

本文目录
- 简述
- 1.MMrotate下载
- 2.环境安装
- 3.自定义数据集制作
* - 3.1 roLabelImg 打标签
- 3.2 生成DOTA数据集格式的标签
- 3.3 数据集裁剪(split)
- 4.修改配置文件
- 5.训练并测试
- 6 公开数据集及对应代码下载网址
- 参考博客
简述
MMRotate 是一款基于 PyTorch 的旋转框检测的开源工具箱,是 OpenMMLab 项目的成员之一。里面包含了rcnn、faster rcnn、r3det等各种旋转目标的检测模型,适合于遥感图像领域的目标检测。
1.MMrotate下载
MMrotate包下载: 下载链接
目录结构如下:

; 2.环境安装
所需要的依赖环境:
Linux & Windows
Python 3.7+
PyTorch 1.6+
CUDA 9.2+
GCC 5+
mmcv-full 1.4.5+
mmdet 2.19.0+
安装流程:
conda create -n mmrotate python=3.7 -y
conda activate mmrotate
conda install pytorch==1.7.0 torchvision==0.8.0 cudatoolkit=10.1 -c pytorch
pip install mmcv-full -f https://download.openmmlab.com/mmcv/dist/cu101/torch1.7.0/index.html
pip install mmdet
cd mmrotate
pip install -r requirements/build.txt
pip install -v -e .
测试安装的环境是否正常:
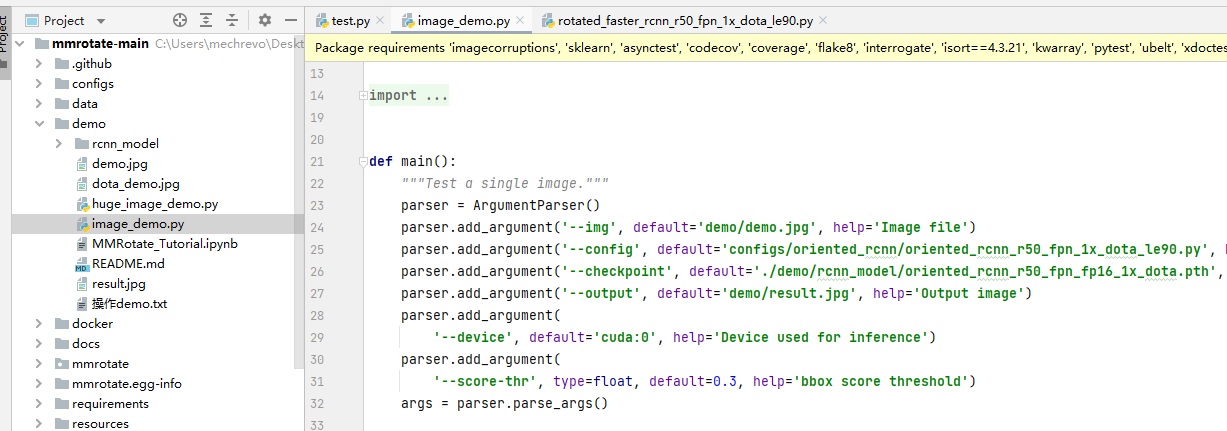
打开demo文件夹下的image_demo.py:修改相应的参数:
– -img : 测试的图片
– -config:选择测试的模型配置文件
– -checkpoint: 对应的预训练模型文件,可自行下载:MMrotate模型库 百度网盘连接:rcnn 权重 提取码:ur0b
– -output: 检测输出的图片
然后,执行并得到如下结果,说明环境安装正确:
python demo/image_demo.py

3.自定义数据集制作
要训练自己的模型,自定义数据集制作这部分其实是最麻烦的。MMrotate所使用的数据集格式是dota类型的,图片为.png格式且尺寸是 n×n 的(方形),不过不用担心,该项目中有相应的工具包可自动转换
DOTA的标签格式:
x1, y1, x2, y2, x3, y3, x4, y4, category: 目标名字 difficult:表示标签检测的难易程度 (1表示困难,0表示不困难)
x1,y1为左上角的坐标,然后顺时针排列4个坐标
3.1 roLabelImg 打标签
roLabelImg工具算是labelme的进阶版吧,它能把矩形框进行旋转,制作旋转目标的标签。操作时:A键 D键 Z键 X键 C键 V键 这几个常用快捷键用得多点
生成的xml标签文件如下:

其中相比普通的标签文件多了一个角度信息(angle),后续转为DOTA的标签时就是利用了该角度(这里强烈建议先看大佬的文章:旋转框的转换问题;),所以在用roLabelImg打标签时一定要注意三点:(1)roLabelImg中本身的角度是以框的w边 与x轴顺时针之间所形成的夹角为正角(2)旋转框的w边(初始水平边)始终旋转到与目标的长边重合(3)打标签时保证angle在[-90°,90°]间,。这种标注法原项目叫做”长边标注法”(le90),具体见下图:

至此,生成的目录结构如下:

3.2 生成DOTA数据集格式的标签
利用上一步中xml标签 转换为DOTA的标签,转换的代码(只需要给定3个路径参数就可以运行了):
import os
import xml.etree.ElementTree as ET
import math
import cv2 as cv
def voc_to_dota(xml_dir, xml_name, img_dir, savedImg_dir):
txt_name = xml_name[:-4] + '.txt'
txt_path = xml_dir + '/txt_label'
if not os.path.exists(txt_path):
os.makedirs(txt_path)
txt_file = os.path.join(txt_path, txt_name)
img_name = xml_name[:-4] + '.jpg'
img_path = os.path.join(img_dir, img_name)
img = cv.imread(img_path)
xml_file = os.path.join(xml_dir, xml_name)
tree = ET.parse(os.path.join(xml_file))
root = tree.getroot()
with open(txt_file, "w+", encoding='UTF-8') as out_file:
for obj in root.findall('object'):
name = obj.find('name').text
difficult = obj.find('difficult').text
robndbox = obj.find('robndbox')
cx = float(robndbox.find('cx').text)
cy = float(robndbox.find('cy').text)
w = float(robndbox.find('w').text)
h = float(robndbox.find('h').text)
angle = float(robndbox.find('angle').text)
p0x, p0y = rotatePoint(cx, cy, cx - w / 2, cy - h / 2, -angle)
p1x, p1y = rotatePoint(cx, cy, cx + w / 2, cy - h / 2, -angle)
p2x, p2y = rotatePoint(cx, cy, cx + w / 2, cy + h / 2, -angle)
p3x, p3y = rotatePoint(cx, cy, cx - w / 2, cy + h / 2, -angle)
dict = {p0y:p0x, p1y:p1x, p2y:p2x, p3y:p3x }
list = find_topLeftPopint(dict)
if list[0] == p0x:
list_xy = [p0x, p0y, p1x, p1y, p2x, p2y, p3x, p3y]
elif list[0] == p1x:
list_xy = [p1x, p1y, p2x, p2y, p3x, p3y, p0x, p0y]
elif list[0] == p2x:
list_xy = [p2x, p2y, p3x, p3y, p0x, p0y, p1x, p1y]
else:
list_xy = [p3x, p3y, p0x, p0y, p1x, p1y, p2x, p2y]
cv.line(img, (int(list_xy[0]), int(list_xy[1])), (int(list_xy[2]), int(list_xy[3])), color=(255, 0, 0), thickness= 3)
cv.line(img, (int(list_xy[2]), int(list_xy[3])), (int(list_xy[4]), int(list_xy[5])), color=(0, 255, 0), thickness= 3)
cv.line(img, (int(list_xy[4]), int(list_xy[5])), (int(list_xy[6]), int(list_xy[7])), color=(0, 0, 255), thickness= 2)
cv.line(img, (int(list_xy[6]), int(list_xy[7])), (int(list_xy[0]), int(list_xy[1])), color=(255, 255, 0), thickness= 2)
data = str(list_xy[0]) + " " + str(list_xy[1]) + " " + str(list_xy[2]) + " " + str(list_xy[3]) + " " + \
str(list_xy[4]) + " " + str(list_xy[5]) + " " + str(list_xy[6]) + " " + str(list_xy[7]) + " "
data = data + name + " " + difficult + "\n"
out_file.write(data)
if not os.path.exists(savedImg_dir):
os.makedirs(savedImg_dir)
out_img = os.path.join(savedImg_dir, xml_name[:-4]+'.jpg')
cv.imwrite(out_img, img)
def find_topLeftPopint(dict):
dict_keys = sorted(dict.keys())
temp = [dict[dict_keys[0]], dict[dict_keys[1]]]
minx = min(temp)
if minx == temp[0]:
miny = dict_keys[0]
else:
miny = dict_keys[1]
return [minx, miny]
def rotatePoint(xc, yc, xp, yp, theta):
xoff = xp - xc
yoff = yp - yc
cosTheta = math.cos(theta)
sinTheta = math.sin(theta)
pResx = cosTheta * xoff + sinTheta * yoff
pResy = - sinTheta * xoff + cosTheta * yoff
return float(format(xc + pResx, '.1f')), float(format(yc + pResy, '.1f'))
import argparse
def parse_args():
parser = argparse.ArgumentParser(description='数据格式转换')
parser.add_argument('--xml-dir', default='./buildings/train/label', help='original xml file dictionary')
parser.add_argument('--img-dir', default='./buildings/train', help='original image dictionary')
parser.add_argument('--outputImg-dir', default='./buildings/train/out', help='saved image dictionary after dealing ')
args = parser.parse_args()
return args
if __name__ == '__main__':
args = parse_args()
xml_path = args.xml_dir
xmlFile_list = os.listdir(xml_path)
print(xmlFile_list)
for i in range(0, len(xmlFile_list)):
if ('.xml' in xmlFile_list[i]) or ('.XML' in xmlFile_list[i]):
voc_to_dota(xml_path, xmlFile_list[i], args.img_dir, args.outputImg_dir)
print('----------------------------------------{}{}----------------------------------------'
.format(xmlFile_list[i], ' has Done!'))
else:
print(xmlFile_list[i] + ' is not xml file')
其中转换的原理就是基于大佬的知乎文章中转换矩阵,生成的DOTA标签格式如下:
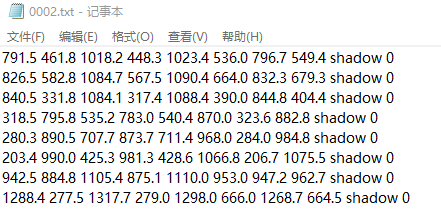
目前所得到文件夹结构如下:
images: 存放的.jpg图像(我只有200张)
xml: rolabelImg打的标签(这时已没啥用了,可删除)
txt_Label: 生成的DOTA标签
然后将上述数据集分成 train、test、val 、trainval等几部分以便于训练,其中每个部分的文件夹下都包含有 images(图像) 和 labels(对应的txt标签)
我这里是手动划分的:train 80%,test 10%,val 10%。
3.3 数据集裁剪(split)
然后将得到的 train、test、val 中的图片进行裁剪,裁剪的原因 是由于我的图像是1920×1080的矩形,而且也不是png格式的,所以找到:mmrotate-main/tools/data/dota/split/ 路径下img_split.py文件(裁剪脚本) 以及 mmrotate-main/tools/data/dota/split/split_configs/ 路径下的配置文件,其文件内容就是img_split.py的配置信息,我们需要修改其中的参数,让其加载上述的train、test、val中的图像及标签,并进行裁剪。
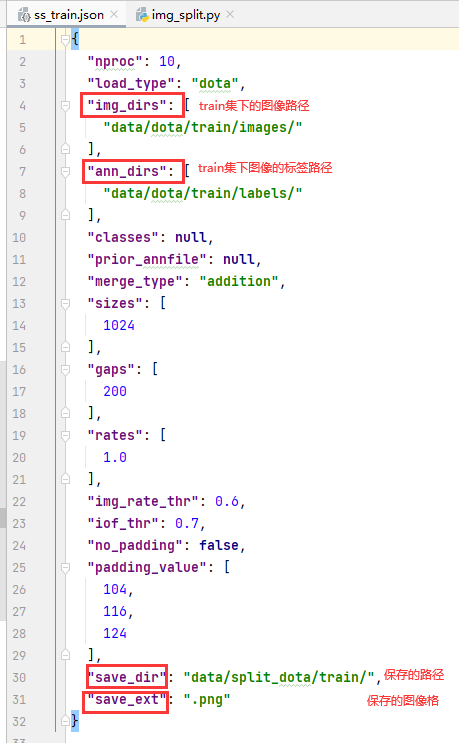
修改好上述几个关键的参数之后,即可运行img_split.py进行裁剪了:
python mmrotate-main/tools/data/dota/split/img_split.py --base_json mmrotate-main/tools/data/dota/split/split_configs/ss_train.json
其他 test、val、trainval数据集的裁剪同理,只需修改 – -base_json参数为对应的配置文件即可。
裁剪的结果:
4.修改配置文件
数据集准备好之后,接下来,需要修改训练相关的配置信息:主要就是 tools/tain.py 中的相关参数修改,train.py文件如下:

两个主要的参数: – -config: 使用的模型文件 (我使用的是 faster rcnn) ; – -work-dir:训练得到的模型及配置信息保存的路径
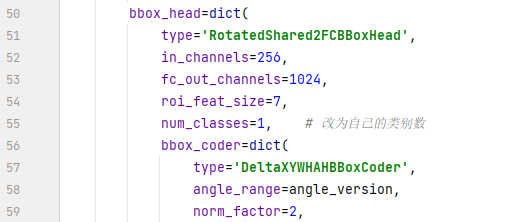
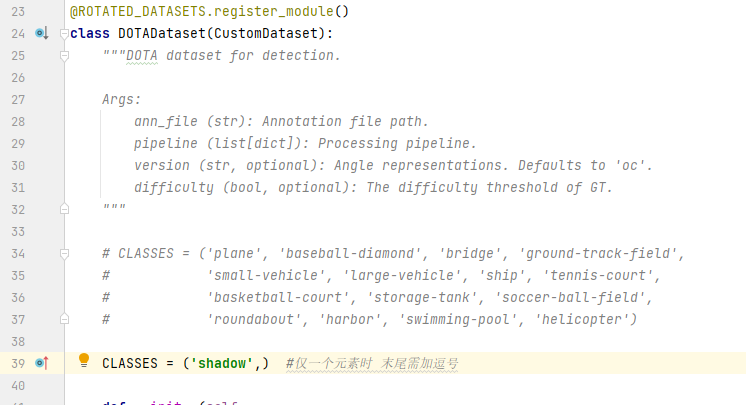
由于使用的模型是:rotated_faster_rcnn_r50_fpn_x1_dota_le90.py,在该文件中实现了:训练相关参数的配置,数据集信息的配置,以及faster-rcnn网络架构的搭建;打开该文件修改其中的目标类别数为自己数据集的类别数,我的类别为1, 所以修改:num_classes = 1,
同时,修改 mmrotate-main/mmrotate/datasets/dota.py 文件中的类别名字(CLASSES), 具体如下:
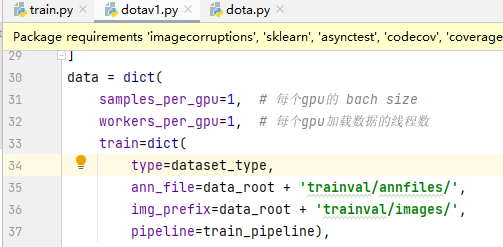
最后,修改训练使用的数据集路径:找到并打开 mmrotate-main/configs/ base/datasets/dotav1.py 文件,修改其中的 data_root 路径为自己裁剪的数据集路径,该路径包含了上述划分的train、test、val、trainval数据集,另外,dotav1.py文件中data下的train、val、test三个对象分别就是利用上述路径下对应类别的数据集,网络加载数据也是通过这三个对象中的路径去加载的,所以我们自己划分的数据集实质上只用到了:train数据集、trainval数据集、test数据集。(因为我有其他训练任务所以划分了4个),综上所述,数据集的划分完全可以根据这三个对象路径来划分就行,并不一定要和本文的一样,保证数据能正常加载训练即可。

; 5.训练并测试
一切准备就绪后 即可开始愉快的训练了!!!执行:
python tools/train.py
训练结果:
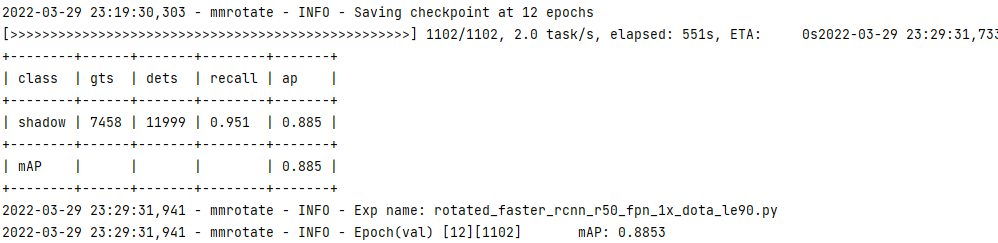
保存训练的结果在 run 目录下:

1 学习率,batch,num-worker,epoch,优化函数等 都是在configs/ base/下的文件内去修改
2 如果遇到 Cuda out of memory错误:可将 mmrotate-main/configs/ base/datasets/dotav1.py文件中的samples_per_gpu 和 workers_per_gpu 改小一点。
测试效果:

6 公开数据集及对应代码下载网址
比较全面的数据集网站: 根据关键词搜索基本上都能找到相关的数据集
参考博客
Original: https://blog.csdn.net/qq_43581224/article/details/123838415
Author: YD-阿三
Title: 基于MMRotate训练自定义数据集 做旋转目标检测 2022-3-30
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/669409/
转载文章受原作者版权保护。转载请注明原作者出处!