

ResNet是什么?解决了?
Residual net(残差网络):将靠前若干层的某一层数据输出直接跳过多层 引入到后面的数据层的输入部分;表明了后面的特征层的内容会有一部分由前面的某一层线性贡献。结构如下:


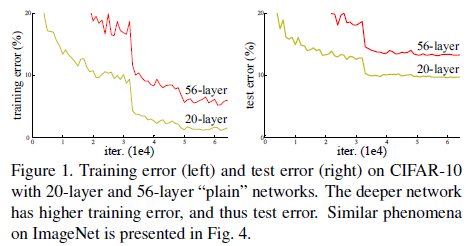
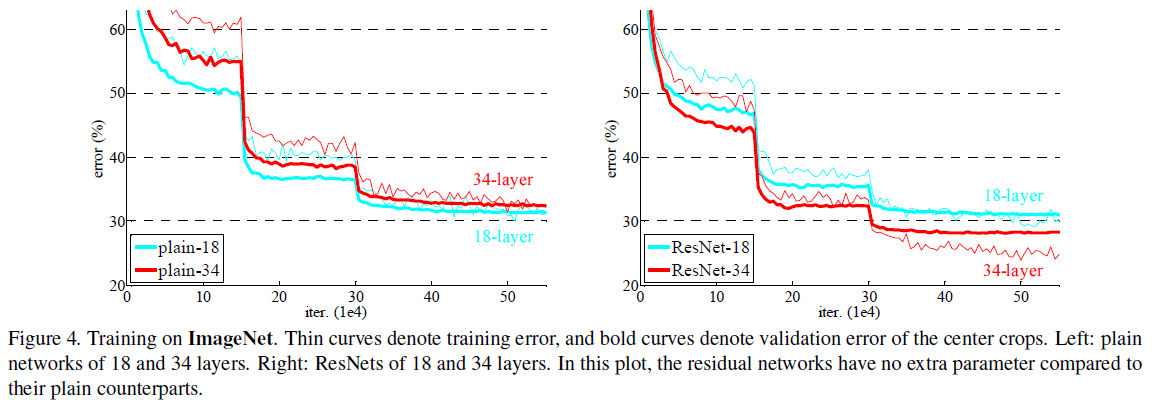
ResNet网络解决 深度网络退化问题。采用ResNet网络结构的网络层数越深,性能越佳;如下图一显示,56层的深度网络的训练误差和测试误差反而比20层网络更大,这就是深度网络退化;而图二展示了使用ResNet结构前后,34层网络与18层网络的训练结果对比;
ResNet原理及结构
假设我们想要网络块学习到的映射为H(x),而直接学习H(x)是很难学习到的。若我们学习另一个残差函数F(x) = H(x) – x可以很 容易学习,因为此时网络块的训练目标是 将F(x)逼近于0,而不是某一特定映射。因此,最后的映射H(x)就是将F(x)和x相加,H(x) = F(x) + x,如图所示。
因此,这个网络块的输出 y为
为了相加,必须保证加号左右侧维度相同,因此可写成通式如下,Ws用于匹配维度;
文中提到两种维度匹配的方式: (A)用zero-paddiing增加维度;(B)用1*1卷积增加维度;
在ResNet网络中,有两种基础块,分别是 BasicBlock和BotteNeck;前者用于ResNet34以下的网络,后者用于 ResNet50及以上的网络;
ResNet50
其包含两个基本块,分别叫做 Conv Block和 Identity Block,其中Conv块输入和输出维度是不一样的,所以不能连续串联,其用于改变网络的维度;Identity块输入维度和输出维度相同,可以串联,用于加深网络;
Conv Block

Identity Block

整体结构如下:

代码
resnet50.py
import torch
import torch.nn as nn
from torch.nn import functional as F
class ResNet50BasicBlock(nn.Module):
def __init__(self, in_channel, outs, kernerl_size, stride, padding):
super(ResNet50BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channel, outs[0], kernel_size=kernerl_size[0], stride=stride[0], padding=padding[0])
self.bn1 = nn.BatchNorm2d(outs[0])
self.conv2 = nn.Conv2d(outs[0], outs[1], kernel_size=kernerl_size[1], stride=stride[0], padding=padding[1])
self.bn2 = nn.BatchNorm2d(outs[1])
self.conv3 = nn.Conv2d(outs[1], outs[2], kernel_size=kernerl_size[2], stride=stride[0], padding=padding[2])
self.bn3 = nn.BatchNorm2d(outs[2])
def forward(self, x):
out = self.conv1(x)
out = F.relu(self.bn1(out))
out = self.conv2(out)
out = F.relu(self.bn2(out))
out = self.conv3(out)
out = self.bn3(out)
return F.relu(out + x)
class ResNet50DownBlock(nn.Module):
def __init__(self, in_channel, outs, kernel_size, stride, padding):
super(ResNet50DownBlock, self).__init__()
# out1, out2, out3 = outs
# print(outs)
self.conv1 = nn.Conv2d(in_channel, outs[0], kernel_size=kernel_size[0], stride=stride[0], padding=padding[0])
self.bn1 = nn.BatchNorm2d(outs[0])
self.conv2 = nn.Conv2d(outs[0], outs[1], kernel_size=kernel_size[1], stride=stride[1], padding=padding[1])
self.bn2 = nn.BatchNorm2d(outs[1])
self.conv3 = nn.Conv2d(outs[1], outs[2], kernel_size=kernel_size[2], stride=stride[2], padding=padding[2])
self.bn3 = nn.BatchNorm2d(outs[2])
self.extra = nn.Sequential(
nn.Conv2d(in_channel, outs[2], kernel_size=1, stride=stride[3], padding=0),
nn.BatchNorm2d(outs[2])
)
def forward(self, x):
x_shortcut = self.extra(x)
out = self.conv1(x)
out = self.bn1(out)
out = F.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = F.relu(out)
out = self.conv3(out)
out = self.bn3(out)
return F.relu(x_shortcut + out)
class ResNet50(nn.Module):
def __init__(self):
super(ResNet50, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = nn.Sequential(
ResNet50DownBlock(64, outs=[64, 64, 256], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0]),
ResNet50BasicBlock(256, outs=[64, 64, 256], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0]),
ResNet50BasicBlock(256, outs=[64, 64, 256], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0]),
)
self.layer2 = nn.Sequential(
ResNet50DownBlock(256, outs=[128, 128, 512], kernel_size=[1, 3, 1], stride=[1, 2, 1, 2], padding=[0, 1, 0]),
ResNet50BasicBlock(512, outs=[128, 128, 512], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0]),
ResNet50BasicBlock(512, outs=[128, 128, 512], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0]),
ResNet50DownBlock(512, outs=[128, 128, 512], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1], padding=[0, 1, 0])
)
self.layer3 = nn.Sequential(
ResNet50DownBlock(512, outs=[256, 256, 1024], kernel_size=[1, 3, 1], stride=[1, 2, 1, 2], padding=[0, 1, 0]),
ResNet50BasicBlock(1024, outs=[256, 256, 1024], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0]),
ResNet50BasicBlock(1024, outs=[256, 256, 1024], kernerl_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0]),
ResNet50DownBlock(1024, outs=[256, 256, 1024], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0]),
ResNet50DownBlock(1024, outs=[256, 256, 1024], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0]),
ResNet50DownBlock(1024, outs=[256, 256, 1024], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0])
)
self.layer4 = nn.Sequential(
ResNet50DownBlock(1024, outs=[512, 512, 2048], kernel_size=[1, 3, 1], stride=[1, 2, 1, 2],
padding=[0, 1, 0]),
ResNet50DownBlock(2048, outs=[512, 512, 2048], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0]),
ResNet50DownBlock(2048, outs=[512, 512, 2048], kernel_size=[1, 3, 1], stride=[1, 1, 1, 1],
padding=[0, 1, 0])
)
self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1, 1))
self.fc = nn.Linear(2048, 10)
def forward(self, x):
out = self.conv1(x)
out = self.maxpool(out)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = self.avgpool(out)
out = out.reshape(x.shape[0], -1)
out = self.fc(out)
return out
if __name__ == '__main__':
x = torch.randn(2, 3, 224, 224)
net = ResNet50()
out = net(x)
print('out.shape: ', out.shape)
print(out)
main.py
import torch
from torch import nn, optim
import torchvision.transforms as transforms
from torchvision import datasets
from torch.utils.data import DataLoader
from resnet50 import ResNet50
用CIFAR-10 数据集进行实验
def main():
batchsz = 128
cifar_train = datasets.CIFAR10('cifar', True, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_train = DataLoader(cifar_train, batch_size=batchsz, shuffle=True)
cifar_test = datasets.CIFAR10('cifar', False, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_test = DataLoader(cifar_test, batch_size=batchsz, shuffle=True)
x, label = iter(cifar_train).next()
print('x:', x.shape, 'label:', label.shape)
device = torch.device('cuda')
# model = Lenet5().to(device)
model = ResNet50().to(device)
criteon = nn.CrossEntropyLoss().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
# print(model)
for epoch in range(1000):
model.train()
for batchidx, (x, label) in enumerate(cifar_train):
# [b, 3, 32, 32]
# [b]
x, label = x.to(device), label.to(device)
logits = model(x)
# logits: [b, 10]
# label: [b]
# loss: tensor scalar
loss = criteon(logits, label)
# backprop
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(epoch, 'loss:', loss.item())
model.eval()
with torch.no_grad():
# test
total_correct = 0
total_num = 0
for x, label in cifar_test:
# [b, 3, 32, 32]
# [b]
x, label = x.to(device), label.to(device)
# [b, 10]
logits = model(x)
# [b]
pred = logits.argmax(dim=1)
# [b] vs [b] => scalar tensor
correct = torch.eq(pred, label).float().sum().item()
total_correct += correct
total_num += x.size(0)
# print(correct)
acc = total_correct / total_num
print(epoch, 'test acc:', acc)
if __name__ == '__main__':
main()
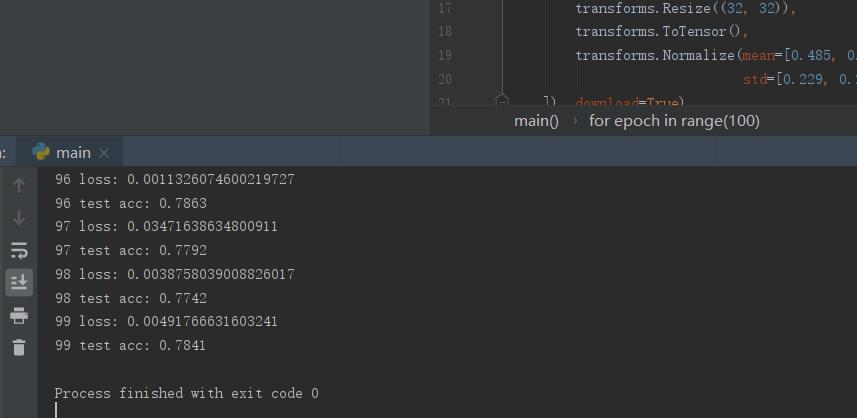
结果展示
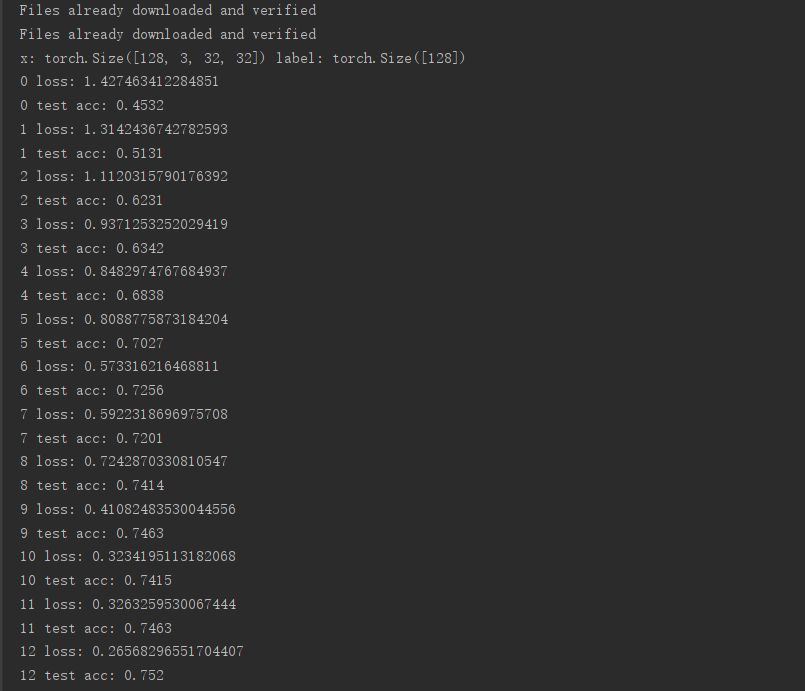
跑了100个Epoch,标号从0-99.最后的AC结果为0.7841
Original: https://blog.csdn.net/l_z_z_z/article/details/119055564
Author: l_z_z_z
Title: 分类模型–ResNet系列–ResNet50
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/664868/
转载文章受原作者版权保护。转载请注明原作者出处!