

内容
1.背景介绍
2D视觉机器人指的是机器人通过2D相机提供的视觉信息,完成某些实际的功能。
下面以眼在手上标定为例:


上图中, 相机③被固定在 机械臂末端②, 标定板④即之后的工作平面,为了做手眼标定在工作平面上放一个标定板。
标定过程中 标定板④放在固定位置,由上图可知, 标定板④和 基底①的相对位置不变,然后通过示教器控制机械臂带着相机在不同的位姿下对 标定板④进行拍照,拍照的过程中保存当前拍到的标定板图片以及记录图片对应示教器上的世界坐标。
眼在手上标定的目的是求出 相机③坐标系到 机械臂末端②坐标系的变换矩阵。
①为什么需要 手眼标定?
假设以物体识别目标进行抓取为例,在 工作平面④上面有一个方形 物体⑤,装在机械臂末端上面的2D光学相机会对物体进行拍照捕捉,识别后的结果是给出当前 物体⑤在相机成像平面内的像素坐标,然后要用机械臂去抓取该 物体⑤。但得出的 物体⑤的坐标信息是以相机坐标系为基准的,而输入给机械臂的信息是以 机械臂基底①坐标系为基准的,这时候就需要将 物体⑤的坐标信息转换到以 机械臂基底①为基准的参数。
; 1.1 问题
PS:关于上面例子中的问题,不是本文的重点,是通过三个44的矩阵相乘得到物体⑤在基底坐标系下的坐标,后面的博文会记录(https://blog.csdn.net/qq_45445740/article/details/123567627?spm=1001.2014.3001.5501),这里暂时不提。之前我一直困惑为什么2D相机没有深度信息,是怎么得到z轴方向的参数的?
②为什么需要 相机标定*?
因为物体⑤在相机③中的坐标是在相机成像平面内的一个2维坐标信息,而上面说的三个44的矩阵相乘是3维的, 产生了新的问题:根据相机识别到物体的2维信息,如何转换为3维的目标信息?*
1.2 思路
相机标定是得到相机的内参矩阵和畸变系数。
相机的 内参矩阵:

其中, f表示焦距, cx表示使用像素来描述x轴方向焦距的长度, cy表示使用像素来描述y轴方向焦距的长度。一般来说, cx=w/2, cy=h/2,w表示相机拍摄照片的像素宽度,h表示像素高度。
根据视频中up主的思路,有了上面的相机内参矩阵,就可以得到角点在相机坐标系中的三维坐标。 前提:需要假设物体⑤在工作平面上,且物体有固定的厚度,也就保证了物体的上表面中所有的点在z轴方向上到相机的距离是相同的。

通过上面的公式求出X和Y。式中内参矩阵是标定得到已知的,Z是固定值,在代码中假设标定板放在世界坐标系中Z=0的平面上,x和y是角点的像素坐标也是已知值。
代码:https://blog.csdn.net/qq_45445740/article/details/122339711
; 2.操作流程
- ①将相机固定在机械臂末端,调整好焦距和曝光,固定好棋盘格标定板,控制机器臂在不同姿态下对标定板拍照,拍摄的每张照片都要保证整个标定板都在相机的视野内,至少13张标定图片。
- ②在程序中加载每张标定图片
- ③首先提取每张照片的角点,使用 cv::findChessboardCorners()函数提取角点,这里的角点专指的是标定板上的内角点,并且这些角点与标定板的边缘不接触。
CV_EXPORTS_W bool findChessboardCorners( InputArray image,
Size patternSize,
OutputArray corners,
int flags = CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE );
- ④为了提高标定精度,需要在初步提取的角点信息上进一步提取亚像素信息,降低相机标定偏差,使用 cv::find4QuadCornerSubpix()函数,这个方法是专门用来获取棋盘图上内角点的精确位置的。
CV_EXPORTS_W bool find4QuadCornerSubpix( InputArray img,
InputOutputArray corners,
Size region_size );
- ⑤检查识别到的角点方向是否一致。由于在建立棋盘格上的三维坐标系的时候,我们默认是从棋盘格左上角到右下角建立的,如果识别反了,则会有个别图片棋盘格识别的角点和输入的棋盘格三维坐标对应不上。
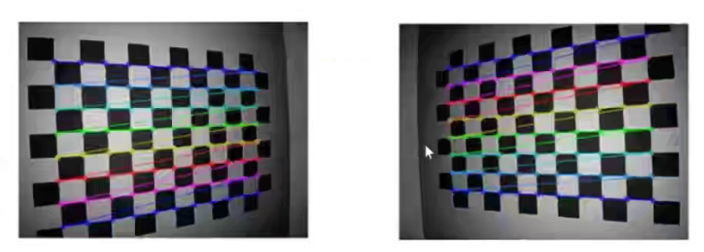
- ⑥在棋盘标定图上绘制找到的内角点(非必须,仅为了显示),使用 cv::drawChessboardCorners()函数。
CV_EXPORTS_W void drawChessboardCorners( InputOutputArray image,
Size patternSize,
InputArray corners,
bool patternWasFound );
- ⑦开始相机标定,准备好 cv::calibrateCamera()函数所需要的参数,因为第一个参数需要的是所有标定图片上所有检测到的角点在世界坐标系下的三维坐标,而这是2D相机,没有深度信息,所以我们假设标定板放在世界坐标系中 z=0 的平面上,即Z轴方向为0。
CV_EXPORTS_W double calibrateCamera( InputArrayOfArrays objectPoints,
InputArrayOfArrays imagePoints,
Size imageSize,
InputOutputArray cameraMatrix,
InputOutputArray distCoeffs,
OutputArrayOfArrays rvecs,
OutputArrayOfArrays tvecs,
int flags = 0, TermCriteria criteria = TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) );
- ⑧对相机标定的结果进行评价,方法是通过相机标定得到的摄像机内外参数,然后对空间的三维点进行重新投影计算,得到空间三维点在图像上新的投影点的坐标,通过 cv::projectPoints()函数计算得到新的二维投影点,然后通过 cv::norm()计算新的投影点和旧的投影点之间的偏差,偏差越小,标定结果越好。
CV_EXPORTS_W void projectPoints( InputArray objectPoints,
InputArray rvec,
InputArray tvec,
InputArray cameraMatrix,
InputArray distCoeffs,
OutputArray imagePoints,
OutputArray jacobian = noArray(),
double aspectRatio = 0 );
CV_EXPORTS_W double norm(InputArray src1,
InputArray src2,
int normType = NORM_L2,
InputArray mask = noArray());
- ⑨开始眼在手上的标定,通过 cv::calibrateHandEye()函数,四个输入,两个输出,其中R_gripper2base和t_gripper2base由示教器获得,即机械臂末端到机械人基底的旋转矩阵和平移向量;R_target2cam和t_target2cam可通过相机标定中的输出rvecs和tvecs得到。rvecs表示旋转向量,可通过cv::Rodrigues()将旋转向量转为旋转矩阵R_target2cam,tvecs就等于t_target2cam平移向量。
#include
cv::calibrateHandEye(InputArrayOfArrays R_gripper2base,
InputArrayOfArrays t_gripper2base,
InputArrayOfArrays R_target2cam,
InputArrayOfArrays t_target2cam,
OutputArray R_cam2gripper,
OutputArray t_cam2gripper,
HandEyeCalibrationMethod method = CALIB_HAND_EYE_TSAI
)
- ⑩最终得到R_cam2gripper和t_cam2gripper,拼接成相机到机械臂末端的变换矩阵。
关于手眼标定结果的应用:
https://blog.csdn.net/qq_45445740/article/details/123567627?spm=1001.2014.3001.5501
感谢视频讲解:https://www.bilibili.com/video/BV17K4y1u7iJ?spm_id_from=333.1007.top_right_bar_window_history.content.clickOriginal: https://blog.csdn.net/qq_45445740/article/details/123947559
Author: boss-dog
Title: (二)2D视觉机器人的手眼标定流程记录
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/702793/
转载文章受原作者版权保护。转载请注明原作者出处!