

在自动驾驶竞争日益激烈的趋势下,自动驾驶功能不断更新迭代,但任何功能的商业化推出之前,测试是必然的前提,如软件测试、仿真测试、道路测试,尽管在我国政策的支持情况下(如颁发道路测试牌照),自动驾驶道路测试仍然遇到诸多困难,如高昂的道路测试成本、极端场景和危险工况的带来的测试安全性、现有法律法规的容忍度。为此低成本、高效率、保安全的,且更加接近实际道路测试的自动驾驶仿真测试,成为自动驾驶商业最重要的测试之一。
介绍一个重要自动驾驶仿真测试工具-PreSCAN与Simulink的联合仿真测试流程
Prescan:TASS International |
第一步:创建一个新的Experiment
.在我们下载好Prescan并安装好后,点击File→New Experiment,默认名字从上一个名字序号进行累加,我们更名为 Test001,在EXperiment type 里面我们可以选择 GPS系统仿真、 Control系统仿真、 Sensor仿真,这里我们选择默认的Control系统仿真。

第二步:搭建虚拟场景(道路、交通、传感器、环境…)
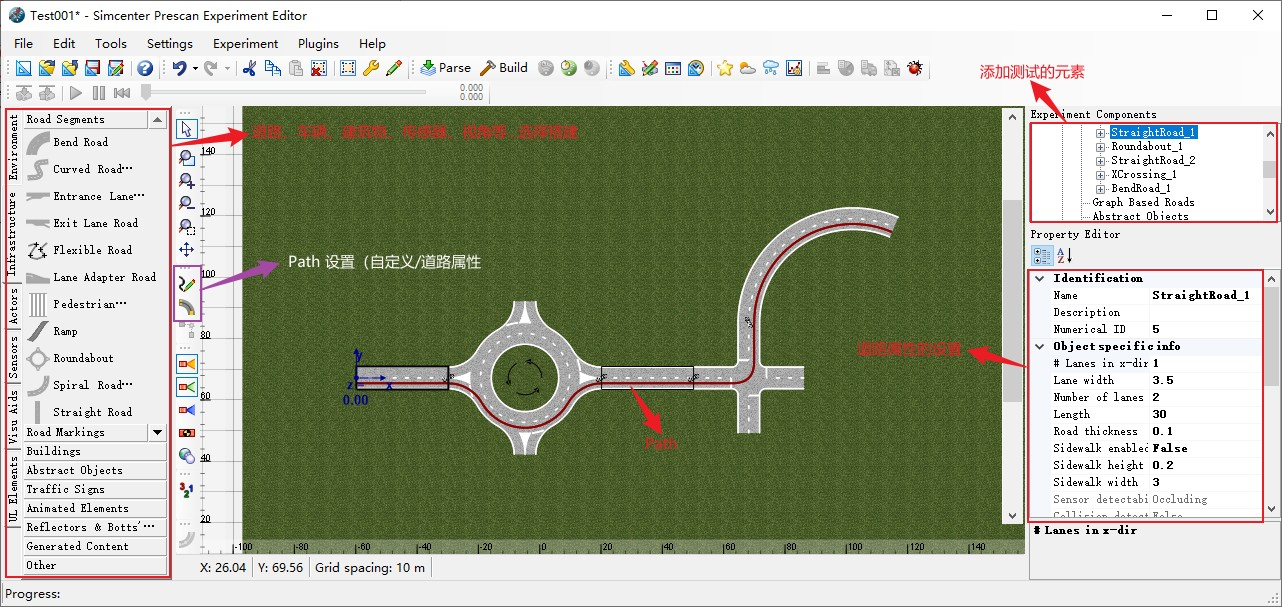
在添加元素时,将所需元素拖进中间窗口即可,注意添加Actors 时需要将车辆放置在Path上,此时path会出现颜色的变化,当右上角Experient Components 里或自动增加Speedprofile_1,点击查看,默认的初始速度为15m/s。
第三步:场景试运行
在添加完所需元素后,我们尝试运行搭建的场景,点击Parse→Build,此时可以看到Start(三角符号)按钮已经由灰色变为蓝色,此时点击按钮,我们可以看到场景已经开始运行
点击Build旁边的Lunch/Refresh 3-D Viewer ,也可以以3D视角查看运行情况
当然这只是个示例,场景搭建的比较简单,也可以添加更多的元素使场景看起来更加真实,如ISO场景:

第四步:与Maltab/Simulink建立联合仿真
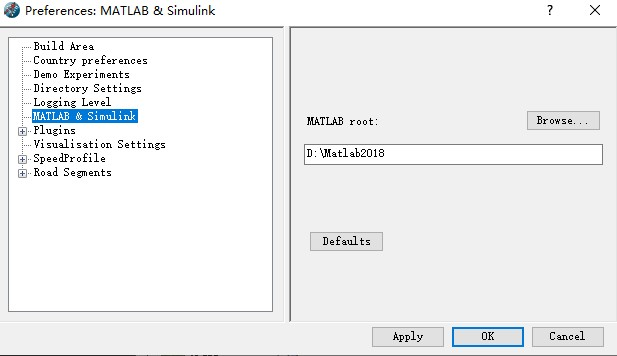
在与Maltab/Simulink联合仿真之前,需要建立两者之间的联系,首先需要安装Matlab软件,然后在Prescan主界面点击 Plugins,选择 plugin preferences,选择Matlab&Simulink,添加Matlab路径:
添加完成后返回Prescan主界面,点击打开3D视图旁边的按钮 Invoke Simulink Run Mode,此时Matlab会自动打开,当出现如下信息时,证明配置成功
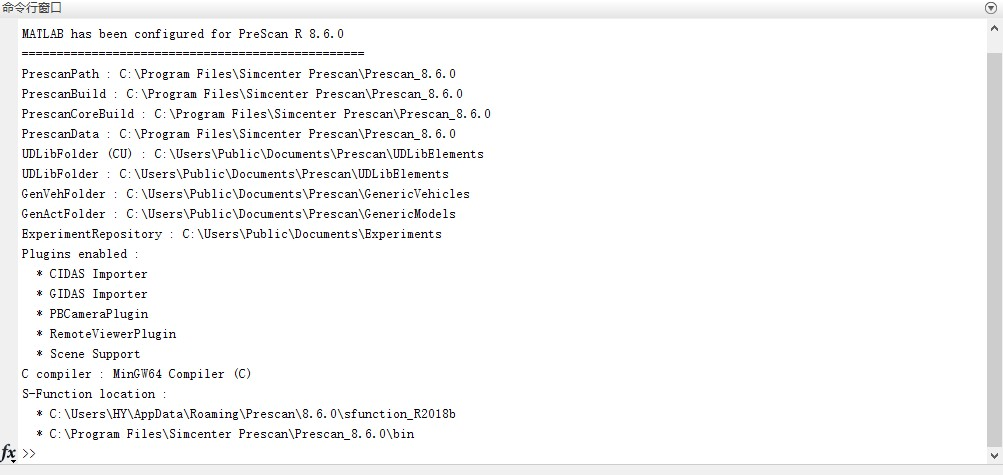
注意:如果报错很可能是编译器安装的问题
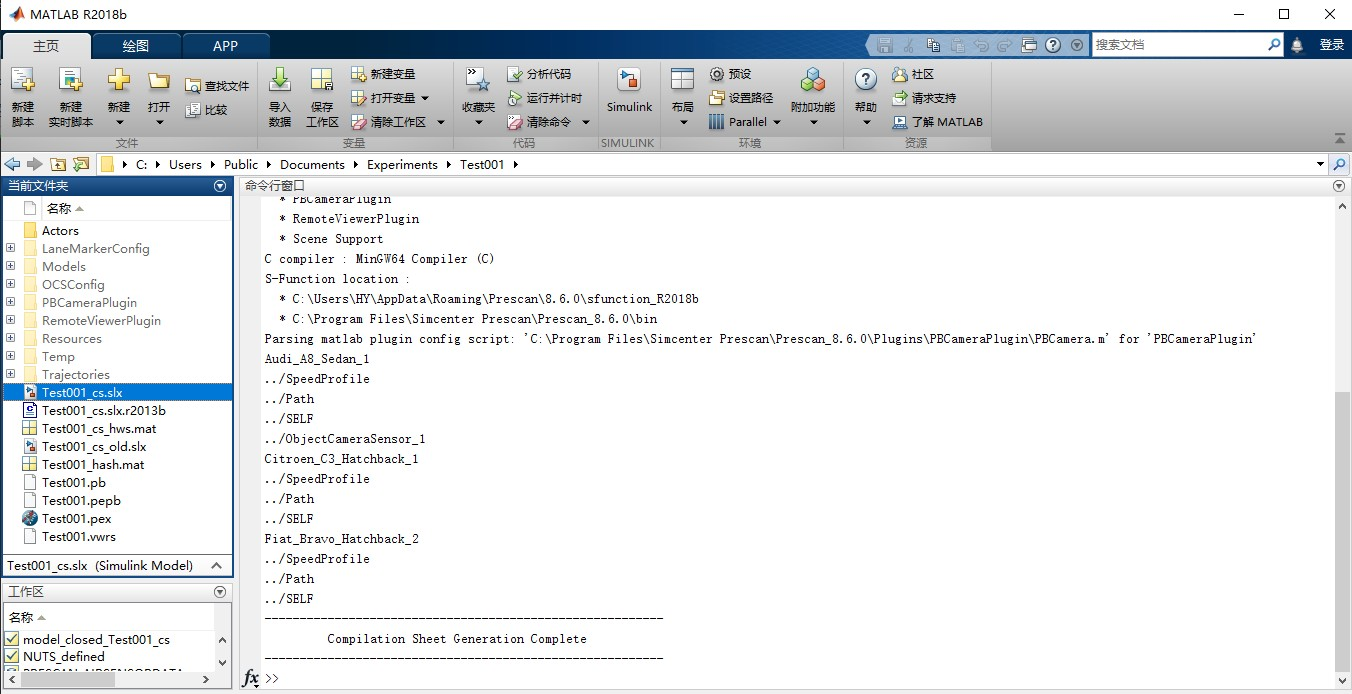
接着从Matlab路径中选择我们创建的Test001文件夹,打开Test001_cs.slx,即我们创建的Simulink模型
打开模型后,我们点击 Regenerate重新生成编译表,点击Matlab运行按钮,即可运行仿真
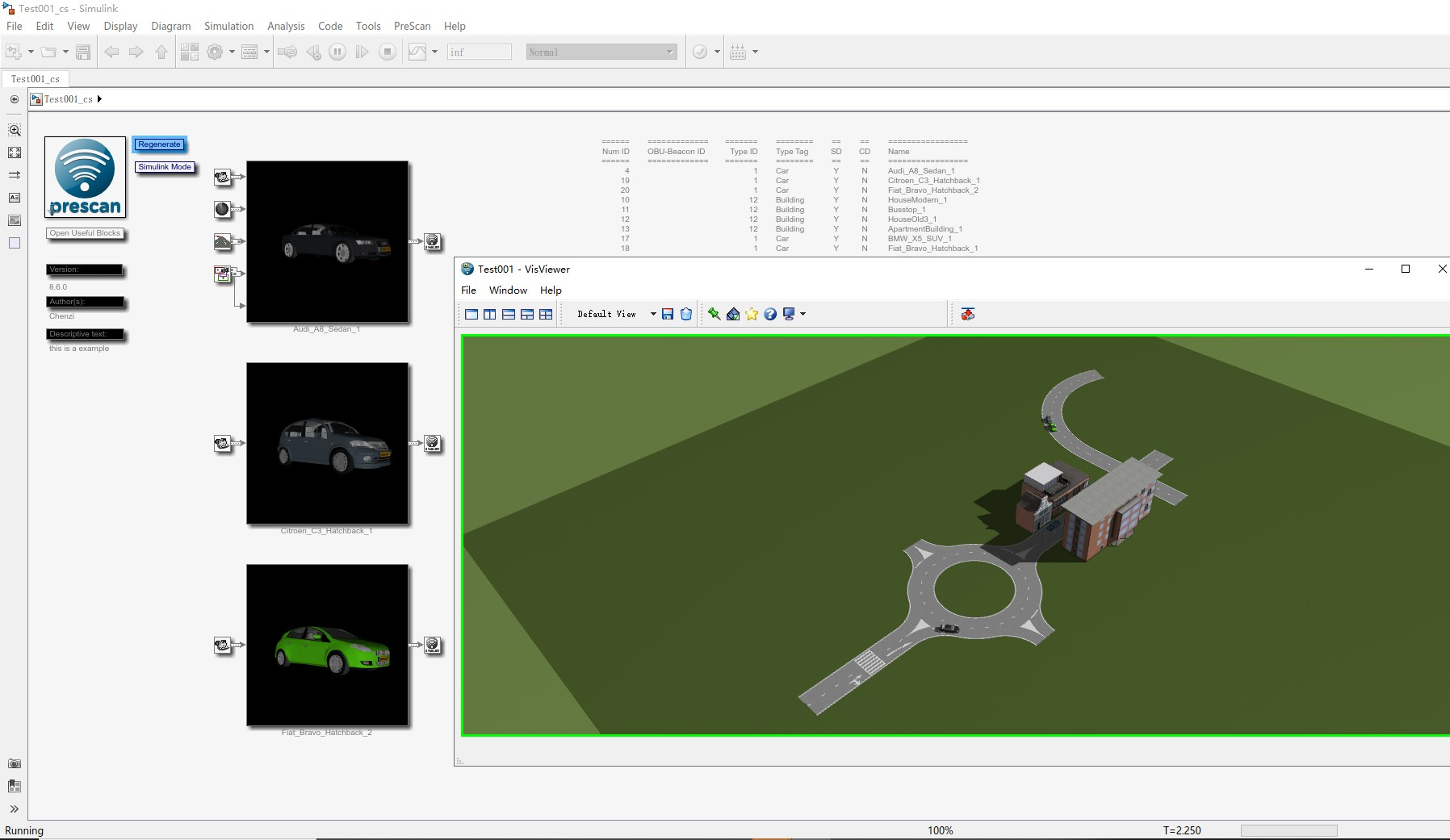
之后我们便可以在Matlab中搭建我们的控制算法,并在仿真环境中进行验证,由于不同软件的侧重点不同,当然在实际开发中会一般会采用Carsim & Prescan &Matlab/Simulink联合仿真的模式。
Original: https://blog.csdn.net/weixin_42445421/article/details/121670405
Author: 橙子CK
Title: 基于PreSCAN& Matlab/Simulink的智能驾驶联合仿真【详细图文】
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/597664/
转载文章受原作者版权保护。转载请注明原作者出处!