

前言
到目前为止还没跑通,但是bug实在太多了,我的每一步都有错,如果不记录下来又会有遗漏,(肯定已经遗漏了很多),在这里把能想起来的都记录一下以便不时之需。另外,本人深度学习小白,一上来跑这么难的代码我大概是脑子进水了,如果有看到的话,十分欢迎且需要加微信跟我详细交流。以下纯属我个人理解,肯定有误差,仅为个人记录,请酌情参考。
9.29更新:能跑了能跑了,喜大普奔!!
10.1更新:evaluation出结果啦,准确率还真挺高!!
10.21更新:发现了之前几个疑惑的点的原因(写在最后)
10.25更新:补齐SFD方法简介。
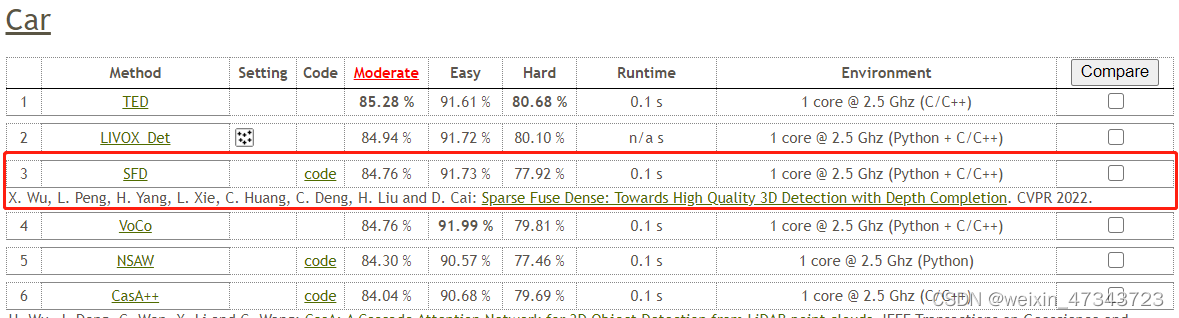
SFD简介
Sparse Fuse Dense: Towards High Quality 3D Detection with Depth Completion. CVPR 2022.
在kitti数据集上目前排名前三,文章通俗易懂(也可能是我没看懂)
(这部分后面再补吧)

文章贡献:
- 3D-GAF:融合点云和伪点云的网络
- SynAugment:针对SFD的数据增强方法
- CPConv:伪点云的特征提取器
Original: https://blog.csdn.net/weixin_47343723/article/details/127085409
Author: weixin_47343723
Title: 点云3D目标检测之——尝试SFD代码跑通(超详细!!)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/681436/
转载文章受原作者版权保护。转载请注明原作者出处!