

SVD求解三维点集之间的变换矩阵
针对三维重建中的多点空间变换关系,通过最小二乘+SVD分解方法求解变换矩阵,即旋转+平移,旋转可能是绕x、y、z旋转不同角度的结果,常被应用于机械臂控制、三维重建、场景建模等方面。
参考– 视觉SLAM十四讲:
1.假设有一组配对好的3D点:


这个问题可以用迭代最近点(Iterative Closest Point,ICP)求解,主要有两种方式:SVD、非线性优化的方式
2.SVD方法建模:
2.1 首先,定义第 i 对匹配点的误差项:
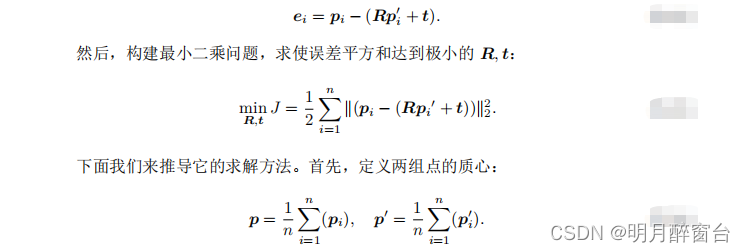
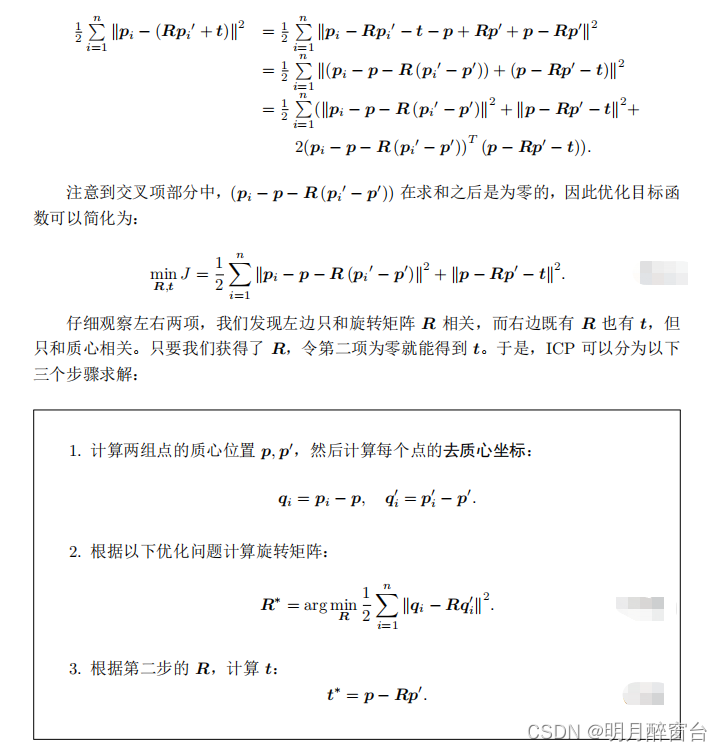
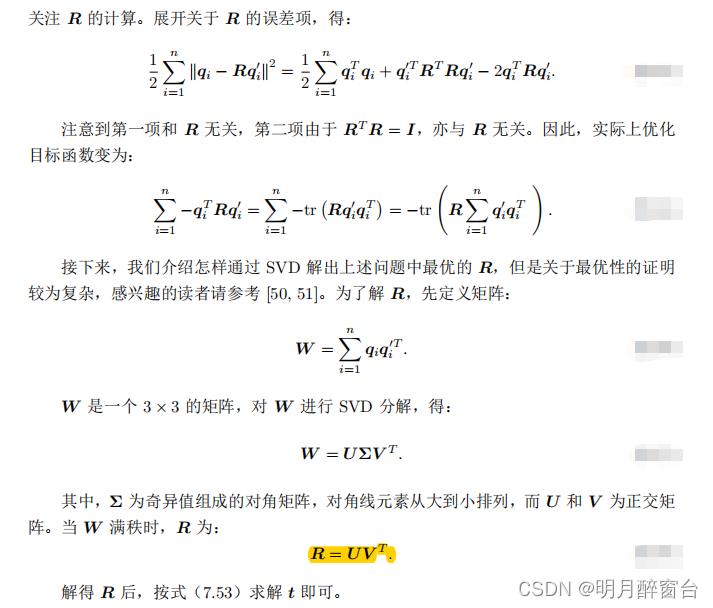
2.2 将重点定为旋转矩阵R的求解:
除此方法外,还可通过四元数法计算点集配准关系,具体参考:
Original: https://blog.csdn.net/yohnyang/article/details/124490587
Author: 明月醉窗台
Title: 三维重建(4)之SVD求解三维变换矩阵Rt(旋转+平移)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/701865/
转载文章受原作者版权保护。转载请注明原作者出处!