

1、MMDeteceion初识
MMDetection是一款优秀的基于PyTorch的深度学习目标检测工具箱,由香港中文大学(CUHK)多媒体实验室(mmlab)开发。基本上支持所有当前SOTA二阶段的目标检测算法,比如faster rcnn,mask rcnn,r-fcn,Cascade-RCNN等。读者可在 PyTorch 环境下测试不同的预训练模型及训练新的检测分割模型。
根据 GitHub 项目所述,MMDetection的主要特征可以总结为以下几个方面:
模块化设计:将检测或者分割任务分解成几个模块,通过模块的组合即可完成相应的任务。
支持多个框架,开箱即用:该工具包直接支持多种流行的检测框架,如 Faster RCNN、Mask RCNN、RetinaNet 等。
高效:所有基础边界框和掩码运算都在 GPU 上运行。不同模型的训练速度大约比 FAIR 的 Detectron 快 5% ~ 20%。
技术发展水平:达到了目前最先进的水平。
2、MMDetection安装
了解如何在计算机上安装MMDetection
1、安装条件
Linux(不正式支持Windows)
Python 3.5+
PyTorch 1.1或更高版本
CUDA 9.0或更高
NCCL 2
GCC 4.9或更高
mmcv(https://github.com/open-mmlab/mmcv)
我们已经测试了以下版本的操作系统和软件:
OS: Ubuntu 16.04/18.04 and CentOS 7.2
CUDA: 9.0/9.2/10.0/10.1
NCCL: 2.1.15/2.2.13/2.3.7/2.4.2
GCC(G++): 4.9/5.3/5.4/7.3
2、 安装 mmdetection
2.1 按照官方搭建
a. 创建一个conda虚拟环境并激活它
conda create -n open-mmlab python=3.7-y
conda activate open-mmlab
b. 按照官方说明安装PyTorch和Torchvision(https://pytorch.org/) ,例如,
conda install pytorch torchvision -c pytorch
If you have CUDA 10.1 installed under /usr/local/cuda and would like to install PyTorch 1.5, you need to install the prebuilt PyTorch with CUDA 10.1.
conda install pytorch cudatoolkit=10.1 torchvision -c pytorch
If you have CUDA 9.2 installed under /usr/local/cuda and would like to install PyTorch 1.3.1., you need to install the prebuilt PyTorch with CUDA 9.2.
conda install pytorch=1.3.1 cudatoolkit=9.2 torchvision=0.4.2 -c pytorch
c. 克隆mmdetection存储库
git clone https://github.com/open-mmlab/mmdetection.git
cd mmdetection
d. 安装构建要求,然后安装mmdetection。(我们通过github repo安装pycocotools而不是pypi,因为pypi版本较旧并且与最新的numpy不兼容。)
pip install -r requirements/build.txt -i http://mirrors.aliyun.com/pypi/simple/ --trusted-host mirrors.aliyun.com
pip install "git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI"
pip install -v -e .
安装完成
Using /home/lhy/anaconda3/envs/mmdetection/lib/python3.7/site-packages
Finished processing dependencies for mmdet==2.24.1
注意:
1.git commit的id将在步骤d中写入版本号,例如0.6.0 + 2e7045c。该版本还将保存在经过训练的模型中。建议你每次从github获取一些更新时都运行步骤d。如果修改了C++/CUDA代码,则此步骤为强制性的。
2.按照上述说明,mmdetection将安装在dev模式下,对代码进行的任何本地修改都将生效,而无需重新安装它(除非你提交了一些提交并希望更新版本号)。
3.如果要使用 opencv-python-headless 来代替 opencv-python,可以在安装MMCV之前先安装它。
4.一些依赖关系是可选的。只需运行 pip install -v -e .,将只会安装最低运行时间要求。要使用可选的依赖项如albumentations和imagecorruptions,并使用pip install -r requirements/optional.txt 手动安装它们,或者在调用pip时指定所需的附加项(例如pip install -v -e .[optional])。对于额外字段的有效键为:all,tests,build,和 optional。
或者可以
pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/{cu_version}/{torch_version}/index.html
Please replace {cu_version} and {torch_version} in the url to your desired one. For example, to install the latest mmcv-full with CUDA 11.0 and PyTorch 1.7.0, use the following command:
pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/cu110/torch1.7.0/index.html
2.2 另一个选择: Docker Image
我们提供了一个Dockerfile(https://github.com/open-mmlab/mmdetection/blob/master/docker/Dockerfile)来构建映像。
使用PyTorch 1.1、CUDA 10.0和CUDNN 7.5构建图像
docker build -t mmdetection docker/
2.3 从零开始的安装脚本
这是一个完整的脚本,用于使用conda设置mmdetection并链接数据集路径(假设你的COCO数据集路径为$ COCO_ROOT)。
conda create -n open-mmlab python=3.7-y
conda activate open-mmlab
conda install -c pytorch pytorch torchvision -y
git clone https://github.com/open-mmlab/mmdetection.git
cd mmdetection
pip install -r requirements/build.txt
pip install "git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI"
如果网不好,可以按照下面的步骤安装
git clone https://github.com/cocodataset/cocoapi.git
cd cocoapi/PythonAPI
python setup.py build_ext --inplace
python setup.py build_ext install
pip install -v -e .
mkdir data
ln -s $COCO_ROOT data
2.4 使用多个MMDetection版本
如果你的机器上有多个mmdetection,并且你想交替使用它们,则建议的方法是创建多个conda环境并对不同版本使用不同的环境。
另一种方法是插入下面的代码到主脚本(train.py,test.py或任何其他脚本运行)
import os.path as osp
import sys
sys.path.insert(0,osp.join(osp.dirname(osp.abspath(__file__)),'../'))
或者在相应文件夹的终端中运行以下命令以临时使用当前文件夹。
export PYTHONPATH=pwd:$PYTHONPATH
3、MMDetection之环境测试(推理、评估、展示)
我们提供用于在整个数据集(COCO、PASCAL VOC、Cityscapes 等)上评估现有模型的测试脚本。支持以下测试环境:
单GPU
中央处理器(CPU)
单节点多GPU
多个节点
你可以使用以下命令测试数据集。
RESULT_FILE: Filename of the output results in pickle format. If not specified, the results will not be saved to a file.(输出结果的文件名为pickle格式。如果未指定,结果将不会保存到文件中。)
EVAL_METRICS: Items to be evaluated on the results. Allowed values depend on the dataset, e.g., proposal_fast, proposal, bbox, segm are available for COCO, mAP, recall for PASCAL VOC. Cityscapes could be evaluated by cityscapes as well as all COCO metrics.(根据结果进行评估的项目。允许的值取决于数据集,例如,proposal_fast, proposal, box, segm可用于COCO, mAP, PASCAL VOC的recall。城市景观可以通过城市景观以及所有COCO指标进行评估)
–show: If specified, detection results will be plotted on the images and shown in a new window. It is only applicable to single GPU testing and used for debugging and visualization. Please make sure that GUI is available in your environment. Otherwise, you may encounter an error like cannot connect to X server.
–show-dir: If specified, detection results will be plotted on the images and saved to the specified directory. It is only applicable to single GPU testing and used for debugging and visualization. You do NOT need a GUI available in your environment for using this option.(如果指定,检测结果将绘制在图像上并保存到指定目录。仅适用于单个GPU测试,用于调试和可视化。您的环境中不需要可用的GUI来使用此选项)
–show-score-thr: If specified, detections with scores below this threshold will be removed.
–cfg-options: if specified, the key-value pair optional cfg will be merged into config file(如果指定,键值对可选CFG将被合并到配置文件中)
–eval-options: if specified, the key-value pair optional eval cfg will be kwargs for dataset.evaluate() function, it’s only for evaluation
python tools / test.py $ {CONFIG_FILE} $ {CHECKPOINT_FILE} [--out $ {RESULT_FILE}] [--eval $ {EVAL_METRICS}] [--show]
./tools/dist_test.sh $ {CONFIG_FILE} $ {CHECKPOINT_FILE} $ {GPU_NUM} [--out $ {RESULT_FILE}] [--eval $ {EVAL_METRICS}]
python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--out ${RESULT_FILE}] \
[--eval ${EVAL_METRICS}] \
[--show]
export CUDA_VISIBLE_DEVICES=-1
python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--out ${RESULT_FILE}] \
[--eval ${EVAL_METRICS}] \
[--show]
bash tools/dist_test.sh \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
${GPU_NUM} \
[--out ${RESULT_FILE}]
[--eval ${EVAL_METRICS}] \
tools/dist_test.sh也支持多节点测试,但依赖于 PyTorch 的launch utility。
可选参数:
RESULT_FILE:输出结果的文件名是pickle格式。如果未指定,结果将不会保存到文件中。
EVAL_METRICS:要根据结果评估的项目。允许的值取决于数据集,例如proposal_fast,proposal,bbox,segm可用于COCO和mAP,recall为PASCAL VOC。
–show:如果指定,检测结果将绘制在图像上并显示在新窗口中。它仅适用于单个GPU测试,并用于调试和可视化。请确保GUI在你的环境中可用,否则你可能会遇到类似cannot connect to X server的错误。
如果要评估数据集,请不要同时指定–show。
–show-dir:如果指定,检测结果将绘制在图像上并保存到指定目录。仅适用于单GPU测试,用于调试和可视化。您不需要在您的环境中使用此选项的 GUI。
–work-dir: 如果指定,包含评估指标的检测结果将保存到指定目录。
–cfg-options: 如果指定,键值对可选的cfg将被合并到配置文件中
3.1 对现有预训练模型推理例子:
假设你已经将检查点下载到目录checkpoints/。
1.测试Faster R-CNN并可视化结果。按任意键获取下一张图像
python tools/test.py configs/faster_rcnn_r50_fpn_1x.py \
checkpoints/faster_rcnn_r50_fpn_1x_20181010-3d1b3351.pth \
--show
python tools/test.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--show
python tools/test.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--show-dir faster_rcnn_r50_fpn_1x_results
生成测试结果,.json和.pkl文件,加–eval bbox生成框的信息,用于目标检测。
python tools/test.py configs/faster_rcnn_r50_fpn_1x.py \
checkpoints/faster_rcnn_r50_fpn_1x_20181010-3d1b3351.pth \
--eval bbox --show
2.在PASCAL VOC上测试更快的R-CNN(不保存测试结果)并评估mAP。
python tools/test.py configs/pascal_voc/faster_rcnn_r50_fpn_1x_voc.py \
checkpoints/SOME_CHECKPOINT.pth \
--eval mAP
3、测试Mask R-CNN并评估bbox和mask AP。
python tools/test.py configs/mask_rcnn_r50_fpn_1x.py \
checkpoints/mask_rcnn_r50_fpn_1x_20181010-069fa190.pth \
--out results.pkl --eval bbox segm
4、使用8个GPU测试Mask R-CNN,并评估bbox和mask AP。
./tools/dist_test.sh configs/mask_rcnn_r50_fpn_1x.py \
checkpoints/mask_rcnn_r50_fpn_1x_20181010-069fa190.pth \
8 --out results.pkl --eval bbox segm
./tools/dist_test.sh \
configs/mask-rcnn_r50_fpn_1x_coco.py \
checkpoints/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth \
8 \
--out results.pkl
tools/dist_test.sh也支持多节点测试,但依赖于PyTorch的启动工具。
5、使用 8 个 GPU 测试 Mask R-CNN,并逐类评估指标。配置和检查点文件可在此处获得。
./tools/dist_test.sh \
configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py \
checkpoints/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth \
8 \
--out results.pkl \
--cfg-options test_evaluator.classwise=True
6、在具有8个GPU的COCO test-dev上测试Mask R-CNN,并生成json文件提交给官方评估服务器。
./tools/dist_test.sh configs/mask_rcnn_r50_fpn_1x.py \
checkpoints/mask_rcnn_r50_fpn_1x_20181010-069fa190.pth \
8 --format-only --options "jsonfile_prefix=./mask_rcnn_test-dev_results"
/media/lhy/Swin-Transformer-Object-Detection


你将获得两个json文件mask_rcnn_test-dev_results.bbox.json和mask_rcnn_test-dev_results.segm.json。
7. 使用8个gpu测试Cityscapes上的Mask R-CNN,生成txt和png文件提交到官方评估服务器
./tools/dist_test.sh \
configs/cityscapes/mask_rcnn_r50_fpn_1x_cityscapes.py \
checkpoints/mask_rcnn_r50_fpn_1x_cityscapes_20200227-afe51d5a.pth \
8 \
--format-only \
--options "txtfile_prefix=./mask_rcnn_cityscapes_test_results"
或者
python tools/test.py work_dirs/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco.py work_dirs/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco/latest.pth --out inference_dirs/mask_rcnn_swin_tiny_coco_result.pkl --format-only --show-dir ./inference_dirs/ --options "txtfile_prefix=./inference_dirs/mask_rcnn_swin_tiny_coco_test_results"
生成的png和txt文件将在./mask_rcnn_cityscapes_test_results目录下。
8、 没有地面实况注释的测试
MMDetection 支持使用CocoDataset. 如果你的数据集格式不是COCO格式,请转成COCO格式。例如,如果你的数据集格式是VOC,你可以直接将它转换成COCO格式如果你的数据集格式是Cityscapes,你可以直接将它转换成COCO格式,其余格式可以使用转换。
python tools/dataset_converters/images2coco.py \
${IMG_PATH} \
${CLASSES} \
${OUT} \
[--exclude-extensions]
参数:
IMG_PATH:图片的根路径。
CLASSES:带有类别列表的文本文件。
OUT:输出注解的json文件名。保存目录与IMG_PATH.
exclude-extensions: 需要排除的图片后缀,比如’png’, ‘bmp’。
转换完成后,需要将原来的test_evaluator和test_dataloader替换为注释中的test_evaluator和test_dataloader (在’configs/ base /datasets’中找到当前config对应的数据集),运行:
python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--show]
export CUDA_VISIBLE_DEVICES=-1
python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--out ${RESULT_FILE}] \
[--show]
bash tools/dist_test.sh \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
${GPU_NUM} \
[--show]
假设model zoo中的 checkpoints已经下载到目录checkpoints/,我们可以在 COCO test-dev 上用 8 个 GPU 测试 Mask R-CNN,并使用以下命令生成 JSON 文件。
./tools/dist_test.sh \
configs/mask_rcnn/mask-rcnn_r50_fpn_1x_coco.py \
checkpoints/mask_rcnn_r50_fpn_1x_coco_20200205-d4b0c5d6.pth \
8
此命令生成两个 JSON 文件./work_dirs/coco_instance/test.bbox.json和./work_dirs/coco_instance/test.segm.json.
9、批量推理
MMDetection 支持在测试模式下使用单个图像或批量图像进行推理。默认情况下,我们使用单图推理,您可以通过修改samples_per_gpu测试数据的配置来使用批量推理。您可以通过如下修改配置来做到这一点。
data = dict(train_dataloader=dict(...), val_dataloader=dict(...), test_dataloader=dict(batch_size=2, ...))
或者您可以将其设置–cfg-options为–cfg-options test_dataloader.batch_size=2
10、 网络摄像头演示
我们提供了一个网络摄像头演示来说明结果。
python demo / webcam_demo.py ${CONFIG_FILE} ${CHECKPOINT_FILE} [--device ${GPU_ID}] [--camera-id ${CAMERA-ID}] [--score-thr ${SCORE_THR}]
python demo/webcam_demo.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--device ${GPU_ID}] \
[--camera-id ${CAMERA-ID}] \
[--score-thr ${SCORE_THR}]
python demo/webcam_demo.py configs/faster_rcnn_r50_fpn_1x.py \
checkpoints/faster_rcnn_r50_fpn_1x_20181010-3d1b3351.pth
python demo/webcam_demo.py configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py weights/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth
python demo/webcam_demo.py \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth
11、Video demo
python demo/video_demo.py \
${VIDEO_FILE} \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--device ${GPU_ID}] \
[--score-thr ${SCORE_THR}] \
[--out ${OUT_FILE}] \
[--show] \
[--wait-time ${WAIT_TIME}]
python demo/video_demo.py demo/demo.mp4 \
configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--out result.mp4
python demo/video_demo.py demo/demo.mp4 \
configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--show

使用 GPU 加速的视频演示
此脚本使用 GPU 加速对视频执行推理。
python demo/video_gpuaccel_demo.py \
${VIDEO_FILE} \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
[--device ${GPU_ID}] \
[--score-thr ${SCORE_THR}] \
[--nvdecode] \
[--out ${OUT_FILE}] \
[--show] \
[--wait-time ${WAIT_TIME}]
python demo/video_gpuaccel_demo.py demo/demo.mp4 \
configs/faster_rcnn/faster-rcnn_r50_fpn_1x_coco.py \
checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth \
--nvdecode --out result.mp4
3.2 用于测试图像的高级API
MMDetection 提供用于图像推理的高级 Python API。下面是构建模型和对给定图像或视频进行推理的示例。
v3版本
import cv2
import mmcv
from mmcv.transforms import Compose
from mmengine.utils import track_iter_progress
from mmdet.registry import VISUALIZERS
from mmdet.apis import init_detector, inference_detector
config_file = 'configs/faster_rcnn/faster-rcnn_r50-fpn_1x_coco.py'
checkpoint_file = 'checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
model = init_detector(config_file, checkpoint_file, device='cuda:0')
visualizer = VISUALIZERS.build(model.cfg.visualizer)
visualizer.dataset_meta = model.dataset_meta
img = 'test.jpg'
result = inference_detector(model, img)
img = mmcv.imread(img)
img = mmcv.imconvert(img, 'bgr', 'rgb')
visualizer.add_datasample(
'result',
img,
data_sample=result,
draw_gt=False,
show=True)
model.cfg.test_dataloader.dataset.pipeline[0].type = 'LoadImageFromNDArray'
test_pipeline = Compose(model.cfg.test_dataloader.dataset.pipeline)
visualizer = VISUALIZERS.build(model.cfg.visualizer)
visualizer.dataset_meta = model.dataset_meta
wait_time = 1
video_reader = mmcv.VideoReader('video.mp4')
cv2.namedWindow('video', 0)
for frame in track_iter_progress(video_reader):
result = inference_detector(model, frame, test_pipeline=test_pipeline)
visualizer.add_datasample(
name='video',
image=frame,
data_sample=result,
draw_gt=False,
show=False)
frame = visualizer.get_image()
mmcv.imshow(frame, 'video', wait_time)
cv2.destroyAllWindows()
v2版本
同步接口
MMDetection提供了用于图像推断的高级Python apl。下面是一个在给定的图像或视频上构建模型和推理的例子。
from mmdet.apis import init_detector, inference_detector
import mmcv
config_file = 'configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py'
checkpoint_file = 'checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
model = init_detector(config_file, checkpoint_file, device='cuda:0')
img = 'test.jpg'
result = inference_detector(model, img)
model.show_result(img, result)
model.show_result(img, result, out_file='result.jpg')
video = mmcv.VideoReader('video.mp4')
for frame in video:
result = inference_detector(model, frame)
model.show_result(frame, result, wait_time=1)
异步接口
对于Python 3.7+, MMDetection也支持异步接口。通过使用CUDA流,它允许在GPU绑定推断代码上不阻塞CPU,并使单线程应用程序能够更好地利用CPU/GPU。推理可以在不同的输入数据样本之间,也可以在某些推理管道的不同模型之间并行进行。
请参阅tests/async_benchmark.py比较同步和异步接口的速度。
import asyncio
import torch
from mmdet.apis import init_detector, async_inference_detector
from mmdet.utils.contextmanagers import concurrent
async def main():
config_file = 'configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py'
checkpoint_file = 'checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
device = 'cuda:0'
model = init_detector(config_file, checkpoint=checkpoint_file, device=device)
streamqueue = asyncio.Queue()
streamqueue_size = 3
for _ in range(streamqueue_size):
streamqueue.put_nowait(torch.cuda.Stream(device=device))
img = 'test.jpg'
async with concurrent(streamqueue):
result = await async_inference_detector(model, img)
model.show_result(img, result)
model.show_result(img, result, out_file='result.jpg')
asyncio.run(main())
4、MMDetection之模型训练
1、在标准数据集上训练预定义模型
MMDetection 还提供开箱即用的工具来训练检测模型。本节将展示如何在标准数据集(即 COCO)上训练预定义模型(在configs下)。
1、 Dataset Download数据下载
tools/misc/download_dataset.py supports downloading datasets such as COCO, VOC, and LVIS.
python tools/misc/download_dataset.py --dataset-name coco2017
python tools/misc/download_dataset.py --dataset-name voc2007
python tools/misc/download_dataset.py --dataset-name lvis
2、 Dataset Conversion数据转换
tools/data_converters/ contains tools to convert the Cityscapes dataset and Pascal VOC dataset to the COCO format.
tools/data_converters/包含将Cityscapes数据集和Pascal VOC数据集转换为COCO格式的工具。
python tools/dataset_converters/cityscapes.py ${CITYSCAPES_PATH} [-h] [--img-dir ${IMG_DIR}] [--gt-dir ${GT_DIR}] [-o ${OUT_DIR}] [--nproc ${NPROC}]
python tools/dataset_converters/pascal_voc.py ${DEVKIT_PATH} [-h] [-o ${OUT_DIR}]
3、准备数据集
训练也需要准备数据集。有关详细信息,请参阅上面的准备数据集部分。
注意:目前,下面的配置文件configs/cityscapes使用COCO预训练的权重进行初始化。如果网络连接不可用或速度慢,您可以提前下载现有模型。否则会导致训练开始时出错。
4、学习率自动缩放(重要)
重要提示:配置文件中的 默认学习率适用于 8 个 GPU 和每个 GPU 2 个样本(批量大小 = 8 * 2 = 16)。它已设置为auto_scale_lr.base_batch_size in config/ base/default_runtime.py。 当批量大小为16时,学习率将根据此值自动缩放。 同时,为了不影响其他基于mmdet的代码库,该标志默认auto_scale_lr.enable设置为False。
如果要启用此功能,则需要添加参数–auto-scale-lr。在处理命令之前,您需要检查要使用的配置名称,因为配置名称表示默认的批处理大小。
By default, it is 8 x 2 = 16 batch size, like faster_rcnn_r50_caffe_fpn_90k_coco.py or pisa_faster_rcnn_x101_32x4d_fpn_1x_coco.py.

In other cases, you will see the config file name have NxM in dictating, like cornernet_hourglass104_mstest_32x3_210e_coco.py which batch size is 32 x 3 = 96, or scnet_x101_64x4d_fpn_8x1_20e_coco.py which batch size is 8 x 1 = 8.
请记住检查您要使用的特定配置文件的底部,如果批处理大小不是16会有auto_scale_lr.base_batch_size. 如果找不到这些值,请检查其中的配置文件, base=[xxx]您会找到它。如果你想自动缩放 LR,请不要修改它的值。
学习率自动缩放的基本用法如下。
python tools/train.py \
${CONFIG_FILE} \
--auto-scale-lr \
[optional arguments]
如果启用此功能,学习率将根据机器上的 GPU 数量和训练的批量大小自动缩放。有关详细信息,请参见线性缩放规则。例如,如果有 4 个 GPU,每个 GPU 上有 2 张图片,那么lr = 0.01。如果有 16 个 GPU,每个 GPU 上有 4 张图片,它会自动缩放到lr = 0.08。如果你不想使用它,你需要根据线性缩放规则手动计算学习率,然后optimizer.lr在特定的配置文件中更改

; 5、模型进行训练
1、 在单个GPU上训练
python tools/train.py \
${CONFIG_FILE} \
[optional arguments]
python tools/train.py configs/swin/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco.py
在培训过程中,日志文件和检查点将被保存到工作目录中,工作目录由配置文件中的work_dir指定或通过CLI参数——work-dir指定。在命令中指定工作目录,则可以添加参数–work_dir $ {YOUR_WORK_DIR}


默认情况下,模型每隔一段时间就会在验证集上评估,评估间隔可以在配置文件中指定,如下所示。
evaluation = dict(interval=12)
该工具接受几个可选参数,包括:
--no-validate (not suggested): Disable evaluation during training.在培训期间禁用评估
--work-dir ${WORK_DIR}: Override the working directory.设置工作目录
--resume-from ${CHECKPOINT_FILE}: Resume from a previous checkpoint file.从上一个检查点文件恢复
--options 'Key=value': Overrides other settings in the used config.覆盖所使用配置中的其他设置
2、Training on CPU
CPU上的训练过程与单GPU训练过程一致。我们只需要在训练前禁用图形处理器。
export CUDA_VISIBLE_DEVICES=-1
python tools/train.py \
${CONFIG_FILE} \
[optional arguments]
我们不建议用户使用 CPU 进行训练,因为它太慢了。我们支持此功能是为了方便用户在没有 GPU 的机器上进行调试。
3、Training on multiple GPUs
bash ./tools/dist_train.sh \
${CONFIG_FILE} \
${GPU_NUM} \
[optional arguments]
./tools/dist_train.sh $ {CONFIG_FILE} $ {GPU_NUM} [可选参数]
案例:多gpu断点恢复模型训练
./tools/dist_train.sh configs/swin/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco.py 3 --resume-from work_dirs/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco/latest.pth
4、同时启动多个作业
在单台计算机上启动多个作业
如果你使用dist_train.sh启动训练作业,则可以在命令中设置端口。
如果你想在一台机器上启动多个任务,例如,在一台有8个gpu的机器上启动2个4-GPU训练的任务,你需要为每个任务指定不同的端口(默认29500),以避免通信冲突。如果使用dist_train.sh启动培训作业,可以在命令中设置端口。
CUDA_VISIBLE_DEVICES=0,1,2,3 PORT=29500 ./tools/dist_train.sh ${CONFIG_FILE} 4
CUDA_VISIBLE_DEVICES=4,5,6,7 PORT=29501 ./tools/dist_train.sh ${CONFIG_FILE} 4
5、 用多台机器训练
如果您使用多台仅通过以太网连接的机器启动,则只需运行以下命令即可:
在第一台机器上:
NNODES=2 NODE_RANK=0 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR sh tools/dist_train.sh $CONFIG $GPUS
在第二台机器上:
NNODES=2 NODE_RANK=1 PORT=$MASTER_PORT MASTER_ADDR=$MASTER_ADDR sh tools/dist_train.sh $CONFIG $GPUS
通常,如果您没有像 InfiniBand 这样的高速网络,它会很慢。
6、 使用 Slurm 管理作业
如果在由slurm(https://slurm.schedmd.com/) 管理的群集上运行MMDetection,则可以使用脚本”slurm_train.sh”。(此脚本还支持单机训练。)
[GPUS=${GPUS}] ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${WORK_DIR}
./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} ${CONFIG_FILE} ${WORK_DIR} [${GPUS}]
下面是一个使用16个gpu在一个名为dev的Slurm分区上训练Mask R-CNN的示例,并将工作目录设置为一些共享文件系统。
GPUS=16 ./tools/slurm_train.sh dev mask_r50_1x configs/mask_rcnn_r50_fpn_1x_coco.py /nfs/xxxx/mask_rcnn_r50_fpn_1x
你可以检查slurm_train.sh(https://github.com/open-mmlab/mmdetection/blob/master/tools/slurm_train.sh) 中的完整参数和环境变量。
使用Slurm时,port选项可以通过以下方式设置:
CUDA_VISIBLE_DEVICES=0,1,2,3 GPUS=4 ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} config1.py ${WORK_DIR} --options 'dist_params.port=29500'
CUDA_VISIBLE_DEVICES=4,5,6,7 GPUS=4 ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} config2.py ${WORK_DIR} --options 'dist_params.port=29501'
如果只有多台计算机与以太网连接,则可以参考 pytorch 启动实用程序(https://pytorch.org/docs/stable/distributed_deprecated.html#launch-utility)。如果没有像infiniband这样的高速网络,通常速度很慢。
如果你将启动训练作业与slurm一起使用,则需要修改配置文件(通常是配置文件底部的第6行)以设置不同的通信端口。
在config1.py中,
dist_params = dict(backend='nccl', port=29500)
In config2.py, set
dist_params = dict(backend='nccl',port= 29501)
然后,你可以使用config1.py和config2.py启动两个作业。
CUDA_VISIBLE_DEVICES=0,1,2,3 GPUS=4 ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} config1.py ${WORK_DIR}
CUDA_VISIBLE_DEVICES=4,5,6,7 GPUS=4 ./tools/slurm_train.sh ${PARTITION} ${JOB_NAME} config2.py ${WORK_DIR}
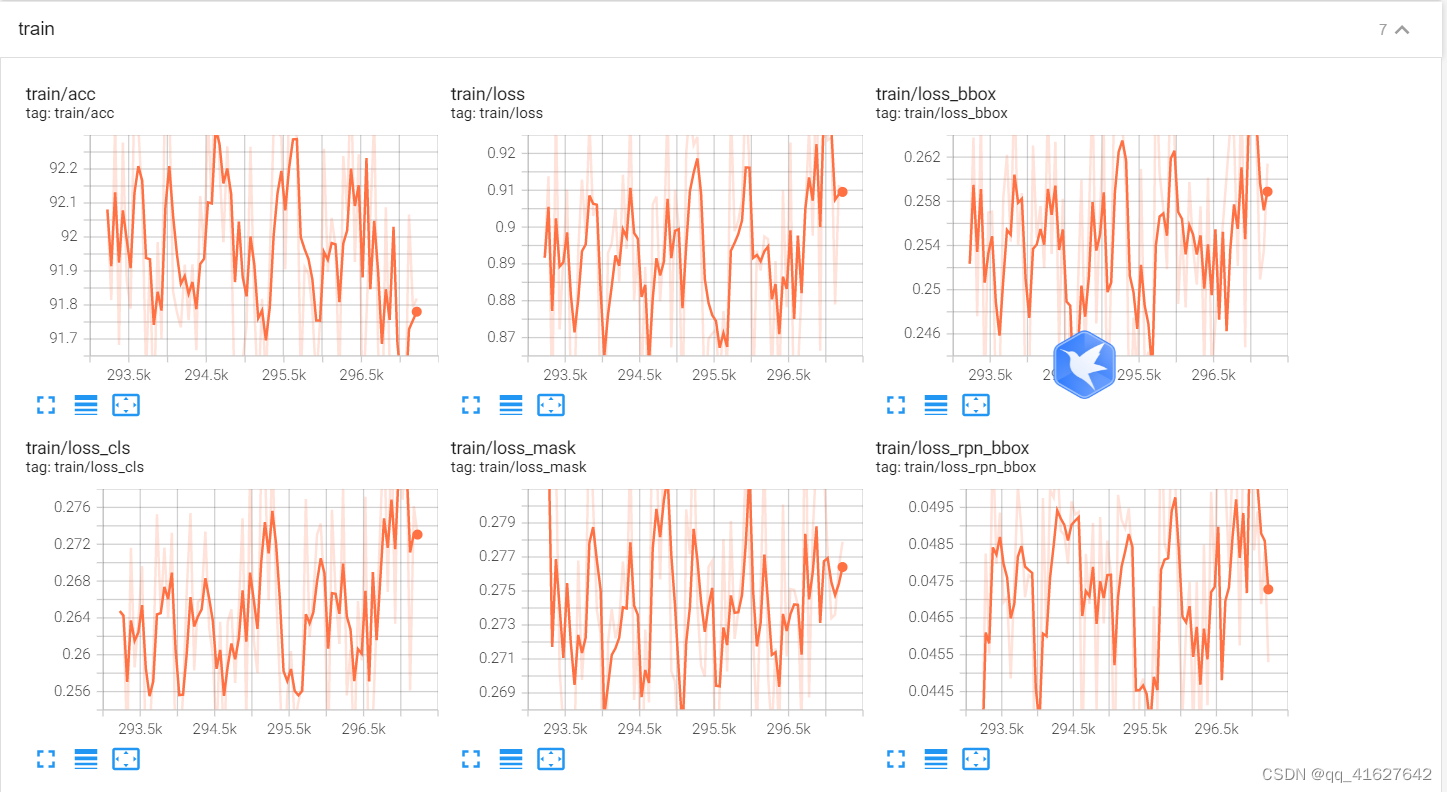
7、Tensorboard 在线查看训练效果
1、修改配置configs_base_\default_runtime.py

; 2、Tensorboard 在线查看模型训练效果
tensorboard --logdir work_dirs/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco/tf_logs --host 10.1.42.60
8、Test and inference
python tools/test.py configs/balloon/mask_rcnn_r50_caffe_fpn_mstrain-poly_1x_balloon.py work_dirs/mask_rcnn_r50_caffe_fpn_mstrain-poly_1x_balloon/latest.pth --eval bbox segm

2、 自定义数据集上训练预定义模型
在这一部分中,您将了解如何使用自定义数据集训练预定义模型,然后对其进行测试。我们以气球数据集为例来描述整个过程。
基本步骤如下:
准备自定义数据集
准备配置文件
在自定义数据集上训练、测试和推断模型。
1 、准备自定义数据集
1、 将数据集重组为COCO格式。
2、将数据集重新组织为中间格式。
3、实现一个新的数据集。
通常我们推荐使用前两种方法,它们通常比第三种更容易。
注意:MMDetection目前只支持评估coco格式数据集的掩码AP。例如实例分割任务用户应该将数据转换成coco格式。
更新注意:自 MMDetection 3.0 以来,数据集和指标已解耦,CityScapes 除外。因此,用户可以在验证期间对任何格式的数据集使用任何类型的评估指标。例如:使用 VOC 指标评估 COCO 数据集,或使用 VOC 和 COCO 指标评估 OpenImages 数据集。
在这篇笔记中,我们给出了一个将数据转换成 COCO 格式的例子。
COCO注释格式
{
"images": [image],
"annotations": [annotation],
"categories": [category]
}
image = {
"id": int,
"width": int,
"height": int,
"file_name": str,
}
annotation = {
"id": int,
"image_id": int,
"category_id": int,
"segmentation": RLE or [polygon],
"area": float,
"bbox": [x,y,width,height],
"iscrowd": 0 or 1,
}
categories = [{
"id": int,
"name": str,
"supercategory": str,
}]
假设我们使用气球数据集。下载数据后,我们需要实现一个将标注格式转换为COCO格式的功能。然后我们可以使用CocoDataset来加载数据并进行训练和评估。
如果查看数据集,您会发现数据集格式如下:
{'base64_img_data': '',
'file_attributes': {},
'filename': '34020010494_e5cb88e1c4_k.jpg',
'fileref': '',
'regions': {'0': {'region_attributes': {},
'shape_attributes': {'all_points_x': [1020,
1000,
994,
1003,
1023,
1050,
1089,
1134,
1190,
1265,
1321,
1361,
1403,
1428,
1442,
1445,
1441,
1427,
1400,
1361,
1316,
1269,
1228,
1198,
1207,
1210,
1190,
1177,
1172,
1174,
1170,
1153,
1127,
1104,
1061,
1032,
1020],
'all_points_y': [963,
899,
841,
787,
738,
700,
663,
638,
621,
619,
643,
672,
720,
765,
800,
860,
896,
942,
990,
1035,
1079,
1112,
1129,
1134,
1144,
1153,
1166,
1166,
1150,
1136,
1129,
1122,
1112,
1084,
1037,
989,
963],
'name': 'polygon'}}},
'size': 1115004}
注释是一个 JSON 文件,其中每个键表示图像的所有注释。将气球数据集转换成coco格式的代码如下。
import os.path as osp
import mmcv
from mmengine.fileio import dump, load
from mmengine.utils import track_iter_progress
def convert_balloon_to_coco(ann_file, out_file, image_prefix):
data_infos = load(ann_file)
annotations = []
images = []
obj_count = 0
for idx, v in enumerate(track_iter_progress(data_infos.values())):
filename = v['filename']
img_path = osp.join(image_prefix, filename)
height, width = mmcv.imread(img_path).shape[:2]
images.append(
dict(id=idx, file_name=filename, height=height, width=width))
for _, obj in v['regions'].items():
assert not obj['region_attributes']
obj = obj['shape_attributes']
px = obj['all_points_x']
py = obj['all_points_y']
poly = [(x + 0.5, y + 0.5) for x, y in zip(px, py)]
poly = [p for x in poly for p in x]
x_min, y_min, x_max, y_max = (min(px), min(py), max(px), max(py))
data_anno = dict(
image_id=idx,
id=obj_count,
category_id=0,
bbox=[x_min, y_min, x_max - x_min, y_max - y_min],
area=(x_max - x_min) * (y_max - y_min),
segmentation=[poly],
iscrowd=0)
annotations.append(data_anno)
obj_count += 1
coco_format_json = dict(
images=images,
annotations=annotations,
categories=[{
'id': 0,
'name': 'balloon'
}])
dump(coco_format_json, out_file)
if __name__ == '__main__':
convert_balloon_to_coco(ann_file='data/balloon/train/via_region_data.json',
out_file='data/balloon/train/annotation_coco.json',
image_prefix='data/balloon/train')
convert_balloon_to_coco(ann_file='data/balloon/val/via_region_data.json',
out_file='data/balloon/val/annotation_coco.json',
image_prefix='data/balloon/val')
CocoDataset使用上面的功能,用户可以成功的将标注文件转换成json格式,然后我们就可以使用CocoMetric.
2 、根据自定义数据集准备配置文件(这属于简单的)
第二步是准备一个配置,这样数据集就可以成功加载。假设我们想要使用带有FPN的Mask R-CNN,在气球数据集上训练检测器的配置如下所示。
假设配置位于configs/balloon/目录下,命名为mask_rcnn_r50_caffe_fpn_mstrain-poly_1x_balloon.py,配置如下所示。
_base_ = 'mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_1x_coco.py'
model = dict(
roi_head=dict(
bbox_head=dict(num_classes=1),
mask_head=dict(num_classes=1)))
dataset_type = 'COCODataset'
classes = ('balloon',)
data = dict(
train=dict(
img_prefix='balloon/train/',
classes=classes,
ann_file='balloon/train/annotation_coco.json'),
val=dict(
img_prefix='balloon/val/',
classes=classes,
ann_file='balloon/val/annotation_coco.json'),
test=dict(
img_prefix='balloon/val/',
classes=classes,
ann_file='balloon/val/annotation_coco.json'))
load_from = 'checkpoints/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth'
_base_ = '../mask_rcnn/mask-rcnn_r50-caffe_fpn_ms-poly-1x_coco.py'
model = dict(
roi_head=dict(
bbox_head=dict(num_classes=1), mask_head=dict(num_classes=1)))
data_root = 'data/balloon/'
metainfo = {
'classes': ('balloon', ),
'palette': [
(220, 20, 60),
]
}
train_dataloader = dict(
batch_size=1,
dataset=dict(
data_root=data_root,
metainfo=metainfo,
ann_file='train/annotation_coco.json',
data_prefix=dict(img='train/')))
val_dataloader = dict(
dataset=dict(
data_root=data_root,
metainfo=metainfo,
ann_file='val/annotation_coco.json',
data_prefix=dict(img='val/')))
test_dataloader = val_dataloader
val_evaluator = dict(ann_file=data_root + 'val/annotation_coco.json')
test_evaluator = val_evaluator
load_from = 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth'
3、 训练新模型
要用新的配置训练模型,您可以简单地运行
python tools/train.py configs/balloon/mask_rcnn_r50_caffe_fpn_mstrain-poly_1x_balloon.py
python tools/train.py configs/balloon/mask-rcnn_r50-caffe_fpn_ms-poly-1x_balloon.py
4、 测试和推理
python tools/test.py configs/balloon/mask-rcnn_r50-caffe_fpn_ms-poly-1x_balloon.py work_dirs/mask-rcnn_r50-caffe_fpn_ms-poly-1x_balloon/epoch_12.pth
3、使用自定义模型(重要)和标准数据集进行训练
在本笔记中,您将了解如何在标准数据集下训练、测试和推理您自己的自定义模型。我们使用 cityscapes 数据集训练一个自定义的 Cascade Mask R-CNN R50 模型作为示例来演示整个过程,它使用AugFPN替换默认FPN为颈部,并添加Rotate或TranslateX作为训练时自动增强。
基本步骤如下:
准备标准数据集
准备您自己的定制模型
准备配置
在标准数据集上训练、测试和推理模型。
1、准备标准数据集
在本笔记中,我们以标准的 cityscapes 数据集为例。
建议将数据集根符号链接到$MMDETECTION/data. 如果您的文件夹结构不同,您可能需要更改配置文件中的相应路径。
mmdetection
├── mmdet
├── tools
├── configs
├── data
│ ├── coco
│ │ ├── annotations
│ │ ├── train2017
│ │ ├── val2017
│ │ ├── test2017
│ ├── cityscapes
│ │ ├── annotations
│ │ ├── leftImg8bit
│ │ │ ├── train
│ │ │ ├── val
│ │ ├── gtFine
│ │ │ ├── train
│ │ │ ├── val
│ ├── VOCdevkit
│ │ ├── VOC2007
│ │ ├── VOC2012
或者您可以通过以下方式设置数据集根
export MMDET_DATASETS=$data_root
我们将数据集根目录替换为$MMDET_DATASETS,这样您就不用修改配置文件中对应的路径了。
cityscapes 注释必须使用以下方法转换为 coco 格式tools/dataset_converters/cityscapes.py:
pip install cityscapesscripts
python tools/dataset_converters/cityscapes.py ./data/cityscapes --nproc 8 --out-dir ./data/cityscapes/annotations
目前配置文件cityscapes使用COCO预训练权重进行初始化。如果网络不可用或速度较慢,您可以提前下载预训练模型,否则会导致训练开始时出错。
2、 准备您自己的自定义模型
假设我们想实现一个名为AugFPN的新颈部,用现有检测器Cascade Mask R-CNN R50下的默认FPN替换。下面实现了AugFPN under MMDetection。
1. Define a new neck (e.g. AugFPN)
首先创建一个新文件mmdet/models/necks/augfpn.py。
from ..builder import NECKS
@NECKS.register_module()
class AugFPN(nn.Module):
def __init__(self,
in_channels,
out_channels,
num_outs,
start_level=0,
end_level=-1,
add_extra_convs=False):
pass
def forward(self, inputs):
pass
2. Import the module(导入模块)
您可以将以下行添加到mmdet/models/necks/ init.py,
from .augfpn import AugFPN
或者添加以下到配置文件,避免修改原始代码
custom_imports = dict(
imports=['mmdet.models.necks.augfpn'],
allow_failed_imports=False)
3.修改配置文件
neck=dict(
type='AugFPN',
in_channels=[256, 512, 1024, 2048],
out_channels=256,
num_outs=5)
关于定制你自己的模型(例如实现一个新的主干、头部、损失等)和运行时训练设置(例如定义一个新的优化器、使用梯度剪辑、定制训练计划和钩子等)的更多详细用法,请参考指南分别自定义模型和自定义运行时设置。
3、准备一个完成修改后的配置文件
第三步是为您自己的训练设置准备配置。假设我们想对现有的Cascade Mask R-CNN R50 添加AugFPN和Rotate/或Translate扩充来训练cityscapes数据集,并假设配置在目录下configs/cityscapes/并命名为cascade-mask-rcnn_r50_augfpn_autoaug-10e_cityscapes.py,配置如下。
_base_ = [
'../_base_/models/cascade_mask_rcnn_r50_fpn.py',
'../_base_/datasets/cityscapes_instance.py', '../_base_/default_runtime.py'
]
model = dict(
backbone=dict(init_cfg=None),
neck=dict(
type='AugFPN',
in_channels=[256, 512, 1024, 2048],
out_channels=256,
num_outs=5),
roi_head=dict(
bbox_head=[
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.1, 0.1, 0.2, 0.2]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
loss_weight=1.0)),
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.05, 0.05, 0.1, 0.1]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
loss_weight=1.0)),
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.033, 0.033, 0.067, 0.067]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
],
mask_head=dict(
type='FCNMaskHead',
num_convs=4,
in_channels=256,
conv_out_channels=256,
num_classes=8,
loss_mask=dict(
type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))))
img_norm_cfg = dict(
mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
train_pipeline = [
dict(type='LoadImageFromFile'),
dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
dict(
type='AutoAugment',
policies=[
[dict(
type='Rotate',
level=5,
img_fill_val=(124, 116, 104),
prob=0.5,
scale=1)
],
[dict(type='Rotate', level=7, img_fill_val=(124, 116, 104)),
dict(
type='Translate',
level=5,
prob=0.5,
img_fill_val=(124, 116, 104))
],
]),
dict(
type='Resize', img_scale=[(2048, 800), (2048, 1024)], keep_ratio=True),
dict(type='RandomFlip', flip_ratio=0.5),
dict(type='Normalize', **img_norm_cfg),
dict(type='Pad', size_divisor=32),
dict(type='DefaultFormatBundle'),
dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels', 'gt_masks']),
]
data = dict(
samples_per_gpu=1,
workers_per_gpu=3,
train=dict(dataset=dict(pipeline=train_pipeline)))
optimizer = dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001)
optimizer_config = dict(grad_clip=None)
lr_config = dict(
policy='step',
warmup='linear',
warmup_iters=500,
warmup_ratio=0.001,
step=[8])
runner = dict(type='EpochBasedRunner', max_epochs=10)
load_from = 'https://download.openmmlab.com/mmdetection/v2.0/cascade_rcnn/cascade_mask_rcnn_r50_fpn_1x_coco/cascade_mask_rcnn_r50_fpn_1x_coco_20200203-9d4dcb24.pth'
_base_ = [
'../_base_/models/cascade-mask-rcnn_r50_fpn.py',
'../_base_/datasets/cityscapes_instance.py', '../_base_/default_runtime.py'
]
model = dict(
backbone=dict(init_cfg=None),
neck=dict(
type='AugFPN',
in_channels=[256, 512, 1024, 2048],
out_channels=256,
num_outs=5),
roi_head=dict(
bbox_head=[
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.1, 0.1, 0.2, 0.2]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
loss_weight=1.0)),
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.05, 0.05, 0.1, 0.1]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0,
loss_weight=1.0)),
dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.033, 0.033, 0.067, 0.067]),
reg_class_agnostic=True,
loss_cls=dict(
type='CrossEntropyLoss',
use_sigmoid=False,
loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0))
],
mask_head=dict(
type='FCNMaskHead',
num_convs=4,
in_channels=256,
conv_out_channels=256,
num_classes=8,
loss_mask=dict(
type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))))
train_pipeline = [
dict(type='LoadImageFromFile'),
dict(type='LoadAnnotations', with_bbox=True, with_mask=True),
dict(
type='AutoAugment',
policies=[
[dict(
type='Rotate',
level=5,
img_fill_val=(124, 116, 104),
prob=0.5,
scale=1)
],
[dict(type='Rotate', level=7, img_fill_val=(124, 116, 104)),
dict(
type='TranslateX',
level=5,
prob=0.5,
img_fill_val=(124, 116, 104))
],
]),
dict(
type='RandomResize',
scale=[(2048, 800), (2048, 1024)],
keep_ratio=True),
dict(type='RandomFlip', prob=0.5),
dict(type='PackDetInputs'),
]
train_dataloader = dict(
batch_size=1,
num_workers=3,
dataset=dict(pipeline=train_pipeline))
optim_wrapper = dict(
type='OptimWrapper',
optimizer=dict(type='SGD', lr=0.01, momentum=0.9, weight_decay=0.0001))
param_scheduler = [
dict(
type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
dict(
type='MultiStepLR',
begin=0,
end=10,
by_epoch=True,
milestones=[8],
gamma=0.1)
]
train_cfg = dict(max_epochs=10, val_interval=1)
load_from = 'https://download.openmmlab.com/mmdetection/v2.0/cascade_rcnn/cascade_mask_rcnn_r50_fpn_1x_coco/cascade_mask_rcnn_r50_fpn_1x_coco_20200203-9d4dcb24.pth'
4、训练新模型
要使用新配置训练模型,您只需运行
python tools/train.py configs/cityscapes/cascade-mask-rcnn_r50_augfpn_autoaug-10e_cityscapes.py
5、测试和推理
要测试经过训练的模型,您可以简单地运行
python tools/test.py configs/cityscapes/cascade-mask-rcnn_r50_augfpn_autoaug-10e_cityscapes.py work_dirs/cascade-mask-rcnn_r50_augfpn_autoaug-10e_cityscapes/epoch_10.pth
4、微调模型
在 COCO 数据集上预训练的检测器可以作为其他数据集(例如 CityScapes 和 KITTI 数据集)的良好预训练模型。 本教程指导用户将Model Zoo中提供的模型用于其他数据集以获得更好的性能。
以Cityscapes Dataset上的finetuning过程为例,用户需要修改config中的五个部分。
1、继承基础配置
为了减轻编写整个配置的负担并减少错误,MMDetection V2.0 支持从多个现有配置中继承配置。为了微调 Mask RCNN 模型,需要继承新的配置 base/models/mask-rcnn_r50_fpn.py来构建模型的基本结构。要使用 Cityscapes 数据集,新配置也可以简单地继承_base_/datasets/cityscapes_instance.py. 对于记录器设置等运行时设置,新配置需要继承_base_/default_runtime.py. 对于训练计划,新的配置可以继承_base_/schedules/schedule_1x.py。这些配置都在configs目录中,用户也可以选择全部写入而不是继承。
_base_ = [
'../_base_/models/mask-rcnn_r50_fpn.py',
'../_base_/datasets/cityscapes_instance.py', '../_base_/default_runtime.py',
'../_base_/schedules/schedule_1x.py'
]
2、修改头部的类别数
然后新的配置需要根据新数据集的类别数修改头部。 仅更改num_classes在roi_head,除最终预测头外,预训练模型的权重大部分被重用。
model = dict(
roi_head=dict(
bbox_head=dict(
type='Shared2FCBBoxHead',
in_channels=256,
fc_out_channels=1024,
roi_feat_size=7,
num_classes=8,
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.1, 0.1, 0.2, 0.2]),
reg_class_agnostic=False,
loss_cls=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
loss_bbox=dict(type='SmoothL1Loss', beta=1.0, loss_weight=1.0)),
mask_head=dict(
type='FCNMaskHead',
num_convs=4,
in_channels=256,
conv_out_channels=256,
num_classes=8,
loss_mask=dict(
type='CrossEntropyLoss', use_mask=True, loss_weight=1.0))))
3、修改数据集
用户可能还需要准备数据集并编写有关数据集的配置,请参阅自定义数据集以获取更多详细信息。MMDetection V3.0 已经支持 VOC、WIDERFACE、COCO、LIVS、OpenImages、DeepFashion 和 Cityscapes 数据集。
4、修改训练计划
微调超参数与默认计划不同。它通常需要更小的学习率和更少的训练周期.
optim_wrapper = dict(optimizer=dict(lr=0.01))
param_scheduler = [
dict(
type='LinearLR', start_factor=0.001, by_epoch=False, begin=0, end=500),
dict(
type='MultiStepLR',
begin=0,
end=8,
by_epoch=True,
milestones=[7],
gamma=0.1)
]
train_cfg = dict(max_epochs=8)
default_hooks = dict(logger=dict(interval=100)),
5、使用预训练模型
为了使用预训练模型,新配置在load_from. 用户可能需要在训练前下载模型权重,以避免训练期间的下载时间。
load_from = 'https://download.openmmlab.com/mmdetection/v2.0/mask_rcnn/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco/mask_rcnn_r50_caffe_fpn_mstrain-poly_3x_coco_bbox_mAP-0.408__segm_mAP-0.37_20200504_163245-42aa3d00.pth'
5、测试结果提交
1、全景分割测试结果提交
以下部分介绍如何在 COCO 测试开发集上生成全景分割模型的预测结果,并将预测结果提交给COCO 评估服务器。
下载COCO test dataset images , testing image info , and panoptic train/val annotations,然后解压,把’test2017’放到data/coco/,把json文件和标注文件放到data/coco/annotations/.
mkdir -pv data/coco/
wget -P data/coco/ http://images.cocodataset.org/zips/test2017.zip
wget -P data/coco/ http://images.cocodataset.org/annotations/image_info_test2017.zip
wget -P data/coco/ http://images.cocodataset.org/annotations/panoptic_annotations_trainval2017.zip
unzip data/coco/test2017.zip -d data/coco/
unzip data/coco/image_info_test2017.zip -d data/coco/
unzip data/coco/panoptic_annotations_trainval2017.zip -d data/coco/
rm -rf data/coco/test2017.zip data/coco/image_info_test2017.zip data/coco/panoptic_annotations_trainval2017.zip
运行以下代码以更新测试图像信息中的类别信息。由于isthing’image_info_test-dev2017.json’的类别信息中缺少该属性,我们需要使用’panoptic_val2017.json’中的类别信息更新它。
python tools/misc/gen_coco_panoptic_test_info.py data/coco/annotations
完成以上准备后,你的目录结构data应该是这样的:
data
-- coco
|-- annotations
| |-- image_info_test-dev2017.json
| |-- image_info_test2017.json
| |-- panoptic_image_info_test-dev2017.json
| |-- panoptic_train2017.json
| |-- panoptic_train2017.zip
| |-- panoptic_val2017.json
| -- panoptic_val2017.zip
`-- test2017
对 coco test-dev 的推断
要对 coco test-dev 进行推理,我们应该首先更新test_datalodert 和设置test_evaluator。有两种方法可以做到这一点: 1. 在配置文件中更新它们;2. 在t命令t行中更新它们。
在配置文件中更新它们
相关设置在文末提供configs/ base/datasets/coco_panoptic.py,如下。
test_dataloader = dict(
batch_size=1,
num_workers=1,
persistent_workers=True,
drop_last=False,
sampler=dict(type='DefaultSampler', shuffle=False),
dataset=dict(
type=dataset_type,
data_root=data_root,
ann_file='annotations/panoptic_image_info_test-dev2017.json',
data_prefix=dict(img='test2017/'),
test_mode=True,
pipeline=test_pipeline))
test_evaluator = dict(
type='CocoPanopticMetric',
format_only=True,
ann_file=data_root + 'annotations/panoptic_image_info_test-dev2017.json',
outfile_prefix='./work_dirs/coco_panoptic/test')
以下任何一种方式都可用于更新 coco test-dev 集上的推理设置。
情况一:直接取消注释中的设置configs/ base/datasets/coco_panoptic.py。
情况 2:将以下设置复制到您现在使用的配置文件中。
test_dataloader = dict(
dataset=dict(
ann_file='annotations/panoptic_image_info_test-dev2017.json',
data_prefix=dict(img='test2017/', _delete_=True)))
test_evaluator = dict(
format_only=True,
ann_file=data_root + 'annotations/panoptic_image_info_test-dev2017.json',
outfile_prefix='./work_dirs/coco_panoptic/test')
然后通过以下命令推断 coco test-dev et。
python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE}
在命令行中更新它们
在coco test-dev上更新相关设置和推断的命令如下。
CUDA_VISIBLE_DEVICES=0 python tools/test.py \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
--cfg-options \
test_dataloader.dataset.ann_file=annotations/panoptic_image_info_test-dev2017.json \
test_dataloader.dataset.data_prefix.img=test2017 \
test_dataloader.dataset.data_prefix._delete_=True \
test_evaluator.format_only=True \
test_evaluator.ann_file=data/coco/annotations/panoptic_image_info_test-dev2017.json \
test_evaluator.outfile_prefix=${WORK_DIR}/results
CUDA_VISIBLE_DEVICES=0,1,3,4 bash tools/dist_test.sh \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
8 \
--cfg-options \
test_dataloader.dataset.ann_file=annotations/panoptic_image_info_test-dev2017.json \
test_dataloader.dataset.data_prefix.img=test2017 \
test_dataloader.dataset.data_prefix._delete_=True \
test_evaluator.format_only=True \
test_evaluator.ann_file=data/coco/annotations/panoptic_image_info_test-dev2017.json \
test_evaluator.outfile_prefix=${WORK_DIR}/results
GPUS=8 tools/slurm_test.sh \
${Partition} \
${JOB_NAME} \
${CONFIG_FILE} \
${CHECKPOINT_FILE} \
--cfg-options \
test_dataloader.dataset.ann_file=annotations/panoptic_image_info_test-dev2017.json \
test_dataloader.dataset.data_prefix.img=test2017 \
test_dataloader.dataset.data_prefix._delete_=True \
test_evaluator.format_only=True \
test_evaluator.ann_file=data/coco/annotations/panoptic_image_info_test-dev2017.json \
test_evaluator.outfile_prefix=${WORK_DIR}/results
例子
假设我们test2017使用带有 ResNet-50 主干的预训练 MaskFormer 进行推理。
CUDA_VISIBLE_DEVICES=0 python tools/test.py \
configs/maskformer/maskformer_r50_mstrain_16x1_75e_coco.py \
checkpoints/maskformer_r50_mstrain_16x1_75e_coco_20220221_141956-bc2699cb.pth \
--cfg-options \
test_dataloader.dataset.ann_file=annotations/panoptic_image_info_test-dev2017.json \
test_dataloader.dataset.data_prefix.img=test2017 \
test_dataloader.dataset.data_prefix._delete_=True \
test_evaluator.format_only=True \
test_evaluator.ann_file=data/coco/annotations/panoptic_image_info_test-dev2017.json \
test_evaluator.outfile_prefix=work_dirs/maskformer/results
重命名文件和压缩结果
推理后,全景分割结果(一个json文件和一个存放masks的目录)将在WORK_DIR. 我们应该按照COCO 网站上描述的命名规范来重命名它们。最后,我们需要将json和masks所在的目录压缩成一个zip文件,并按照命名约定重命名zip文件。请注意,zip 文件应直接包含上述两个文件。
重命名文件和压缩结果的命令:
cd ${WORK_DIR}
mv ./panoptic ./panoptic_test-dev2017_[algorithm_name]_results
mv ./results.panoptic.json ./panoptic_test-dev2017_[algorithm_name]_results.json
zip panoptic_test-dev2017_[algorithm_name]_results.zip -ur panoptic_test-dev2017_[algorithm_name]_results panoptic_test-dev2017_[algorithm_name]_results.json
6、权重初始化
在训练过程中,适当的初始化策略有利于加快训练速度或获得更高的性能。MMCV提供了一些常用的初始化模块的方法,例如nn.Conv2d. MMdetection中的模型初始化主要使用init_cfg. 用户可以通过以下两个步骤初始化模型:
Define init_cfg for a model or its components in model_cfg, but init_cfg of children components have higher priority and will override init_cfg of parents modules.
像往常一样构建模型,但model.init_weights()显式调用方法,模型参数将被初始化为配置。
MMdetection 中初始化的高级工作流程是:
model_cfg(init_cfg) -> build_from_cfg -> model -> init_weight() -> initialize(self, self.init_cfg) -> children’s init_weight()
1、描述
它是 dict 或 list[dict],包含以下键和值:
type(str),在 中包含初始值设定项名称INTIALIZERS,后跟初始值设定项的参数。
layer(str 或 list[str]),包含 Pytorch 或 MMCV 中的基本层的名称,其中包含将被初始化的可学习参数,例如’Conv2d’, ‘DeformConv2d’.
override(dict or list[dict]),包含不继承自BaseModule且初始化配置与’layer’key中其他层不同的子模块。中定义的初始化type器将对所有层中定义的层起作用layer,因此如果子模块不是派生类,BaseModule但可以像层中相同的方式初始化layer,则不需要使用override。override包含:
type接着是初始化器的参数;
name指示将被初始化的子模块
2、初始化参数
从mmcv.runner.BaseModule or mmdet.models继承一个新模型,这里我们展示了一个 FooModel 的例子。
import torch.nn as nn
from mmcv.runner import BaseModule
class FooModel(BaseModule)
def __init__(self,
arg1,
arg2,
init_cfg=None):
super(FooModel, self).__init__(init_cfg)
...
Initialize model by using init_cfg directly in code
import torch.nn as nn
from mmcv.runner import BaseModule
class FooModel(BaseModule)
def __init__(self,
arg1,
arg2,
init_cfg=None):
super(FooModel, self).__init__(init_cfg)
...
init_cfg直接在代码中使用初始化模型
import torch.nn as nn
from mmcv.runner import BaseModule
class FooModel(BaseModule)
def __init__(self,
arg1,
arg2,
init_cfg=XXX):
super(FooModel, self).__init__(init_cfg)
init_cfg直接使用 inmmcv.Sequential或mmcv.ModuleList代码初始化模型
from mmcv.runner import BaseModulei, ModuleList
class FooModel(BaseModule)
def __init__(self,
arg1,
arg2,
init_cfg=None):
super(FooModel, self).__init__(init_cfg)
...
self.conv1 = ModuleList(init_cfg=XXX)
init_cfg在配置文件中使用初始化模型
model = dict(
...
model = dict(
type='FooModel',
arg1=XXX,
arg2=XXX,
init_cfg=XXX),
...
3、init_cfg 的使用
Initialize model by layer key
init_cfg = dict(type='Constant', layer=['Conv1d', 'Conv2d', 'Linear'], val=1)
定义layer具有不同配置的初始化层的键。
init_cfg = [dict(type='Constant', layer='Conv1d', val=1),
dict(type='Constant', layer='Conv2d', val=2),
dict(type='Constant', layer='Linear', val=3)]
Initialize model by override key
init_cfg = dict(type='Constant',
layer=['Conv1d','Conv2d'], val=1, bias=2,
override=dict(type='Constant', name='reg', val=3, bias=4))
如果layerinit_cfg中为None,则只初始化override中同名的子模块,override中的type等参数可以省略。
init_cfg = dict(type='Constant', val=1, bias=2, override=dict(name='reg'))
如果我们不定义layer键或override键,它不会初始化任何东西。
无效用法
init_cfg = dict(type='Constant', layer=['Conv1d','Conv2d'], val=1, bias=2,
override=dict(type='Constant', val=3, bias=4))
init_cfg = dict(type='Constant', layer=['Conv1d','Conv2d'], val=1, bias=2,
override=dict(name='reg', val=3, bias=4))
使用预训练模型初始化模型
init_cfg = dict(type='Pretrained',
checkpoint='torchvision://resnet50')
5、半监督目标检测
半监督对象检测使用标记数据和未标记数据进行训练。它不仅减轻了训练高性能目标检测器的标注负担,而且通过使用大量未标记数据进一步改进了目标检测器。
训练半监督目标检测器的典型过程如下:
准备和拆分数据集
配置多分支流水线
配置半监督数据加载器
配置半监督模型
配置 MeanTeacherHook
配置 TeacherStudentValLoop
1 准备和拆分数据集
我们提供数据集下载脚本,默认下载coco2017数据集并自动解压。
python tools/misc/download_dataset.py
解压后的数据集目录结构如下:
mmdetection
├── data
│ ├── coco
│ │ ├── annotations
│ │ │ ├── image_info_unlabeled2017.json
│ │ │ ├── instances_train2017.json
│ │ │ ├── instances_val2017.json
│ │ ├── test2017
│ │ ├── train2017
│ │ ├── unlabeled2017
│ │ ├── val2017
coco2017数据集上的半监督目标检测有两种常见的实验设置:
train2017按照固定比例(1%、2%、5%和10% )拆分为标记数据集,其余train2017为未标记数据集。由于train2017标记数据集的不同拆分会导致半监督检测器的准确性出现显着波动,因此在实践中使用五折交叉验证来评估算法。我们提供数据集分割脚本:
python tools/misc/split_coco.py
默认情况下,脚本会train2017按照标注数据比例1%、2%、5%和10%进行拆分,每次拆分随机重复5次进行交叉验证。生成的半监督标注文件名格式如下:
标注数据集名称格式:instances_train2017.{fold}@{percent}.json
未标注数据集名称格式:instances_train2017.{fold}@{percent}-unlabeled.json
这里,fold用于交叉验证,percent表示标记数据的比例。分割后的数据集目录结构如下:
mmdetection
├── data
│ ├── coco
│ │ ├── annotations
│ │ │ ├── image_info_unlabeled2017.json
│ │ │ ├── instances_train2017.json
│ │ │ ├── instances_val2017.json
│ │ ├── semi_anns
│ │ │ ├── instances_train2017.1@1.json
│ │ │ ├── instances_train2017.1@1-unlabeled.json
│ │ │ ├── instances_train2017.1@2.json
│ │ │ ├── instances_train2017.1@2-unlabeled.json
│ │ │ ├── instances_train2017.1@5.json
│ │ │ ├── instances_train2017.1@5-unlabeled.json
│ │ │ ├── instances_train2017.1@10.json
│ │ │ ├── instances_train2017.1@10-unlabeled.json
│ │ │ ├── instances_train2017.2@1.json
│ │ │ ├── instances_train2017.2@1-unlabeled.json
│ │ ├── test2017
│ │ ├── train2017
│ │ ├── unlabeled2017
│ │ ├── val2017
(2) train2017和unlabeled2017作为有标签数据集无标签数据集使用。由于image_info_unlabeled2017.json不包含categories信息,CocoDataset无法初始化,所以需要将categories of instances_train2017.json写入image_info_unlabeled2017.json保存为instances_unlabeled2017.json,相关脚本如下
from mmengine.fileio import load, dump
anns_train = load('instances_train2017.json')
anns_unlabeled = load('image_info_unlabeled2017.json')
anns_unlabeled['categories'] = anns_train['categories']
dump(anns_unlabeled, 'instances_unlabeled2017.json')
处理后的数据集目录如下:
mmdetection
├── data
│ ├── coco
│ │ ├── annotations
│ │ │ ├── image_info_unlabeled2017.json
│ │ │ ├── instances_train2017.json
│ │ │ ├── instances_unlabeled2017.json
│ │ │ ├── instances_val2017.json
│ │ ├── test2017
│ │ ├── train2017
│ │ ├── unlabeled2017
│ │ ├── val2017
2 配置多分支流水线
半监督学习有两种主要方法, 一致性正则化 和伪标签。一致性正则化通常需要一些精心设计,而伪标签具有更简单的形式并且更容易扩展到下游任务。我们采用了基于伪标签的师生联合训练半监督目标检测框架,因此有标签数据和无标签数据需要配置不同的数据管道:
(1) Pipeline for labeled data:
sup_pipeline = [
dict(type='LoadImageFromFile', file_client_args=file_client_args),
dict(type='LoadAnnotations', with_bbox=True),
dict(type='RandomResize', scale=scale, keep_ratio=True),
dict(type='RandomFlip', prob=0.5),
dict(type='RandAugment', aug_space=color_space, aug_num=1),
dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)),
dict(type='MultiBranch', sup=dict(type='PackDetInputs'))
]
(2) Pipeline for unlabeled data:
weak_pipeline = [
dict(type='RandomResize', scale=scale, keep_ratio=True),
dict(type='RandomFlip', prob=0.5),
dict(
type='PackDetInputs',
meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
'scale_factor', 'flip', 'flip_direction',
'homography_matrix')),
]
strong_pipeline = [
dict(type='RandomResize', scale=scale, keep_ratio=True),
dict(type='RandomFlip', prob=0.5),
dict(
type='RandomOrder',
transforms=[
dict(type='RandAugment', aug_space=color_space, aug_num=1),
dict(type='RandAugment', aug_space=geometric, aug_num=1),
]),
dict(type='RandomErasing', n_patches=(1, 5), ratio=(0, 0.2)),
dict(type='FilterAnnotations', min_gt_bbox_wh=(1e-2, 1e-2)),
dict(
type='PackDetInputs',
meta_keys=('img_id', 'img_path', 'ori_shape', 'img_shape',
'scale_factor', 'flip', 'flip_direction',
'homography_matrix')),
]
unsup_pipeline = [
dict(type='LoadImageFromFile', file_client_args=file_client_args),
dict(type='LoadEmptyAnnotations'),
dict(
type='MultiBranch',
unsup_teacher=weak_pipeline,
unsup_student=strong_pipeline,
)
]
3 配置半监督数据加载器
(1) 构建半监督数据集。用于ConcatDataset连接标记和未标记的数据集。
labeled_dataset = dict(
type=dataset_type,
data_root=data_root,
ann_file='annotations/instances_train2017.json',
data_prefix=dict(img='train2017/'),
filter_cfg=dict(filter_empty_gt=True, min_size=32),
pipeline=sup_pipeline)
unlabeled_dataset = dict(
type=dataset_type,
data_root=data_root,
ann_file='annotations/instances_unlabeled2017.json',
data_prefix=dict(img='unlabeled2017/'),
filter_cfg=dict(filter_empty_gt=False),
pipeline=unsup_pipeline)
train_dataloader = dict(
batch_size=batch_size,
num_workers=num_workers,
persistent_workers=True,
sampler=dict(
type='GroupMultiSourceSampler',
batch_size=batch_size,
source_ratio=[1, 4]),
dataset=dict(
type='ConcatDataset', datasets=[labeled_dataset, unlabeled_dataset]))
(2) 使用多源数据集采样器。用于GroupMultiSourceSampler从labeled_dataset和的批次中采样数据labeled_dataset,source_ratio控制批次中标记数据和未标记数据的比例。GroupMultiSourceSampler还确保同一批次中的图像具有相似的纵横比。如果您不需要保证批处理中图像的纵横比,您可以使用MultiSourceSampler. 的采样图GroupMultiSourceSampler如下:

sup=1000表示标注数据集的尺度为1000,sup_h=200表示标注数据集中纵横比大于等于1sup_w=800的图像的尺度为200,表示纵横比小于1的图像的尺度在有标签的数据集中为800, unsup=9000表示无标签数据集的尺度为9000,unsup_h=1800表示无标签数据集中纵横比大于等于1的图像的尺度为1800,unsup_w=7200表示有的图像的尺度为未标记数据集中小于 1 的纵横比为 7200。 GroupMultiSourceSampler根据标记数据集和未标记数据集中图像的整体纵横比分布随机选择一组,然后根据 对两个数据集进行数据采样以形成批次source_ratio,因此标记数据集和未标记数据集具有不同的重复。
3 配置半监督模型
我们选择Faster R-CNN进行半监督训练。以SoftTeacher 半监督目标检测算法为例,模型配置可以继承自_base_/models/faster-rcnn_r50_fpn.py,replacing the backbone network of the detector with caffe style。请注意,与监督训练配置不同,Faster R-CNN as detector is an attribute of model。此外,data_preprocessor needs to be set to MultiBranchDataPreprocessor,用于对来自不同管道的图像进行填充和归一化。最后,可以通过semi_train_cfg and semi_test_cfg和配置半监督训练和测试所需的参数。
We choose Faster R-CNN as detector for semi-supervised training. Take the semi-supervised object detection algorithm SoftTeacher as an example, the model configuration can be inherited from base/models/faster-rcnn_r50_fpn.py, replacing the backbone network of the detector with caffe style. Note that unlike the supervised training configs, Faster R-CNN as detector is an attribute of model, not model . In addition, data_preprocessor needs to be set to MultiBranchDataPreprocessor, which is used to pad and normalize images from different pipelines. Finally, parameters required for semi-supervised training and testing can be configured via semi_train_cfg and semi_test_cfg.
_base_ = [
'../_base_/models/faster-rcnn_r50_fpn.py', '../_base_/default_runtime.py',
'../_base_/datasets/semi_coco_detection.py'
]
detector = _base_.model
detector.data_preprocessor = dict(
type='DetDataPreprocessor',
mean=[103.530, 116.280, 123.675],
std=[1.0, 1.0, 1.0],
bgr_to_rgb=False,
pad_size_divisor=32)
detector.backbone = dict(
type='ResNet',
depth=50,
num_stages=4,
out_indices=(0, 1, 2, 3),
frozen_stages=1,
norm_cfg=dict(type='BN', requires_grad=False),
norm_eval=True,
style='caffe',
init_cfg=dict(
type='Pretrained',
checkpoint='open-mmlab://detectron2/resnet50_caffe'))
model = dict(
_delete_=True,
type='SoftTeacher',
detector=detector,
data_preprocessor=dict(
type='MultiBranchDataPreprocessor',
data_preprocessor=detector.data_preprocessor),
semi_train_cfg=dict(
freeze_teacher=True,
sup_weight=1.0,
unsup_weight=4.0,
pseudo_label_initial_score_thr=0.5,
rpn_pseudo_thr=0.9,
cls_pseudo_thr=0.9,
reg_pseudo_thr=0.02,
jitter_times=10,
jitter_scale=0.06,
min_pseudo_bbox_wh=(1e-2, 1e-2)),
semi_test_cfg=dict(predict_on='teacher'))
In addition, we also support semi-supervised training for other detection models, such as RetinaNet and Cascade R-CNN. Since SoftTeacher only supports Faster R-CNN, it needs to be replaced with SemiBaseDetector, example is as below:
_base_ = [
'../_base_/models/retinanet_r50_fpn.py', '../_base_/default_runtime.py',
'../_base_/datasets/semi_coco_detection.py'
]
detector = _base_.model
model = dict(
_delete_=True,
type='SemiBaseDetector',
detector=detector,
data_preprocessor=dict(
type='MultiBranchDataPreprocessor',
data_preprocessor=detector.data_preprocessor),
semi_train_cfg=dict(
freeze_teacher=True,
sup_weight=1.0,
unsup_weight=1.0,
cls_pseudo_thr=0.9,
min_pseudo_bbox_wh=(1e-2, 1e-2)),
semi_test_cfg=dict(predict_on='teacher'))
Following the semi-supervised training configuration of SoftTeacher, change batch_size to 2 and source_ratio to [1, 1], the experimental results of supervised and semi-supervised training of RetinaNet, Faster R-CNN, Cascade R-CNN and SoftTeacher on the 10% coco train2017 are as below:
Model Detector BackBone Style sup-0.1-coco mAP semi-0.1-coco mAP
SemiBaseDetector RetinaNet R-50-FPN caffe 23.5 27.7
SemiBaseDetector Faster R-CNN R-50-FPN caffe 26.7 28.4
SemiBaseDetector Cascade R-CNN R-50-FPN caffe 28.0 29.7
SoftTeacher Faster R-CNN R-50-FPN caffe 26.7 31.1
4 配置 MeanTeacherHook
通常,教师模型通过学生模型的指数移动平均(EMA)更新,然后教师模型随着学生模型的优化而优化,这可以通过配置来实现custom_hooks:
custom_hooks = [dict(type='MeanTeacherHook')]
5 配置 TeacherStudentValLoop
由于师生联合训练框架中有两个模型,我们可以替换ValLoop为TeacherStudentValLoop来测试两个模型在训练过程中的准确率。
val_cfg = dict(type='TeacherStudentValLoop')
6、Swin-Transformer-Object-Detection模型测试
4.1 带有掩膜信息的swin_transform测试
python demo/image_demo.py demo/demo.jpg configs/swin/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco.py mask_rcnn_swin_tiny_patch4_window7.pth
成功的话 能看到实例图片,当 mask_rcnn_swin_tiny_patch4_window7.pth 不在项目根目录下的时候,需要在前面指定具体位置。

4.2 不带有掩膜信息的swin_transform测试
demo/image_demo.py 做如下修改:
result = inference_detector(model, args.img)
new_result = result[0]
show_result_pyplot(model, args.img, new_result, score_thr=args.score_thr)
python demo/image_detection_demo.py demo/demo.jpg configs/swin/mask_rcnn_swin_tiny_patch4_window7_mstrain_480-800_adamw_3x_coco.py mask_rcnn_swin_tiny_patch4_window7.pth

**
4.3 问题解决:
TypeError: SwinTransformer: init() got an unexpected keyword argument ’embed_dim’
**
4.4 原因:
在不同目录下它寻找的mmdet包不同
在swin_master/(你的项目)目录下它会寻找该项目内本来包含的mmdet文件夹
但是在swin_master/tools文件夹下,它会寻找openmmlab环境中的mmdet
4.5解决
设置环境变量,指定它去该目录下寻找mmdet包
进入配置信息 sudo vi /etc/profile
export PYTHONPATH= export PYTHONPATH=/media/lhy/Swin-Transformer-Object-Detection
(包含mmdet文件夹的你的项目路径)
7、tools/目录下其他有用的工具。
除了培训/测试脚本,我们在tools/目录下提供了许多有用的工具。
1、 Log Analysis(日志分析)
tools/analysis_tools/analyze_logs.py 给出一个训练日志文件,绘制损失/mAP曲线。
Run pip install seaborn first to install the dependency.
python tools/analysis_tools/analyze_logs.py plot_curve [--keys ${KEYS}] [--title ${TITLE}] [--legend ${LEGEND}] [--backend ${BACKEND}] [--style ${STYLE}] [--out ${OUT_FILE}]

Examples:
Plot the classification loss of some run.
python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_cls --legend loss_cls
Plot the classification and regression loss of some run, and save the figure to a pdf.
python tools/analysis_tools/analyze_logs.py plot_curve log.json --keys loss_cls loss_bbox --out losses.pdf
Compare the bbox mAP of two runs in the same figure.
python tools/analysis_tools/analyze_logs.py plot_curve log1.json log2.json --keys bbox_mAP --legend run1 run2
Compute the average training speed.
python tools/analysis_tools/analyze_logs.py cal_train_time log.json [--include-outliers]
The output is expected to be like the following.
Original: https://blog.csdn.net/qq_41627642/article/details/124603457
Author: qq_41627642
Title: MMDeteceion之系列一(环境安装、模型测试、训练以及模型后处理工具)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/710015/
转载文章受原作者版权保护。转载请注明原作者出处!