

资料编号:067 下面是相关功能视频演示:
67-基于stm32单片机语音识别控制小车机器人(实物图+源码+原理图+全套资料)
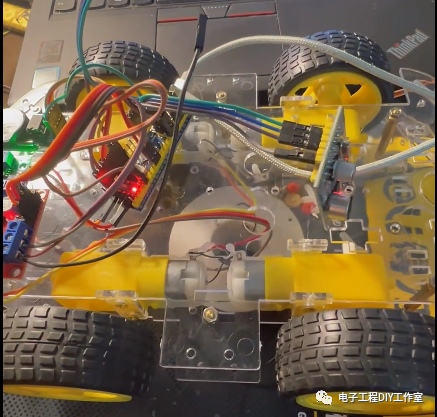
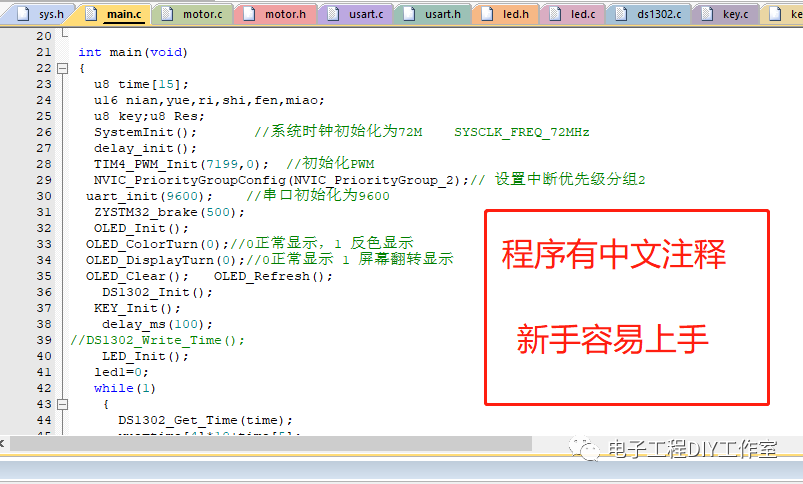
单片机采用stm32,可以通过语音控制小车前后左右行驶,控制比较灵敏,程序中文注释,比较容易读懂修改;
下面是实物图展示:

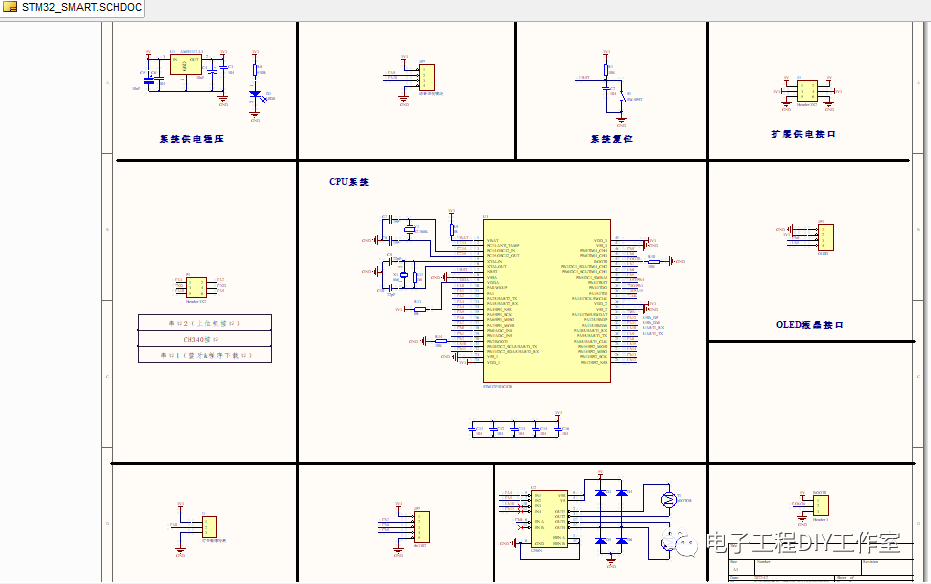
下面是原理图展示:
下面是该程序的部分展示:
/反显函数
void OLED_ColorTurn(u8 i)
{
if(i==0)
{
OLED_WR_Byte(0xA6,OLED_CMD);//正常显示
}
if(i==1)
{
OLED_WR_Byte(0xA7,OLED_CMD);//反色显示
}
}
//屏幕旋转180度
void OLED_DisplayTurn(u8 i)
{
if(i==0)
{
OLED_WR_Byte(0xC8,OLED_CMD);//正常显示
OLED_WR_Byte(0xA1,OLED_CMD);
}
if(i==1)
{
OLED_WR_Byte(0xC0,OLED_CMD);//反转显示
OLED_WR_Byte(0xA0,OLED_CMD);
}
}
//起始信号
void I2C_Start(void)
{
OLED_SDIN_Set();
OLED_SCLK_Set();
OLED_SDIN_Clr();
OLED_SCLK_Clr();
}
//结束信号
void I2C_Stop(void)
{
OLED_SCLK_Set();
OLED_SDIN_Clr();
OLED_SDIN_Set();
}
//等待信号响应
void I2C_WaitAck(void) //测数据信号的电平
{
OLED_SCLK_Set();
OLED_SCLK_Clr();
}
//关闭OLED显示
void OLED_DisPlay_Off(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x10,OLED_CMD);//关闭电荷泵
OLED_WR_Byte(0xAF,OLED_CMD);//关闭屏幕
}
//更新显存到OLED
void OLED_Refresh(void)
{
u8 i,n;
for(i=0;i
//画点
//x:0~127
//y:0~63
void OLED_DrawPoint(u8 x,u8 y)
{
u8 i,m,n;
i=y/8;
m=y%8;
n=1<
//清除一个点
//x:0~127
//y:0~63
void OLED_ClearPoint(u8 x,u8 y)
{
u8 i,m,n;
i=y/8;
m=y%8;
n=1<
下面是该资料的分享下载链接:
https://pan.baidu.com/s/1-20rUNM35Wh3D1tftTitVg?pwd=xjtl
Original: https://blog.csdn.net/m0_74295839/article/details/127814671
Author: super单片机
Title: 基于stm32单片机语音识别控制小车机器人
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/653823/
转载文章受原作者版权保护。转载请注明原作者出处!