

文章目录
- 前言
* - 一、下载需要的安装包
- 二、安装
– - 三、测试
前言
在学习计算机视觉时,学到点云库,需要用到可视化点云工具,在配置python-pcl过程中踩了”ImportError: DLL load failed: 找不到指定的模块”等多个坑,这里整理一个配置流程,希望可以帮助你避坑。 文章python使用版本是3.6版本。
一、下载需要的安装包
1.python-pcl源码:https://github.com/strawlab/python-pcl
2.PCL1.9.1的All-In-One Installer :https://github.com/PointCloudLibrary/pcl/releases/
3.Windows Gtk:http://www.tarnyko.net/dl/gtk.htm
二、安装
1.安装与调整包
1.双击下载好的ALL-In-One Installer进行安装,安装过程会弹出安装OpenNI这个工具,一样安装就行。


2.安装必要的python库
1.cython
2.numpy
python-pcl安装前要求要有cython和numpy这两个库,版本需要跟下载的python-pcl源码相对应,打开python-pc源码目录下的setup.py 可以看到对cython和numpy的版本要求:

在cmd中pip install 下载对应版本就行
我是用的最新版本numpy跟0.26.0的cython
安装指定版本命令为: pip install cython==0.26.0
可能会出现Microsoft Visual C++ xxx is required导致下载失败,这是因为需要下载visual studio 2019,点击cmd提示的连接进行下载即可,下载后就能正常下载cython。
; 3.安装python的pcl源码包
在python-pcl源码目录下打开cmd
前后输入:
python setup.py build_ext -i
python setup.py install
4.复制OpenNI2.dll

; 5.配置环境变量
要保证系统变量有以下路径:
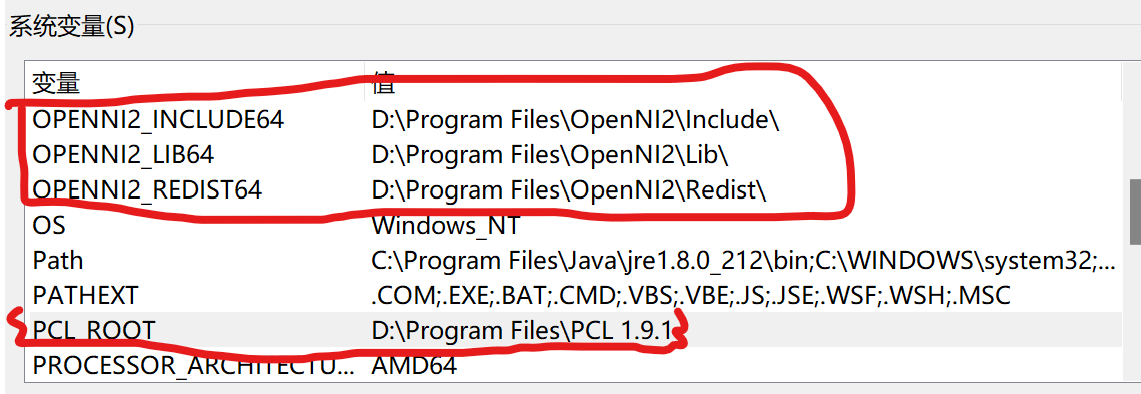
然后编辑Path变量,在path中相对你的安装路径加入以下内容:

6.安装python的pcl库
pip install pclpy
至此,pcl配置完毕。
三、测试
最后import pcl 不再报错

测试代码:
import numpy as np
import pcl
p = pcl.PointCloud(10)
a = np.asarray(p)
a[:] = 0
print(p[3])
a[:, 0] = 1
print(p[3])
以上就是所有内容,本文仅仅介绍了能够顺利配置python-pcl的过程,有了点云处理工具,将支持我们学习三维模型。
补充:
1.运行显示模型时,可能会弹出如下错误:
//报错信息
Generic Warning: In c:\vtk-8.1.2\rendering\core\vtkrenderwindow.cxx, line 1480
vtkRenderWindow::GetPainterDeviceAdapter was deprecated for VTK 8.1 and will be removed in a future version.
Generic Warning: In c:\vtk-8.1.2\rendering\core\vtkmapper.cxx, line 233
vtkMapper::GetGlobalImmediateModeRendering was deprecated for VTK 8.1 and will be removed in a future version.
Generic Warning: In c:\vtk-8.1.2\rendering\core\vtkrenderwindow.cxx, line 1480
vtkRenderWindow::GetPainterDeviceAdapter was deprecated for VTK 8.1 and will be removed in a future version.
解决方法:下载以下链接中的压缩包,解压后将pcl_visualization_release.dll放在路径”D:\Program Files\PCL 1.9.1\bin”下替换即可。
https://github.com/anelsalas/PCL_1_9_1_prebuild_pcl_visualization_release.dll
2.运行后窗口点云出不来:
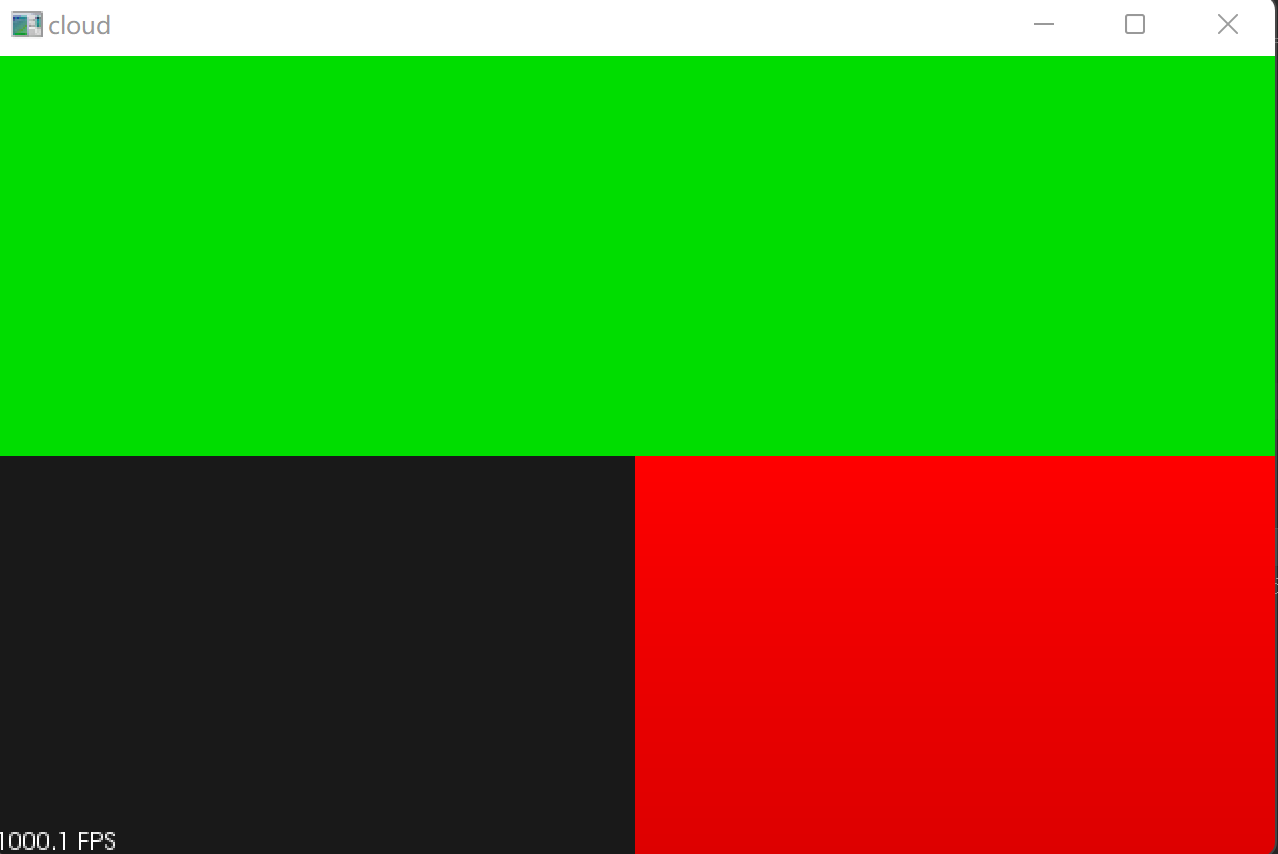
按键盘R即能显示图像:

Original: https://blog.csdn.net/weixin_45949840/article/details/124192561
Author: 马里奥w
Title: python-pcl踩坑后记录完整配置过程
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/760419/
转载文章受原作者版权保护。转载请注明原作者出处!