

文章目录
- 简介
- 1 加速度 Acceleration
- 2 陀螺仪 Gyroscope
- 3 欧拉角 Euler angles
- 4 磁场 Magnetic
- 5 四元数 Quaternion
- 6 时间
- 7 端口状态
- 补充知识
- Ref:
十轴加速度计陀螺仪模块姿态角度传感器倾角磁力计气压高度JY901B
简介
能够测量的数据信息主要包含以下几部分:
- 三轴加速度
- 三轴陀螺仪
- 三轴角度
- 三轴磁场
- 气压+高度
- 200Hz回传


信息精度及输出信息主要包括:
角度精度:动态 0.1 ° 0.1\degree 0 .1 ° 静态 0.05 ° 0.05\degree 0 .0 5 °
磁场精度:1 m g 1mg 1 m g
高度精度:0.5 0.5 0 .5
回传速率:0.1 H z 0.1Hz 0 .1 H z ~ 200 H z 200Hz 2 0 0 H z 可调
输出内容:加速度、陀螺仪、欧拉角、磁场、四元数、时间、端口状态
量程:加速度:± 16 g \pm 16g ±1 6 g,角速度:± 2000 ° / s \pm 2000\degree/s ±2 0 0 0 °/s,角度:± 180 ° \pm 180\degree ±1 8 0 °

; 1 加速度 Acceleration
加速度是速度变化量与发生这一变化所用时间的比值 Δ v / Δ t \Delta v / \Delta t Δv /Δt,是描述物体速度变化快慢的物理量,常用单位为 m / s 2 m/s^2 m /s 2 (米/平方秒)。
2 陀螺仪 Gyroscope
运动有六个自由度:沿三个正交方向平移和绕三个正交轴旋转。后三者用角速度传感器测量,也被称为陀螺仪(gyroscope或简称为gyro)。陀螺仪的基本原理是牛顿第二定律,就像加速度传感器。如果在牛顿方程中增加旋转,就会出现虚拟力,数学术语称之为科里奥利力。陀螺仪的工作原理是把旋转转换为科里奥利力。陀螺仪需要主运动或进给运动,科里奥利力是两种正交运动的结果,并且与二者正交。
3 欧拉角 Euler angles
欧拉角由三个数字组成,每个数字代表环绕一个坐标轴旋转的角度。欧拉角也有不同的写法跟表达方式。
欧拉角的旋转顺序不能随意改变,要注意描述时所参考的坐标系。本质上是因为:线性变换不满足乘法交换律。
4 磁场 Magnetic
高斯简称高,是 CGS 制中磁感应强度或磁通量的单位,为纪念德国数学家卡尔·弗里德里希·高斯而得名,常用符号 G G G 或 G s Gs G s 表示。
若放在磁感应强度均匀的磁场中,方向与磁感应强度方向垂直的长直导线在通有1电磁系单位(emu)的稳恒电流(等于10安培)时,在每厘米长度的导线受到电磁力为1达因,则该磁感应强度就定义为1高斯。
高斯和国际单位制中磁感应强度单位特斯拉(T)的换算关系为:
- 1 G = 1×10-4 T=0.1 mT
- 1 T = 10000 G
地球表面赤道上的磁场强度约为0.29~0.40高斯,而地磁北极的磁场强度为0.61高斯,地磁南极的磁场强度为0.68高斯。
5 四元数 Quaternion
单位四元数(Unit quaternion)可以用于表示三维空间裡的旋转。 它与常用的另外两种表示方式(三维正交矩阵和欧拉角)是等价的,但是避免了欧拉角表示法中的万向锁问题。 比起三维正交矩阵表示,四元数表示能够更方便地给出旋转的转轴与旋转角。
6 时间
7 端口状态
补充知识
; Ref:
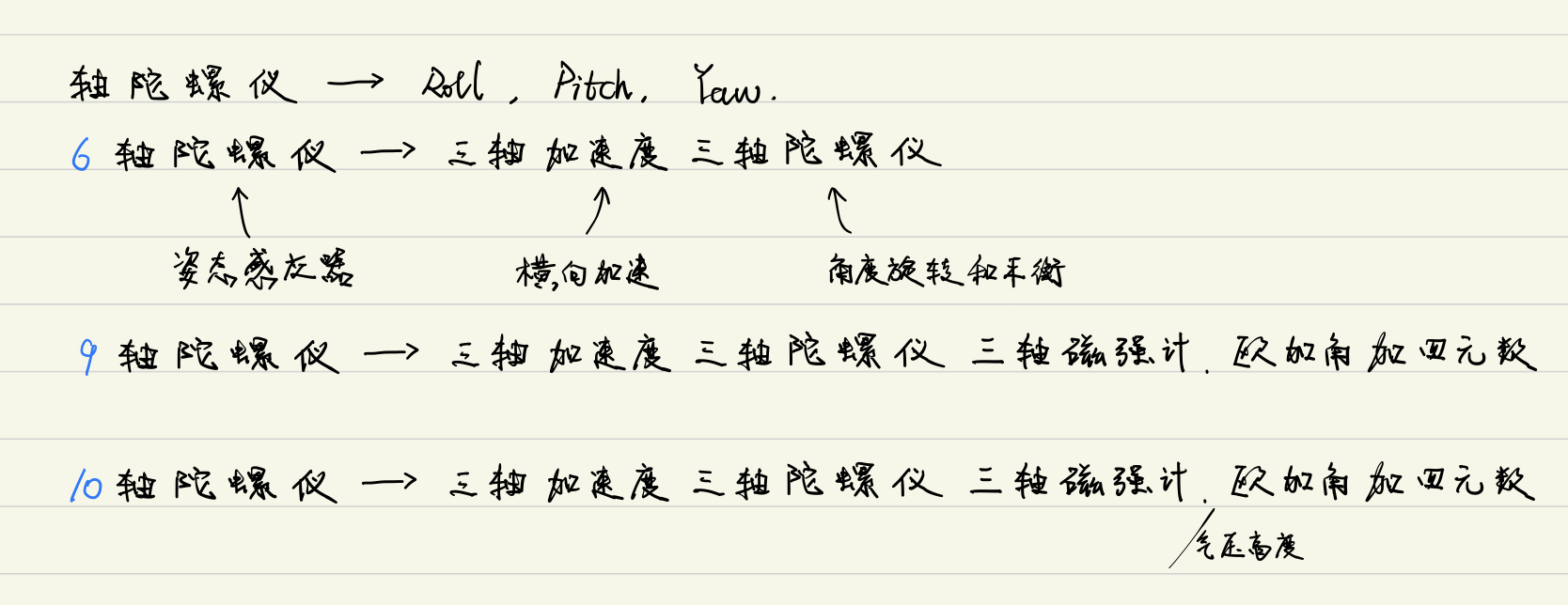
- 关于3、6、9、10轴姿态陀螺仪的区别与定义
- 陀螺仪
- 读懂陀螺仪传感器:导航、无人机以及永不会跌倒的车都离不开它!-知乎专栏
- 陀螺仪的数据处理-知乎专栏
- 加速度计、陀螺仪的工作原理和数据融合
- 回到基础——理解几何旋转与欧拉角
- 欧拉角的旋转顺序能改变吗?
- 如何通俗地解释欧拉角?之后为何要引入四元数?
- 磁场
- 三維旋轉表示法 – 歐拉角、旋轉矩陣、旋轉向量、四元數
- 如何形象地理解四元数?-知乎专栏
- 视觉SLAM中的数学基础 第二篇 四元数
Original: https://blog.csdn.net/weixin_36815313/article/details/121967072
Author: Zhao-Jichao
Title: 【UAV】陀螺仪数据分析,以维特智能 JY901B 为例
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/699102/
转载文章受原作者版权保护。转载请注明原作者出处!