

栅格一矢量数据转换是数据转换的一种方法,即矢量与栅格两种数据形式之间的转换技术。空间数据表示的两种方法各有优缺点和适用场合,因此需要根据使用目的进行 栅格一矢量数据的转换。
矢量数据向栅格数据的转换一般比较方便;对于点、线目标,由其所在的栅格行、列数表示,对于面状目标,则需判定落人该面积内的像元.通常栅格(像元)尺寸均大于原来坐标表示的分辨率,所以若将栅格化数据再反转回去,则不可能达到原来矢量数据的精度.将矢量数据转化为栅格数据,主要用于空间分析、多边形叠置等。
栅格数据矢量化较为复杂,如果由一幅扫描的数字化地图来建立矢量数据库,则需要经过数字图象处理,如边缘增强、细化、二值化、特征提取及模式识别才能获得矢量数据。人们通常将多色地图分色后逐个元素(如等高线地貌、水系、道路网、地物、符号与注记等)加以识别和提取。如果将数字影像矢量化,则需要事先做好重采样、图象处理、影像匹配和影像理解等过程,才能将影像上的语义和非语义信息提取出来,并形成矢量形式的数据。
说明:栅格数据矢量化流程参考:GIS中栅格数据转换矢量数据算法 | 麻辣GIS
一、栅格数据矢量化流程
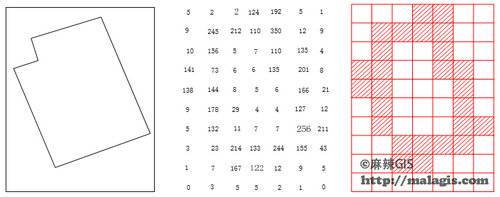
1、二值化
由于扫描后的图像是以不同灰度级存储的,为了进行栅格数据矢量化的转换,需压缩为两级(0和1),称为二值化。

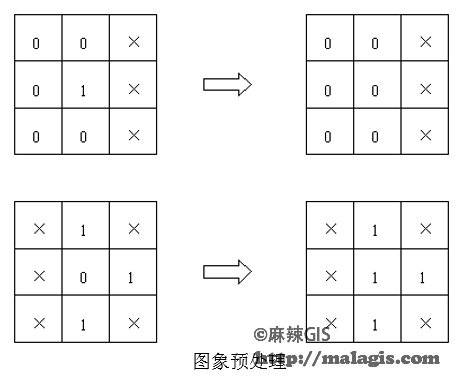
2、二值图像预处理
对于扫描输入的图幅,由于原稿不干净等原因,总是会出现一些飞白、污点、线划边缘凹凸不平等。
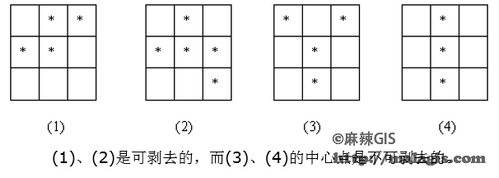
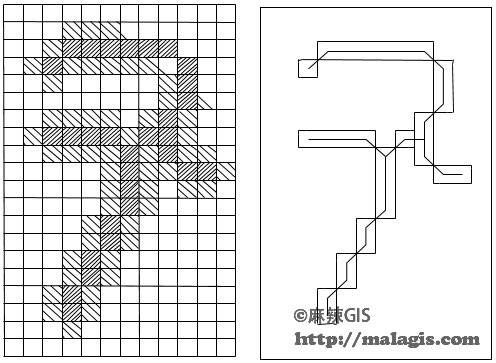
3、细化骨架化
所谓细化就是将二值图像象元阵列逐步剥除轮廓边缘的点,使之成为线划宽度只有一个象元的骨架图形。细化后的图形骨架既保留了原图形的绝大部分特征,又便于下一步的跟踪处理。
细化的基本过程是:
- 确定需细化的象元集合;
- 移去不是骨架的象元;
- 重复,直到仅剩骨架象元;
如果是对扫描后的地图图像进行细化处理,应符合下列基本要求:
- 保持原线划的连续性;
- 线宽只为一个象元;
- 细划后的骨架应是原线划的中心线;
- 保持图形的原有特征;
4、追踪
细化后的二值图像形成了骨架图,追踪就是把骨架转换为矢量图形的坐标序列。其基本步骤为:
- 从左向右,从上向下搜索线划起始点,并记下坐标;
- 朝该点的8个方向追踪点,若没有,则本条线的追踪结束,转(1)进行下条线的追踪;否则记下坐标;
- 把搜索点移到新取的点上,转(2);
注意的是,已追踪点应作标记,防止重复追踪。
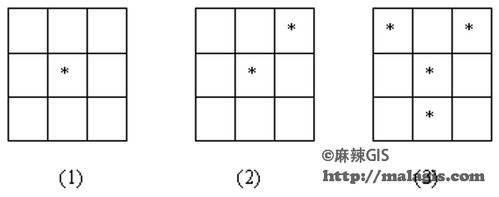
5、拓扑化
为了进拓扑化,需找出线的端点和结点,以及孤立点。
- 孤立点:8邻城中没有为1的象元。如图(1);
- 端点:8邻城中只有一个为1的象元。如图(2);
- 结点:8邻城中有三个或三个以上为1的象元。如图(3);
二、栅格数据矢量化实验
1、栅格数据矢量化代码
说明:由于代码有点多,如果全部贴上去的话会造成博客有些卡顿(上一篇博客就是放太多代码造成打开时卡顿),所以下面三个源文件都是只放了部分代码, 如果需要完整工程,见底部链接!!!
(1)myVector.h
//命名空间只在头文件中包含即可,否则易出错
using namespace std;
using namespace cv;
class myVector
{
public:
myVector();
~myVector();
//定义结构体,和类的作用类似
struct result
{
QVector > roads; //Point2d二维数据点类型,用于存放坐标
QVector width;
QString ImageFilePath;
int rows;
int cols;
};
public:
QVector roadInformation; //保存矢量化后的数据结果,包括新旧影像
//************************** 道路细化 **************************//
//对输入图像道路进行细化//
void imageThin(Mat& src, Mat& dst);
//道路细化查表法//
Mat img_bone(Mat& mat);
//查表法//
Mat lookUpTable(Mat& mat, int lut[]);
//************************** 道路矢量化 **************************//
//利用栅格道路数据创建矢量化道路数据,切割大小为deltaSize
void createVectorFromFile(QString inputFileName, int deltaSize);
//利用栅格道路数据创建矢量化道路数据,不切割//
void createVectorFromFile(QString inputFileName, QString outputFilePath);
//道路矢量化//
void createVector(Mat& binSrc, Mat& mix_src, Mat& endPoint, Mat& nodePoint, int index, bool cut, int startX, int startY);
//简化矢量道路数据//
void simplifyVector(int index);
//简化矢量道路数据//
QVector simplifyVector(QVector vector, int threshold);
//输出矢量道路数据//
void outputBinaryResult(int index, QString outputFilePath, QString str);
(2)myVector.cpp
//************************** 道路矢量化 **************************//
//利用栅格道路数据创建矢量化道路数据,不切割//
void myVector::createVectorFromFile(QString inputFileName, QString outputFilePath)
{
clock_t start, finish; //clock_t 是一个长整型数据类型,是一种用于保存时间的数据类型
start = clock(); //返回值是该程序从启动到clock()函数调用占用CPU的时间,创建矢量化道路的起始时间
double tim;
Mat src_img, dst_img, imgbone, src_imgBool, imgbone_bool, imgnode_bool, img_endpoint_bool;
//判断导入的数据是否存在,参数 0 是指imread按单通道的方式读入图像,即灰白图像
if ((src_img = imread(inputFileName.toStdString(), 0)).empty())
{
cout << "load image error!";
return;
}
result Result; //result是自定义的类
Result.ImageFilePath = inputFileName;
Result.rows = src_img.rows;
Result.cols = src_img.cols;
roadInformation.append(Result); //添加当前影像数据
/******************** 道路细化 ********************/
qDebug() << "开始细化..." << endl;
double thin_start = (double)getTickCount();
//高斯滤波是一种线性滤波器,能够有效的抑制噪声、平滑图像
GaussianBlur(src_img, src_img, Size(7, 7), 0, 0);
//输入图像细化
imageThin(src_img, src_imgBool);
threshold(src_imgBool, src_imgBool, 0, 255, THRESH_OTSU);
imgbone = img_bone(src_imgBool);
double thin_end = ((double)getTickCount() - thin_start) / getTickFrequency();
qDebug() << "细化道路数据使用时间:" << thin_end << "s" << endl;
qDebug() << "细化结束!" << endl;
//去掉噪,例如过滤很小或很大像素值的图像点
//threshold(src_img, src_imgBool, 0, 255, THRESH_OTSU);
//Mat imgbone = img_bone(src_imgBool);
imwrite(".\\image_save\\roadThin.png", imgbone * 255);
/******************** 道路矢量化 ********************/
qDebug() << "开始矢量化..." << endl;
double change_detection_start = (double)getTickCount();
threshold(imgbone, imgbone_bool, 0, 255, THRESH_BINARY);
Mat nodePoint = road_node(imgbone); //获取弧段连接点
Mat endPoint = road_endpoint(imgbone); //获取弧段端点
Mat mix_node = LineBreak(imgbone_bool, nodePoint); //对弧段进行打断
//矢量化
createVector(src_imgBool, mix_node, endPoint, nodePoint, roadInformation.size() - 1, false, 0, 0);
double vector_end = ((double)getTickCount() - change_detection_start) / getTickFrequency();
qDebug() << "矢量化道路数据所用时间:" << vector_end << endl;
}
(3)main.cpp
#include
#include"myVector.h"
// 注:main.cpp 文件中不能再添加命名空间,否则会调用自定义成员函数时找不到标识符
int main()
{
myVector roadThinAndVector;
roadThinAndVector.createVectorFromFile("..\\testImage\\labels.png", "roadThin.png"); //旧时相影像栅格数据矢量化
//简化矢量道路数据,也即一些预处理,如:平滑等
roadThinAndVector.simplifyVector(0); //旧影像
//输出矢量道路数据简化后的道路数据
roadThinAndVector.outputBinaryResult(0, "roadVector.png", ".\\old_vector_result.txt");
qDebug() << "矢量化结束!" << endl;
system("pause");
return 0;
}
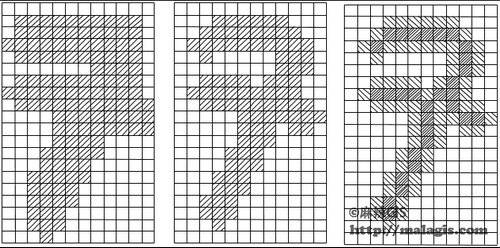
2、栅格数据矢量化结果
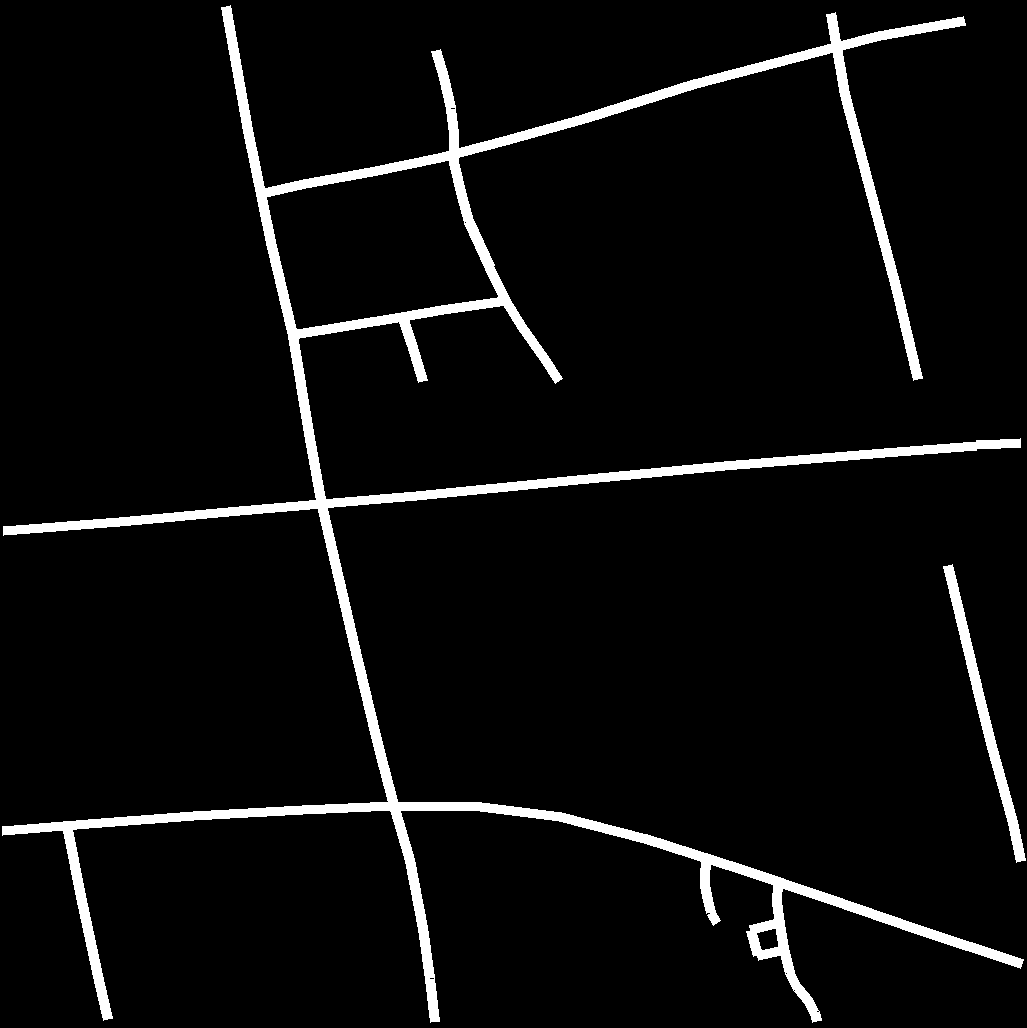
(1)输入二值图
(2) 细化、矢量化结果
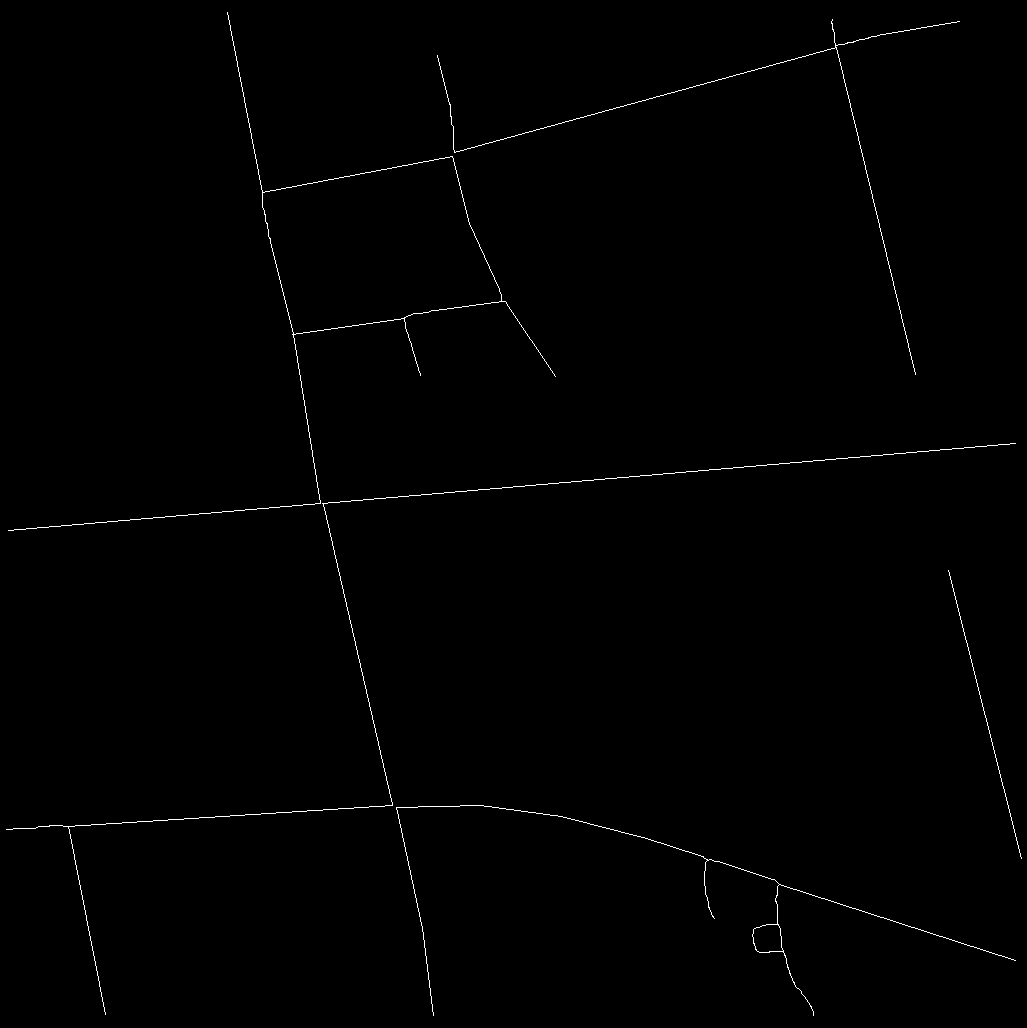
说明:左图是细化结果,右图是矢量化结果;
(3)配置说明
vs2019 + opencv4.4.0 + Qt5.12.5 + gdal2.3.2 + Debug x64
vs2019、opencv4.4.0 和 Qt5.12.5 的配置过程比较简单这里就不过多阐述了;
gdal2.3.2 的配置流程见:https://blog.csdn.net/weixin_47156401/article/details/120648970?spm=1001.2014.3001.5502
上述环境配置完成后使用该工程的过程中,若出现以下问题:
如果出现无法打开 Qt 源文件,解决方案见:https://blog.csdn.net/weixin_47156401/article/details/120626400?spm=1001.2014.3001.5502
说明:上述环境配置、问题解决方案都是通过亲测验证,真实有效!!!
代码工程文件中包含二值图细化、矢量化和矢量化简化等工程,且代码注释非常详细,由上述给出的部分代码也可以看出,在使用的过程中如有疑问,可留言!
工程链接: 栅格数据矢量化代码实现-C/C++文档类资源-CSDN下载
Original: https://blog.csdn.net/weixin_47156401/article/details/122337102
Author: 一米九零小胖子
Title: 栅格数据矢量化(附有完整代码)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/641106/
转载文章受原作者版权保护。转载请注明原作者出处!