

目标检测算法在交通场景中应用综述
摘要
总结目标检测算法发展与研究现状,one-step与two-step优缺点对比,以车、人、非机动车为目标,从传统检测方法、目标检测算法、目标检测算法优化、三维目标检测、多模态目标检测、重识别六个方面分别论述和总结。
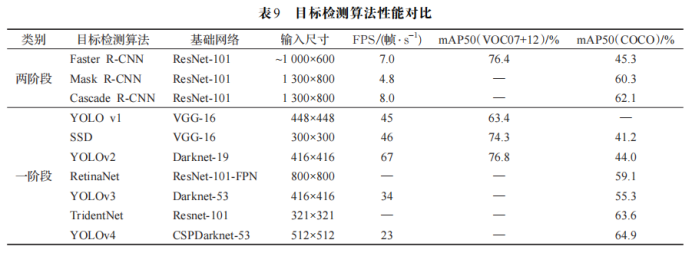
交通场景是目标检测领域热点,传统方法复杂、精度低,深度学习方法发展。目标检测分为基于候选区域(two-step)和基于回归(one-step)两类。前者通过子网络辅助生成候选边界框,后者直接在特征图上生成候选边界框。
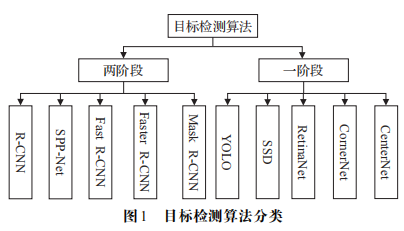

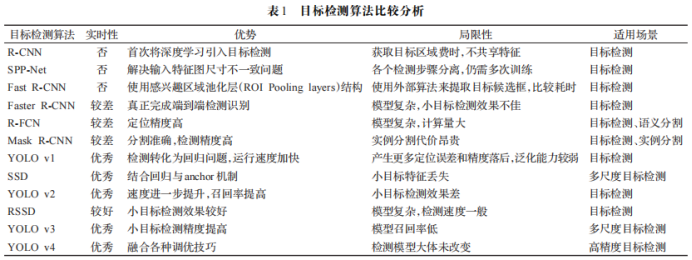
基于候选区域的算法检测速度普遍较慢,在交通场景中检测的实时性还不能满足,但检测精度在不断提升;基于回归的算法检测速度快、实时性较好,但是检测精度与准确度相对于两阶段的算法还是较差。
; 目标检测算法在交通场景中的应用
非机动车识别
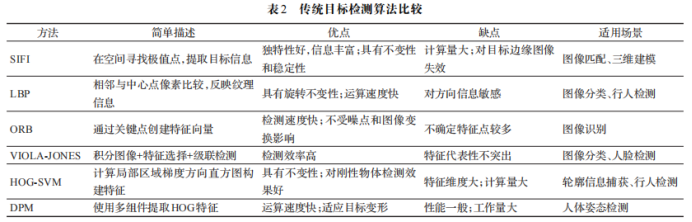
真实场景的应用需求,识别面临的困难、干扰,需要研究的问题。传统算法典型列举,鲁棒性差,窗口冗余,真实场景中特征难以提取,难以满足需求。
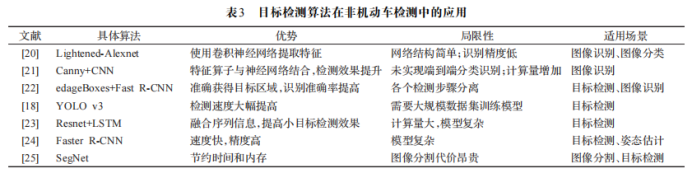
深度学习目标检测算法,神经网络发展,效果比传统方法好,单对小目标、遮挡物识别有困难。
- 小结:非机动车目标检测有难度,应研究小目标、多尺度问题。
; 机动车识别
主要难度是精度与实时性。传统算法依赖人工特征提取,有局限性。深度学习算法在硬件发展条件下占主导,应用广泛。
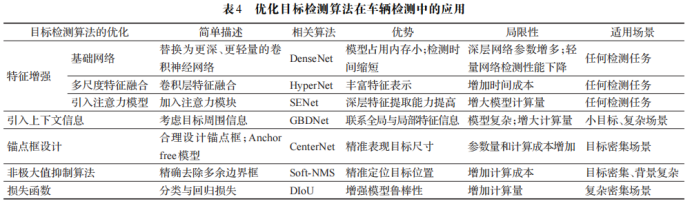
目标检测算法优化方向:特征增强、引入上下文信息、锚点框设计、非极大值抑制、损失函数。
- 特征增强:①基础网络优化,Resnet残差结构,DenseNet拼接不通层特征图,随着网络加深带来参数的增加是成倍的,因此采用深度可分离卷积、向量化卷积与通道及模块化卷积多种方式轻量化网络结构、减少参数量。②多尺度特征融合,将浅层特征与深层特征融合,提高鲁棒性。HyperNet算法融合多层卷积特征图,获得具有浅层几何信息和高层语义信息的Hyper特征图。FPN金字塔融合多尺度。图像金字塔尺度归一化SNIP,三种不同分辨率的输入图像,高分辨率检测小目标,中分辨率检测中目标,低分辨率检测大目标。提高检测率同时增大计算量。 ③引入注意力机制,分为空间注意力、通道注意力和空间通道混合注意力。
特征增强是目标检测算法优化的主流方法,是提升鲁棒性的关键。 - 引入上下文信息:融入目标附近的上下文信息有利于在复杂的背景中区分出目标物体,分为全局上下文信息和局部上下文信息。全局:ION网络、DeepID网络。局部:多尺度网络提取多尺度特征信息,引入上下文信息、空间记忆网络、双向门卷积网络GBDNet、CoupleNet网络。
有利于丰富特征表示、区分小目标,提高精度。 - 锚点框设计:基于候选区算法通过经验设计先验框大小比例,泛化能力差;设置密集候选框可以保证准确率,但计算量大。YOLO采用K-means算法生成候选框,GuidedAnchoring方法,通过图像特征指导先验候选框的生成。合理设计锚点框是目标准确定位的关键。
- 非极大值抑制NMS:通过交并比方式选择置信度最高的候选框,但IOU会出现漏检问题。Soft-NMS算法降低重叠大于阈值边界框的置信度提高模型召回率。Weight-NMS算法对坐标加权平均获得目标框。DIOU-NMS通过中心距离判别冗余框。去除多余边界框、精确定位目标。目标较大且稀疏、背景简单时,优化NMS对鲁棒性几乎没有改变,反之能提升检测性能。
- 损失函数:多使用分类和定位损失函数的加权求和。分类损失函数:Focal Loss、AP Loss、Class-Balanced Loss;定位损失函数:GHM-R Loss、IOU Loss、GIOU Loss、DIOU Loss。
只从目标检测模型本身出发实现算法太单一,效果提升不显著。 - 三维目标检测算法提高应用性,采用激光雷达与目标检测结合的方法。点云数据处理主要包括间接处理、直接处理和融合处理。
小结:目标检测算法优化可以提高精度,三维目标检测可以全面感知交通场景的目标信息,但成本高,对硬件要求高。
行人识别
- 多模态目标检测:复杂恶劣场景下采用多模态方式检测,采用不同传感器采集数据,融合信息监测识别目标。CIMDL方法输出两个模态信息和一个融合特征;改进的Faster R-CNN融合彩色图像和多光谱图像特征信息对行人识别;毫米波雷达与摄像机信息融合,利用时空同步关联多传感器数据,改进YOLOv2实现检测。采用多种传感器融合场景信息,避免单一模态感知信息缺陷,提高模型鲁棒性是目标检测发展的趋势。但多模态图像融合坐标配准困难、占用内存大且缺少相应数据集。
- 行人重识别:主要研究内容是判断某个摄像头中的某个行人是否曾经出现在其他的摄像头中,即需要将某个行人特征与其他行人特征进行对比,判断是否属于同一个行人。行人重识别主要是传统方法、强监督深度学习方法和无监督方法,行人重识别主要应用于刑侦工作、图像检索等方面。
小结:对于复杂、密集的场景识别效果差,识别遮挡行人仍是难点。
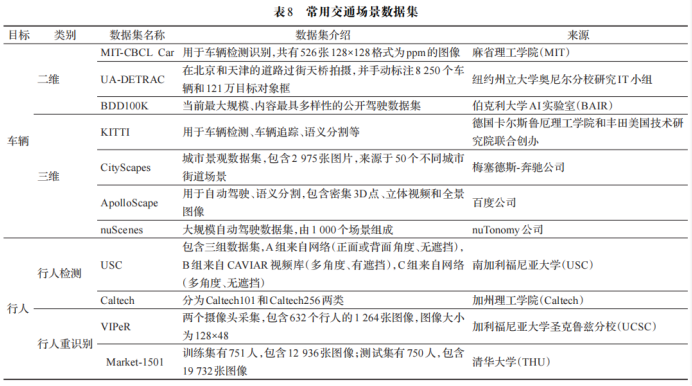
数据集及评价标准
目标检测数据集
评价标准
用标准有准确率、召回率、平均精确率和平均精确率均值。另外检测速度也是评价标准之一,衡量目标检测算法检测速度的标准为每秒帧率FPS,即每秒内处理图片的数量,一般来说,FPS 越大实时性越好。
总结:目标检测算法在机动车和行人检测识别上应用较多,在非机动车上应用较少。
研究趋势:更符合目标检测任务的特征提取网络。获得更丰富的图像语义信息。三维目标检测。多模态目标检测。弱监督目标检测模型。提高模型可解释性。
Original: https://blog.csdn.net/weixin_52820633/article/details/121054768
Author: ~不二~
Title: 【论文笔记】–目标检测算法在交通场景中应用综述
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/682574/
转载文章受原作者版权保护。转载请注明原作者出处!