

本篇推文将为大家介绍如何基于空间句法分析城市道路的可达性,相信大家已经看过小编之前的一篇推文《》,那一篇文章主要基于OD成本矩阵来分析道路可达性。而本文介绍的空间句法更强调空间关系,将人的行为与空间组合模式紧密结合起来,这也是为什么空间句法能够成为空间结构分析、城市形态学等最重要的分析理论与方法之一的原因。
知识课堂
要运用空间句法来分析城市道路的可达性,首先需要理解几个名词:
(1)空间句法:空间句法是20世纪70年代由英国学者比尔·希列尔提出的,用于描述和分析空间关系的数学方法。基本原理是对空间进行尺度划分和空间分割,以数学拓扑关系来描述空间之间的定量关系,并以此探究人类活动行为与空间形态之间的联系,解读城市空间形态对人类空间行为的影响方式与程度。
(2)整合度:整合度( Integration ),亦叫集成度,是指空间系统中某一元素与其他元素之间的集聚或离散程度,衡量了一个空间作为目的地吸引到达交通的能力,反映了该空间在整个系统中的中心性。整合度越高的空间,可达性越高,中心性越强,越容易集聚人流。整合度可分为全局整合度和局部整合度。
(3)选择度:选择度( Choice )是指空间系统中某一元素作为两个节点之间最短拓扑距离的频率,考察空间单元作为出行最短路径所具备的优势,反映了空间被穿行的可能性,选择度越高的空间,则更有可能被人流穿行,所以选择度也叫穿行度。
(4)连接值:连接值(Connectivity),表示系统中某个空间相交的空间数。
(5)控制值:控制值(Control),表示某一空间与之相交的空间的控制程度,数值上等于与之相邻的空间的连接值的倒数之和
(6)深度值:深度值(Depth),表示某一空间到达其它空间所需经过的最小连接数。
操作步骤
准备数据:osm路网数据
涉及软件:depthmap、ArcGIS或CAD
Depthmap安装包:
百度云链接:https://pan.baidu.com/s/15eamb4u_-bKZeytF2ctEsg?pwd=njra
提取码:njra
- 路网数据预处理
在ArcGIS中对osm路网数据进行预处理,如果有CAD道路文件也行。具体步骤参考往期推文《》。
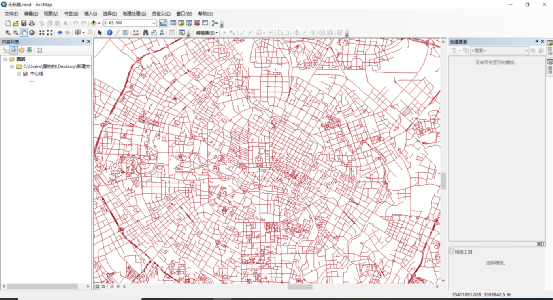

处理好后,将路网图层另存为DXF格式的文件(depthmap支持格式),CAD中也是同理另存为DXF文件就行。

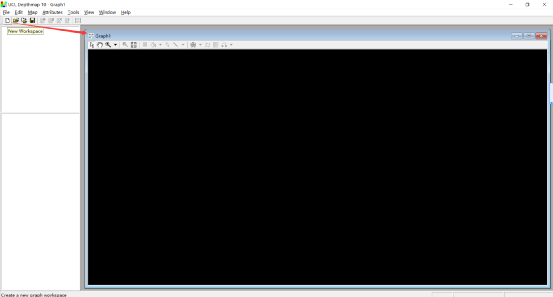
- 构建轴线模型
打开depthmap软件,新建一个工作空间,点击Map下的import将我们处理好的道路DXF文件加载进工作空间。小编提前在ArcGIS中将路网已处理好,注意,一定要删除一些零星的道路,否则对结果影响会非常大。
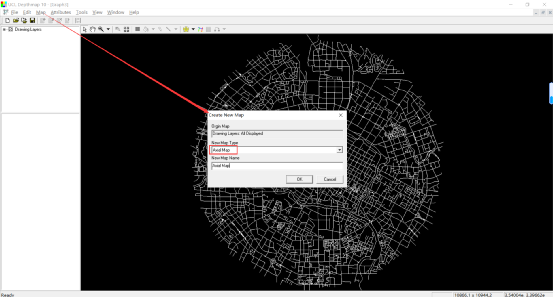
加载好数据后,选择Map下的Convert Drawing Map功能,在弹出的对话框中,将新地图类型设置为Axial Map,点击OK后会自动生成轴线模型。其中Connectivity表示的是每条道路的连通性,也就是连接值。

- 轴线分析
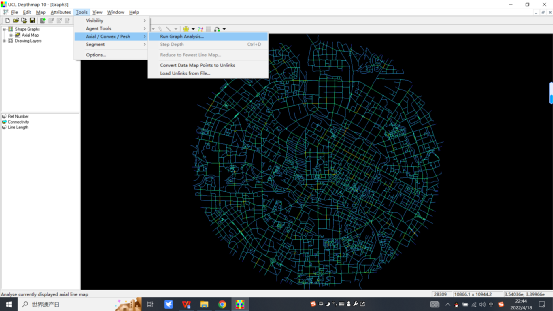
选择Tool下的Axial/Convex/Pesh,点击Run Graph Analysis,打开参数设置对话框,首先要设置的是搜索半径,这里的搜索半径是一种抽象的表达,对于不同的出行方式(步行、车行),不同搜索半径下的分析结果可以抽象反映出人们对不同出行方式下城市空间形态的认知。即当搜索半径为n时,即所有空间都纳入计算,得到的空间参数可表达车行状态下的空间认知,如全局整合度,这时反映出的是整体的道路可达性;相应的,不同搜索半径下的道路可达性在空间分布上也有所差异。其他的可以默认,当然也可以对计算进行加权,就在最后一个勾选框中可以选择连接度、线长度等参数作为权重。设置好后点击OK,稍等片刻即可看见分析结果。
- 结果分析
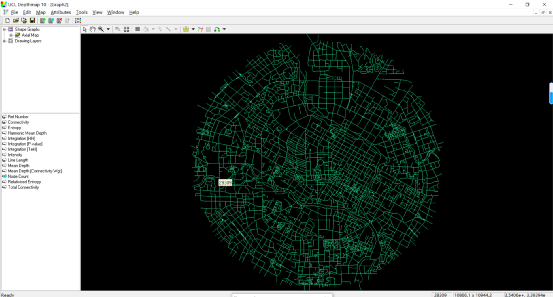
运行完后,如果结果中Node Count是这个熊样子(一片红色,其中有零星几条蓝色线),说明这几条蓝色线与整个路网不通,这是我们需要返回到数据处理的步骤将这几条蓝色线删掉或者将它们与路网连通。

如果Node Count是绿油油的一片,说明整个路网都是连通的,这时可以对结果进行解读。
integration[HH]结果中,越接近红色表示整合度越高,越接近蓝色表示整合度越低,整合度越高的地方道路可达性越高,因此从图中可以看出,全局整合度下,路网中间的可达性明显高于周边。
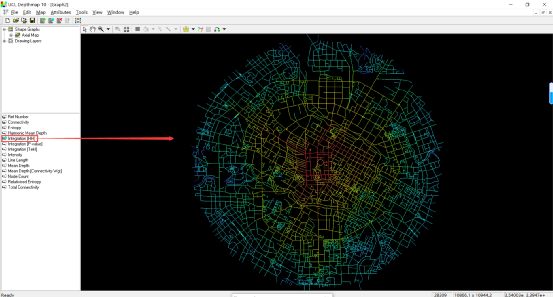
而在r=3的情况下,可反映出局部可达性的情况。

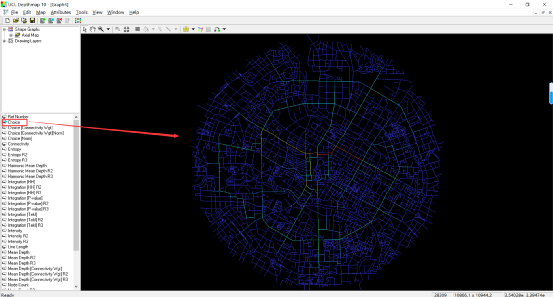
选择度则反映了空间被穿行的可能性,选择度越高的空间,则更有可能被人流穿行,图中可以看出,城市中的主干道、中轴线、环线等道路更容易被人们选择。
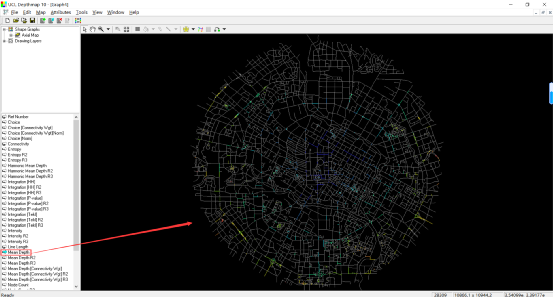
深度值反映了某一空间到达其它空间所需经过的最小连接数,可以看出越是道路复杂的地方深度值越高,当然这也有可能是我们没有剔除一些影响分析结果的道路,比如人行道、小径等,导致不同尺度的道路都有。

结 语
感谢观看,多多支持,下期再见,点个赞呗!


往期精彩推荐




扫描二维码获取
更多精彩

凌晨GIS
Original: https://blog.csdn.net/qq_39167542/article/details/124311515
Author: 凌晨GIS
Title: 基于空间句法的城市道路可达性分析
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/649978/
转载文章受原作者版权保护。转载请注明原作者出处!