

文章目录
任务
读入一张bmp图片,对图片进行灰度处理,二值化以及边缘检测(sobel算子),将处理后的数据写入bmp显示,全部过程以仿真形式。我这用的vivado。
说明
在图像处理领域,要实现Sobel或者均值滤波等算法,则需要按照3*3矩阵的格式提取数据,
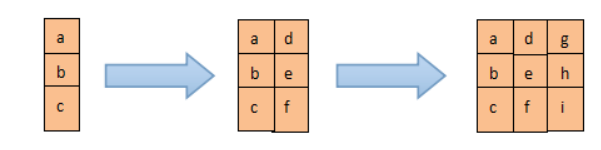

需要用到移位寄存器SHIFT RAM IP核。
Altera厂家的EDA环境下移位寄存器IP核可以实现多行的缓存输出,但是Xilinx下的Vivado环境,仅仅支持缓存输出一行数据,不过其实也无关紧要,我们这里可以使用两个SHIFT RAM IP核和正在输入的一行数据三者共同组成3行数据。
; 图片读取和写入
可参考FPGA-仿真读写bmp图片
使用图片(128*128):

本次实验的图片读取写入tb
timescale 1ns / 1ns
module top_tb;
reg clk;
reg rst;
wire [23:0] dout;
reg din_vld;
wire dout_vld;
integer bmp_width;
integer bmp_high;
integer bmp_size;
integer start_index;
integer bmp_file_id;
integer bmp_dout_id;
integer dout_txt_id;
integer h;
reg [7:0] rd_data [0:49300];
reg [7:0] rd_data2 [0:49300];
reg [23:0] wr_data;
integer i = 0;
integer index;
integer j = 0;
parameter CYCLE=20;
always #(CYCLE/2) clk=~clk;
initial
begin
clk=1'b1;
rst=1'b0;
#(CYCLE);
rst=1'b1;
#CYCLE;
rst=1'b0;
din_vld=1'b0;
bmp_file_id = $fopen("D:\\python\\pic\\er.bmp","rb");
dout_txt_id = $fopen("D:\\python\\pic\\output_file.txt","w+");
h = $fread(rd_data,bmp_file_id);
bmp_width = {rd_data[21], rd_data[20], rd_data[19], rd_data[18]};
bmp_high = {rd_data[25], rd_data[24], rd_data[23], rd_data[22]};
start_index = {rd_data[13], rd_data[12], rd_data[11], rd_data[10]};
bmp_size = {rd_data[5], rd_data[4], rd_data[3], rd_data[2]};
$fclose(bmp_file_id);
for(index = start_index; index < bmp_size-2; index = index + 3)begin
din_vld=1'b1;
wr_data = {rd_data[index + 2], rd_data[index + 1], rd_data[index]};
$fwrite(dout_txt_id, "%d,", wr_data[7:0]);
$fwrite(dout_txt_id, "%d,", wr_data[15:8]);
$fwrite(dout_txt_id, "%d\n", wr_data[23:16]);
#(CYCLE);
end
din_vld=1'b0;
$fclose(dout_txt_id);
end
initial
begin
#(3*CYCLE);
bmp_dout_id = $fopen("D:\\python\\pic\\output_file.bmp","wb");
for(i = 0; i < start_index; i = i + 1)begin
$fwrite(bmp_dout_id, "%c", rd_data[i]);
end
j=start_index;
while(j<bmp_size)
begin
if(dout_vld==1'b1)
begin
$fwrite(bmp_dout_id, "%c", dout[7:0]);
$fwrite(bmp_dout_id, "%c", dout[15:8]);
$fwrite(bmp_dout_id, "%c", dout[23:16]);
j=j+3;
end
else
begin
j=j;
end
#CYCLE;
end
$fclose(bmp_dout_id);
end
top u_top
(
.rst (rst),
.clk (clk),
.rgb_din (wr_data),
.din_vld (din_vld),
.rgb_out (dout),
.dout_vld (dout_vld)
);
endmodule
</code></pre>
<p>灰度转换</p>
<p>对于彩色图像转化为灰度图像,有一个著名的色彩心理学公式,即:
<img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/9b96cee6d3f04927b617027b3f25f2ef.png" />
但是在实际应用时,由于FPGA希望避免复杂的浮点运算,所以这里我们采用整数运算。将R、G、B三个分量对应的系数放大256倍得到整数结果:</p>
<p><img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/610df17e93db49b08fa84592cebf4b71.png" /></p>
<pre><code class="language-c">
1ns/100ps
module rgb2gray
(
rst,
clk,
din,
din_vld,
dout,
dout_vld
);
input rst;
input clk;
input [23:0] din;
input din_vld;
output [7:0] dout;
output dout_vld;
wire rst;
wire clk;
wire [23:0] din;
wire din_vld;
reg [7:0] dout;
reg dout_vld;
reg [7:0] data_r;
reg [7:0] data_g;
reg [7:0] data_b;
reg [17:0] pixel_r ;
reg [17:0] pixel_g ;
reg [17:0] pixel_b ;
reg [1:0] vld;
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
data_r8'b0;
data_g8'b0;
data_b8'b0;
end
else
begin
data_rdin[23:16];
data_gdin[15:8];
data_bdin[7:0];
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld2'b0;
end
else
begin
vld{vld[0],din_vld};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
pixel_r17'b0;
pixel_g17'b0;
pixel_b17'b0;
end
else if(vld[0]==1'b1)
begin
pixel_rdata_r*77;
pixel_gdata_g*150;
pixel_bdata_b*29;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout19'b0;
end
else if(vld[1]==1'b1)
begin
dout(pixel_r+pixel_g+pixel_b)>>8;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld1'b0;
end
else
begin
dout_vldvld[1];
end
end
endmodule
效果展示

高斯滤波
在灰度转换过程中,可能会因为取整操作引入噪声,所以接下来使用高斯滤波算法来去除灰度转化过程中引入的噪声。在本次使用实际处理过程中发现使用了高斯滤波最后效果并不理想,最后是去掉了这个模块,有兴趣的童鞋可以研究。
高斯滤波的具体操作是使用一个N _N卷积模板对整幅图像扫描,用模板确定的邻域内的像素加权平均值代替模板中心像素点的值。本文使用的3_3卷积模板如下:
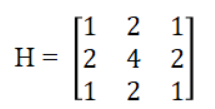
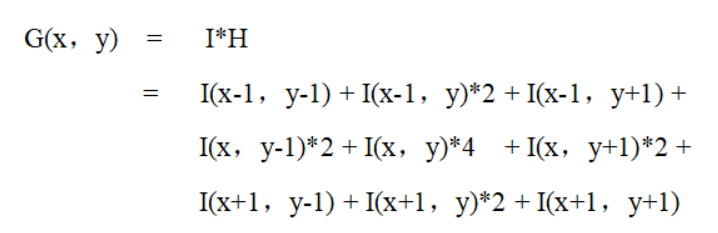
其中,I(x,y)表示原图像中坐标为(x,y)的像素值;G(x,y)表示高斯滤波之后的值。这里为了计算方便,选取的模板H的权重系数都是2的系数。模板中心的权值最大,这样有利于克服边界效应,避免经过高斯滤波之后图像模糊。
timescale 1ns/100ps
module gauss
(
rst,
clk,
din,
din_vld,
dout,
dout_vld
);
input rst;
input clk;
input [7:0] din;
input din_vld;
output [7:0] dout;
output dout_vld;
wire rst;
wire clk;
wire [7:0] din;
wire din_vld;
reg [7:0] dout;
reg dout_vld;
wire [7:0] row1_data;
wire [7:0] row2_data;
wire [7:0] row3_data;
wire [7:0] row1_data_r;
wire [7:0] row2_data_r;
reg [2:0] vld;
reg [7:0] row1_1;
reg [7:0] row1_2;
reg [7:0] row1_3;
reg [7:0] row2_1;
reg [7:0] row2_2;
reg [7:0] row2_3;
reg [7:0] row3_1;
reg [7:0] row3_2;
reg [7:0] row3_3;
reg [9:0] sum_1;
reg [9:0] sum_2;
reg [9:0] sum_3;
reg [11:0] sum;
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_17'b0;row1_2b0;row1_37'b0;
row2_17'b0;row2_2b0;row2_37'b0;
row3_17'b0;row3_2b0;row3_37'b0;
end
else if(vld[0]==1'b1)
begin
row1_1row1_data;row1_2row1_1;row1_3row1_2;
row2_1row2_data;row2_2row2_1;row2_3row2_2;
row3_1row3_data;row3_2row3_1;row3_3row3_2;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum_1 10'b0;
sum_2 10'b0;
sum_3 10'b0;
end
else if(vld[1]==1'b1)begin
sum_1 {2'd0,row1_1} + {1'd0,row1_2,1'd0} + {2'd0,row1_3};
sum_2 {1'b0,row2_1,1'b0} + {row2_2,2'd0} + {1'd0,row2_3,1'b0};
sum_3 {2'd0,row3_1} + {1'd0,row3_2,1'd0} + {2'd0,row3_3};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum12'b0;
end
else if(vld[2]==1'b1)begin
sumsum_1+sum_2+sum_3;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld3'b0;
end
else
begin
vld{vld[1:0],din_vld};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld1'b0;
end
else
begin
dout_vldvld[2];
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout8'b0;
end
else
begin
doutsum[4+:8];
end
end
assign row1_data=row1_data_r;
assign row2_data=row1_data_r;
assign row3_data=din;
c_shift_ram_1 u_shift_ram_0 (
.D(din),
.CLK(clk),
.SCLR(rst),
.Q(row2_data_r)
);
c_shift_ram_1 u_shift_ram_1 (
.D(row2_data_r),
.CLK(clk),
.SCLR(rst),
.Q(row1_data_r)
);
endmodule
</code></pre>
<p>效果展示:(不理想,所以最后没有用这个模块)
<img alt="" src="https://img-blog.csdnimg.cn/e2db272aef1342afbccb9555c0d2e882.bmp#pic_center" /></p>
<p>二值化</p>
<p>了解更多二值化操作可参考<a href="https://blog.csdn.net/Mouer__/article/details/127211920">图像二值化算法</a></p>
<p>首先使用的是全局二值化,给定一个全局阈值</p>
<pre><code class="language-c">
1ns/100ps
module gray2bin
(
rst,
clk,
din,
din_vld,
dout,
dout_vld
);
input rst;
input clk;
input [7:0] din;
input din_vld;
output dout;
output dout_vld;
wire rst;
wire clk;
wire [7:0] din;
wire din_vld;
reg dout;
reg dout_vld;
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld1'b0;
dout1'b0;
end
else
begin
dout_vlddin_vld;
dout(din>100);
end
end
endmodule
timescale 1ns/100ps
module gray2local_bin
(
rst,
clk,
din,
din_vld,
dout,
dout_vld
);
input rst;
input clk;
input [7:0] din;
input din_vld;
output dout;
output dout_vld;
wire rst;
wire clk;
wire [7:0] din;
wire din_vld;
reg dout;
reg dout_vld;
wire [7:0] row1_data;
wire [7:0] row2_data;
wire [7:0] row3_data;
wire [7:0] row1_data_r;
wire [7:0] row2_data_r;
reg [3:0] vld;
reg [7:0] row1_1;
reg [7:0] row1_2;
reg [7:0] row1_3;
reg [7:0] row2_1;
reg [7:0] row2_2;
reg [7:0] row2_3;
reg [7:0] row3_1;
reg [7:0] row3_2;
reg [7:0] row3_3;
reg [12:0] sum;
reg [7:0] thresh;
reg [7:0] value_delay1;
reg [7:0] value_delay2;
parameter NUM = 5'd9;
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_11'b0;row1_2b0;row1_31'b0;
row2_11'b0;row2_2b0;row2_31'b0;
row3_11'b0;row3_2b0;row3_31'b0;
end
else if(vld[0]==1'b1)
begin
row1_1row1_data;row1_2row1_1;row1_3row1_2;
row2_1row2_data;row2_2row2_1;row2_3row2_2;
row3_1row3_data;row3_2row3_1;row3_3row3_2;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum 13'b0;
end
else if(vld[1]==1'b1)begin
sumrow1_1+row1_2+row1_3+row2_1+row2_2+row2_3+row3_1+row3_2+row3_3;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
thresh 8'b0;
end
else if(vld[2]==1'b1)begin
thresh (sum+{sum,3'b0})>>7;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld4'b0;
end
else
begin
vld{vld[2:0],din_vld};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld1'b0;
end
else
begin
dout_vldvld[3];
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout1'b0;
end
else if(thresh<value_delay2)
begin
dout1'b1;
end
else
begin
dout1'b0;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
value_delay18'b0;
value_delay28'b0;
end
else
begin
value_delay1row2_2;
value_delay2value_delay1;
end
end
assign row1_data=row1_data_r;
assign row2_data=row2_data_r;
assign row3_data=din;
c_shift_ram_1 u_shift_ram_0 (
.D(din),
.CLK(clk),
.SCLR(rst),
.Q(row2_data_r)
);
c_shift_ram_1 u_shift_ram_1 (
.D(row2_data_r),
.CLK(clk),
.SCLR(rst),
.Q(row1_data_r)
);
endmodule
</code></pre>
<p>效果展示:
<img alt="" src="https://img-blog.csdnimg.cn/54a0af0849a94986a822c774e64443ec.bmp#pic_center" />
如果换张图片带有阴影:
<img alt="" src="https://img-blog.csdnimg.cn/eb4d60ec950843cdb09d8339a820b4ac.bmp#pic_center" />
会是怎样呢?</p>
<p>边缘检测(sobel)</p>
<p>Sobel算子主要用于检测图像边缘,在物体的边缘通常都有像素的变化,反映了物体与背景之间的差异,或者两个物体之间的差异。它是一个离散差分算子,用来计算像素点上下、左右领域内像素点的加权差,根据在边缘处达到极值来检测边缘。另外,Sobel算子对噪声也有一定的平滑作用,检测出精确的边缘信息,但是边缘定位精度不高。
Sobel算子在水平方向和垂直方向各采用一个模板,检测各方向上的边缘,其优点是计算简单,速度快;但是对于纹理较为复杂的图像,检测效果不理想。水平方向模板Sx和垂直方向模板Sy如下:
<img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/682634a475b84f35b6ceea653806ca4f.png" />
<img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/68e282eecaf34190a5426dd3abfc44cb.png" /></p>
<p>图像中每个像素点对应的梯度值按照以下公式计算:
<img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/d16849cd042d4f5e8c15d3debc5d74b2.png" />
图像中每个像素点对应的梯度值按照以下公式计算:
<img alt="FPGA-图像处理-仿真" src="https://johngo-pic.oss-cn-beijing.aliyuncs.com/articles/20230605/b5e14efe1c68495cb45b803acb871887.png" /></p>
<pre><code class="language-c">
1ns/100ps
module sobel
(
rst,
clk,
din,
din_vld,
dout,
dout_vld
);
input rst;
input clk;
input din;
input din_vld;
output dout;
output dout_vld;
wire rst;
wire clk;
wire din;
wire din_vld;
reg dout;
reg dout_vld;
wire row1_data;
wire row2_data;
wire row3_data;
wire row1_data_r;
wire row2_data_r;
reg [3:0] vld;
reg row1_1;
reg row1_2;
reg row1_3;
reg row2_1;
reg row2_2;
reg row2_3;
reg row3_1;
reg row3_2;
reg row3_3;
reg [2:0] x0_sum;
reg [2:0] x2_sum;
reg [2:0] y0_sum;
reg [2:0] y2_sum;
reg [2:0] x_abs;
reg [2:0] y_abs;
reg [2:0] g;
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_11'b0;row1_2b0;row1_31'b0;
row2_11'b0;row2_2b0;row2_31'b0;
row3_11'b0;row3_2b0;row3_31'b0;
end
else if(vld[0]==1'b1)
begin
row1_1row1_data;row1_2row1_1;row1_3row1_2;
row2_1row2_data;row2_2row2_1;row2_3row2_2;
row3_1row3_data;row3_2row3_1;row3_3row3_2;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
x0_sum 3'b0;
x2_sum 3'b0;
y0_sum 3'b0;
y2_sum 3'b0;
end
else if(vld[1]==1'b1)begin
x0_sum {2'd0,row1_1} + {1'd0,row1_2,1'd0} + {2'd0,row1_3};
x2_sum {2'd0,row3_1} + {1'd0,row3_2,1'd0} + {2'd0,row3_3};
y0_sum {2'd0,row1_1} + {1'd0,row2_1,1'd0} + {2'd0,row3_1};
y2_sum {2'd0,row1_3} + {1'd0,row2_3,1'd0} + {2'd0,row3_3};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
x_abs 3'b0;
y_abs 3'b0;
end
else if(vld[2]==1'b1)begin
x_abs (x0_sum >= x2_sum)?(x0_sum-x2_sum):(x2_sum-x0_sum);
y_abs (y0_sum >= y2_sum)?(y0_sum-y2_sum):(y2_sum-y0_sum);
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
g 3'b0;
end
else if(vld[3]==1'b1)begin
g x_abs + y_abs;
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld4'b0;
end
else
begin
vld{vld[2:0],din_vld};
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld1'b0;
end
else
begin
dout_vldvld[3];
end
end
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout1'b0;
end
else if(g>2)
begin
dout1'b1;
end
else
begin
dout1'b0;
end
end
assign row1_data=row1_data_r;
assign row2_data=row2_data_r;
assign row3_data=din;
c_shift_ram_0 u_shift_ram_0 (
.D(din),
.CLK(clk),
.SCLR(rst),
.Q(row2_data_r)
);
c_shift_ram_0 u_shift_ram_1 (
.D(row2_data_r),
.CLK(clk),
.SCLR(rst),
.Q(row1_data_r)
);
endmodule
效果展示

顶层文件
`timescale 1ns/100ps
module top
(
rst,
clk,
rgb_din,
din_vld,
rgb_out,
dout_vld
);
input rst;
input clk;
input [23:0] rgb_din;
input din_vld;
output [23:0] rgb_out;
output dout_vld;
wire rst;
wire clk;
wire [23:0] rgb_din;
wire din_vld;
reg [23:0] rgb_out;
reg dout_vld;
wire [7:0] dout_gray;
wire gray_vld;
wire [7:0] dout_gauss;
wire gauss_vld;
wire dout_bin;
wire bin_vld;
wire dout_sobel;
wire sobel_vld;
rgb2gray u_rgb2gray
(
.rst (rst ),
.clk (clk ),
.din (rgb_din ),
.din_vld (din_vld ),
.dout (dout_gray ),
.dout_vld (gray_vld )
);
gray2bin u_gray2bin
(
.rst (rst ),
.clk (clk ),
.din (dout_gray ),
.din_vld (gray_vld ),
.dout (dout_bin ),
.dout_vld (bin_vld )
);
sobel u_sobel
(
.rst (rst ),
.clk (clk ),
.din (dout_bin ),
.din_vld (bin_vld ),
.dout (dout_sobel ),
.dout_vld (sobel_vld )
);
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
rgb_out24'b0;
dout_vld1'b0;
end
else
begin
rgb_out{24{dout_sobel}};
dout_vldsobel_vld;
end
end
endmodule
改进中- – – –
Original: https://blog.csdn.net/Mouer__/article/details/127295239
Author: 伊木子曦
Title: FPGA-图像处理-仿真
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/632078/
转载文章受原作者版权保护。转载请注明原作者出处!