

作者


* Ameya D. Jagtap1,∗ and George Em Karniadakis1,2
期刊
* Communications in Computational Physics
日期
* 2020
代码
* 代码链接
1 摘要
提出了更灵活分解域的XPINN方法,比cPINN区域分解更灵活,而且使用与所有方程。
2 背景
cPINN是通过区域分解,每个区域使用小的网络进行训练,使得求解时不同区域能够并行计算。论文提出的XPINN具有cPINN的区域分解的优势,同时还有以下优势
* Generalized space-time domain decomposition,XPINN公式提供了高度不规则的、凸/非凸的时空域分解,由于这样的分解XPINN公式提供了高度不规则的、凸/非凸的时空域分解
* XPINN公式提供了高度不规则的、凸/非凸的时空域分解
* 简单中间条件,在XPINN中,对于任意形状的界面来说,界面条件非常简单,不需要法线方向,因此,所提出的方法可以很容易地扩展到任何复杂的几何形状,甚至是更高维度的几何形状。
精确求解复杂的方程组,特别是高维方程组已经成为科学计算的最大挑战之一。XPINN的优点使其成为适合进行此类高维复杂模拟的候选对象,而这个高维模拟通常需要大量的训练成本的。
3 XPINN方法
描述:
* Subdomains :子域Ω q , q = 1 , 2 , ⋯ N s d \Omega_{q}, q=1,2, \cdots N_{s d}Ωq ,q =1 ,2 ,⋯N s d 是整个计算域Ω \Omega Ω的非重叠子域,满足Ω = ⋃ q = 1 N s d Ω q \Omega=\bigcup_{q=1}^{N_{s d}} \Omega_{q}Ω=⋃q =1 N s d Ωq 和Ω i ∩ Ω j = ∂ Ω i j , i ≠ j \Omega_{i} \cap \Omega_{j}=\partial \Omega_{i j}, i \neq j Ωi ∩Ωj =∂Ωij ,i =j表示分解域的个数,子域的相交仅仅是在边界∂ Ω i j \partial \Omega_{i j}∂Ωij
* Interface :表示两个或者多个子域的共同边界对应的子网(sub-Nets)之间互通
* sub-Net:子PINN是指每个子域中使用的具有自己的一组优化超参数的个体PINN
* Interface Conditions: 这些条件用于将分解的子域连接在一起,从而得到完全域上的控制偏微分方程的解,根据控制方程的性质,一个或多个界面条件可以应用在共同界面上,如解连续性、通量连续性等

上图中X就是求解域,黑色实线表示区域的边界,黑色虚线表示interface。XPINN的基本interface条件包括强形式的连续性条件和在共同interface上强制不同子网给出的平均解。cPINN文中提到,为了稳定性,没有必要加平均解的条件,但实验也表明了会加快收敛速度。XPINN具有cPINN的所有优点,如并行化能力、大的表示能力、优化方法、激活函数、网络深度或宽度等超参数的高效选择。与cPINN不同,XPINN可以用于求解任何类型的偏微分方程,而不一定是守恒定律。在XPINN情况下,采用法向通量连续性条件不需要找到法向。这大大降低了算法的复杂性,特别是在具有复杂领域的大规模问题以及移动界面问题。
第q t h q^{t h}q t h个子域的神经网络输出定义为
u Θ ~ q ( z ) = N L ( z ; Θ ~ q ) ∈ Ω q , q = 1 , 2 , ⋯ , N s d u_{\tilde{\mathbf{\Theta}}{q}}(\mathbf{z})=\mathcal{N}^{L}\left(\mathbf{z} ; \tilde{\mathbf{\Theta}}{q}\right) \in \Omega_{q}, \quad q=1,2, \cdots, N_{s d}u Θ~q (z )=N L (z ;Θ~q )∈Ωq ,q =1 ,2 ,⋯,N s d
最终解定义为
u Θ ~ ( z ) = ∑ q = 1 N s d u Θ ~ q ( z ) ⋅ 1 Ω q ( z ) u_{\tilde{\mathbf{\Theta}}}(\mathbf{z})=\sum_{q=1}^{N_{s d}} u_{\tilde{\mathbf{\Theta}}{q}}(\mathbf{z}) \cdot \mathbb{1}{\Omega_{q}}(\mathbf{z})u Θ~(z )=∑q =1 N s d u Θ~q (z )⋅1 Ωq (z )
其中
1 Ω q ( z ) : = { 0 if z ∉ Ω q 1 if z ∈ Ω q \ Common interface in the q t h subdomain 1 S if z ∈ Common interface in the q t h subdomain \mathbb{1}{\Omega{q}}(\mathbf{z}):=\left{\begin{array}{ll} 0 & \text { if } \mathbf{z} \notin \Omega_{q} \ 1 & \text { if } \mathbf{z} \in \Omega_{q} \backslash \text { Common interface in the } q^{t h} \text { subdomain } \ \frac{1}{\mathcal{S}} & \text { if } \mathbf{z} \in \text { Common interface in the } q^{t h} \text { subdomain } \end{array}\right.1 Ωq (z ):=⎩⎨⎧0 1 S 1 if z ∈/Ωq if z ∈Ωq \Common interface in the q t h subdomain if z ∈Common interface in the q t h subdomain
S S S表示S表示沿公共界面相交的子域数量
3.1 正、逆问题子域的损失函数
(1)正问题
在q t h q^{t h}q t h子域的{ x u q ( i ) } i = 1 N u q , { x F q ( i ) } i = 1 N F q and { x I q ( i ) } i = 1 N I q \left{\mathbf{x}{u{q}}^{(i)}\right}{i=1}^{N{u q}},\left{\mathbf{x}{F{q}}^{(i)}\right}{i=1}^{N{F q}} \text { and }\left{\mathbf{x}{I{q}}^{(i)}\right}{i=1}^{N{I q}}{x u q (i )}i =1 N u q ,{x F q (i )}i =1 N Fq and {x I q (i )}i =1 N I q 表示training, residual, and the common interface points。N u q , N F q a n d N I q N_{u_{q}}, N_{F_{q}} and N_{I q}N u q ,N F q an d N I q 分别代表对应的点的个数,每个子域使用一个PINN,u q = u Θ ~ t u_{q}=u_{\tilde{\Theta}{t}}u q =u Θ~t ,第q t h q^{t h}q t h个子域损失函数定义为
J ( Θ ~ q ) = W u q MSE u q ( Θ ~ q ; { x u q ( i ) } i = 1 N u q ) + W F q MSE F q ( Θ ~ q ; { x F q ( i ) } i = 1 N F q ) + W I q MSE u a v g ( Θ ~ q ; { x I q ( i ) } i = 1 N I q ) ⏟ Interface condition + W I F q MSE R ( Θ ~ q ; { x I q ( i ) } i = 1 N I q ) ⏟ Interface condition + Additional Interface Condition’s ⏟ Optional \begin{aligned} \mathcal{J}\left(\tilde{\mathbf{\Theta}}{q}\right)=& W_{u_{q}} \operatorname{MSE}{u{q}}\left(\tilde{\mathbf{\Theta}}{q} ;\left{\mathbf{x}{u_{q}}^{(i)}\right}{i=1}^{N{u q}}\right)+W_{\mathcal{F}{q}} \operatorname{MSE}{\mathcal{F}{q}}\left(\tilde{\boldsymbol{\Theta}}{q} ;\left{\mathbf{x}{F{q}}^{(i)}\right}{i=1}^{N{F q}}\right) \ &+W_{I_{q}} \underbrace{\operatorname{MSE}{u{a v g}}\left(\tilde{\boldsymbol{\Theta}}{q} ;\left{\mathbf{x}{I_{q}}^{(i)}\right}{i=1}^{N{I q}}\right)}{\text {Interface condition }}+W{I_{\mathcal{F}{q}}} \underbrace{\operatorname{MSE}{\mathcal{R}}\left(\tilde{\boldsymbol{\Theta}}{q} ;\left{\mathbf{x}{I_{q}}^{(i)}\right}{i=1}^{N{I q}}\right)}{\text {Interface condition }} \ &+\underbrace{\text { Additional Interface Condition’s }}{\text {Optional }} \end{aligned}J (Θ~q )=W u q MSE u q (Θ~q ;{x u q (i )}i =1 N u q )+W F q MSE F q (Θ~q ;{x F q (i )}i =1 N Fq )+W I q Interface condition MSE u a vg (Θ~q ;{x I q (i )}i =1 N I q )+W I F q Interface condition MSE R (Θ~q ;{x I q (i )}i =1 N I q )+Optional Additional Interface Condition’s
W u q , W F q , W I F q and W I q W_{u_{q}}, W_{\mathcal{F}{q}}, W{I_{\mathcal{F}{q}}} \text { and } W{I_{q}}W u q ,W F q ,W I F q and W I q 代表不同损失的参数,
MSE u q ( Θ ~ q ; { x u q ( i ) } i = 1 N u q ) = 1 N u q ∑ i = 1 N u q ∣ u ( i ) − u Θ ~ q ( x u q ( i ) ) ∣ 2 MSE F q ( Θ ~ q ; { x F q ( i ) } i = 1 N F q ) = 1 N F a ∑ i = 1 N F q ∣ F Θ ~ q ( x F q ( i ) ) ∣ 2 \begin{array}{l} \operatorname{MSE}{u{q}}\left(\tilde{\mathbf{\Theta}}{q} ;\left{\mathbf{x}{u_{q}}^{(i)}\right}{i=1}^{N{u q}}\right)=\frac{1}{N_{u_{q}}} \sum_{i=1}^{N_{u q}}\left|u^{(i)}-u_{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{u_{q}}^{(i)}\right)\right|^{2} \ \operatorname{MSE}{\mathcal{F}{q}}\left(\tilde{\mathbf{\Theta}}{q} ;\left{\mathbf{x}{F_{q}}^{(i)}\right}{i=1}^{N{F q}}\right)=\frac{1}{N_{F_{a}}} \sum_{i=1}^{N_{F q}}\left|\mathcal{F}{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{F{q}}^{(i)}\right)\right|^{2} \end{array}MSE u q (Θ~q ;{x u q (i )}i =1 N u q )=N u q 1 ∑i =1 N u q ∣∣u (i )−u Θ~q (x u q (i ))∣∣2 MSE F q (Θ~q ;{x F q (i )}i =1 N Fq )=N F a 1 ∑i =1 N Fq ∣∣F Θ~q (x F q (i ))∣∣2
MSE u a v g ( Θ ~ q ; { x I q ( i ) } i = 1 N I q ) = ∑ ∀ q + ( 1 N I q ∑ i = 1 N I q ∣ u Θ ~ q ( x I q ( i ) ) − { { u Θ ~ q ( x I q ( i ) ) } } ∣ 2 ) MSE R ( Θ ~ q ; { x I q ( i ) } i = 1 N I q ) = ∑ ∀ q + ( 1 N I q ∑ i = 1 N I q ∣ F Θ ~ q ( x I q ( i ) ) − F Θ ~ q + ( x I q ( i ) ) ∣ 2 ) \begin{array}{l} \operatorname{MSE}{u{a v g}}\left(\tilde{\mathbf{\Theta}}{q} ;\left{\mathbf{x}{I_{q}}^{(i)}\right}{i=1}^{N{I q}}\right)=\sum_{\forall q^{+}}\left(\frac{1}{N_{I_{q}}} \sum_{i=1}^{N_{I_{q}}}\left|u_{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{I_{q}}^{(i)}\right)-\left{\left{u_{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{I_{q}}^{(i)}\right)\right}\right}\right|^{2}\right) \ \operatorname{MSE}{\mathcal{R}}\left(\tilde{\mathbf{\Theta}}{q} ;\left{\mathbf{x}{I{q}}^{(i)}\right}{i=1}^{N{I q}}\right)=\sum_{\forall q^{+}}\left(\frac{1}{N_{I_{q}}} \sum_{i=1}^{N_{I_{q}}}\left|\mathcal{F}{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{I{q}}^{(i)}\right)-\mathcal{F}{\tilde{\Theta}{q^{+}}}\left(\mathbf{x}{I{q}}^{(i)}\right)\right|^{2}\right) \end{array}MSE u a vg (Θ~q ;{x I q (i )}i =1 N I q )=∑∀q +(N I q 1 ∑i =1 N I q ∣∣u Θ~q (x I q (i ))−{{u Θ~q (x I q (i ))}}∣∣2 )MSE R (Θ~q ;{x I q (i )}i =1 N I q )=∑∀q +(N I q 1 ∑i =1 N I q ∣∣F Θ~q (x I q (i ))−F Θ~q +(x I q (i ))∣∣2 )
最后两项代表着interface 条件损失,第四项是在子域q q q和q + q^{+}q +的两个不同网络的残差连续条件,q + q^{+}q +代表q q q的领域MSER和M S E u a v g MSE_{uavg}MS E u a vg ,都定义在所有相邻的子域,上式子中{ { u Θ ~ q } } = u avg : = u Θ ~ q + u Θ ~ q + 2 \left{\left{u_{\tilde{\mathbf{\Theta}}{q}}\right}\right}=u{\text {avg }}:=\frac{u_{\tilde{\mathbf{\Theta}}{q}}+u{\tilde{\mathbf{\Theta}}_{q^{+}}}}{2}{{u Θ~q }}=u avg :=2 u Θ~q +u Θ~q +(假设在公共界面上只有两个子域相交),additional interface conditions,例如flux continuity ,c k c^{k}c k也能根据PDE的类型以及interface 方向被加损失中。
remark:
* interface conditions 的类型决定了整个接口的解的正则性,从而影响收敛速度。在interface上的解是足够连续的,从而满足其控制PDE
* 足够多的interface point去连接子域,这对于算法的收敛很重要,特别是对于internal
对于逆问题:
J ( Θ ~ q , λ ) = W u q MSE u q ( Θ ~ q , λ ; { x u q ( i ) } i = 1 N u q ) + W F q MSE F q ( Θ ~ q , λ ; { x u q ( i ) } i = 1 N u q ) + W I q { MSE u a v g ( Θ ~ q , λ ; { x I q ( i ) } i = 1 N I q ) + MSE λ ( θ ~ q , λ ; { x I q ( i ) } i = 1 N I q ) } ⏟ Interface condition’s + W I F q MSE R ( Θ ~ q , λ ; { x I q ( i ) } i = 1 N I q ) ⏟ Intarf + Additional Interface Condition’s ⏟ Optional \begin{aligned} \mathcal{J}\left(\tilde{\mathbf{\Theta}}{q}, \lambda\right)=& W{u_{q}} \operatorname{MSE}{u{q}}\left(\tilde{\boldsymbol{\Theta}}{q}, \lambda ;\left{\mathbf{x}{u_{q}}^{(i)}\right}{i=1}^{N{u_{q}}}\right)+W_{\mathcal{F}{q}} \operatorname{MSE}{\mathcal{F}{q}}\left(\tilde{\boldsymbol{\Theta}}{q}, \lambda ;\left{\mathbf{x}{u{q}}^{(i)}\right}{i=1}^{N{u_{q}}}\right) \ &+W_{I_{q}} \underbrace{\left{\operatorname{MSE}{u{a v g}}\left(\tilde{\boldsymbol{\Theta}}{q}, \lambda ;\left{\mathbf{x}{I_{q}}^{(i)}\right}{i=1}^{N{I q}}\right)+\operatorname{MSE}{\lambda}\left(\tilde{\boldsymbol{\theta}}{q}, \lambda ;\left{\mathbf{x}{I{q}}^{(i)}\right}{i=1}^{N{I q}}\right)\right}}{\text {Interface condition’s }} \ &+W{I_{\mathcal{F}{q}}} \underbrace{\operatorname{MSE}{\mathcal{R}}\left(\tilde{\boldsymbol{\Theta}}{q}, \lambda ;\left{\mathbf{x}{I_{q}}^{(i)}\right}{i=1}^{N{I q}}\right)}{\text {Intarf }}+\underbrace{\text { Additional Interface Condition’s }}{\text {Optional }} \end{aligned}J (Θ~q ,λ)=W u q MSE u q (Θ~q ,λ;{x u q (i )}i =1 N u q )+W F q MSE F q (Θ~q ,λ;{x u q (i )}i =1 N u q )+W I q Interface condition’s {MSE u a vg (Θ~q ,λ;{x I q (i )}i =1 N I q )+MSE λ(θ~q ,λ;{x I q (i )}i =1 N I q )}+W I F q Intarf MSE R (Θ~q ,λ;{x I q (i )}i =1 N I q )+Optional Additional Interface Condition’s
其中
MSE F q ( Θ ~ q , λ ; { x u q ( i ) } i = 1 N u q ) = 1 N u q ∑ i = 1 N u q ∣ F Θ ~ q ( x u q ( i ) ) ∣ 2 MSE λ ( Θ ~ q , λ ; { x I q ( i ) } i = 1 N I q ) = ∑ ∀ q + ( 1 N I q ∑ i = 1 N l q ∣ λ q ( x I q ( i ) ) − λ q + ( x I q ( i ) ) ∣ 2 ) \begin{array}{l} \operatorname{MSE}{\mathcal{F}{q}}\left(\tilde{\boldsymbol{\Theta}}{q}, \lambda ;\left{\mathbf{x}{u_{q}}^{(i)}\right}{i=1}^{N{u_{q}}}\right)=\frac{1}{N_{u_{q}}} \sum_{i=1}^{N_{u_{q}}}\left|\mathcal{F}{\tilde{\mathbf{\Theta}}{q}}\left(\mathbf{x}{u{q}}^{(i)}\right)\right|^{2} \ \operatorname{MSE}{\lambda}\left(\tilde{\mathbf{\Theta}}{q}, \lambda ;\left{\mathbf{x}{I{q}}^{(i)}\right}{i=1}^{N{I q}}\right)=\sum_{\forall q^{+}}\left(\frac{1}{N_{I_{q}}} \sum_{i=1}^{N_{l q}}\left|\lambda_{q}\left(\mathbf{x}{I{q}}^{(i)}\right)-\lambda_{q^{+}}\left(\mathbf{x}{I{q}}^{(i)}\right)\right|^{2}\right) \end{array}MSE F q (Θ~q ,λ;{x u q (i )}i =1 N u q )=N u q 1 ∑i =1 N u q ∣∣F Θ~q (x u q (i ))∣∣2 MSE λ(Θ~q ,λ;{x I q (i )}i =1 N I q )=∑∀q +(N I q 1 ∑i =1 N lq ∣∣λq (x I q (i ))−λq +(x I q (i ))∣∣2 )
其他残差损失与正向损失一样。
Remark:需要注意的是,由于XPINN损失函数的高度非凸性,定位其全局最小值非常难。但是,对于几个局部极小值,损失函数的值是相似的,相应的预测解的精度是相似的。
3.2 优化方法
自动求导
3.3 误差
E app q = ∥ u a q − u q e x ∥ E gen q = ∥ u g q − u a q ∥ E opt q = ∥ u τ q − u g q ∥ \begin{aligned} \mathcal{E}{\text {app }} q &=\left\|u{a_{q}}-u_{q}^{e x}\right\| \ \mathcal{E}{\text {gen }} q &=\left\|u{g_{q}}-u_{a_{q}}\right\| \ \mathcal{E}{\text {opt }} q &=\left\|u{\tau_{q}}-u_{g_{q}}\right\| \end{aligned}E app q E gen q E opt q =∥∥u a q −u q e x ∥∥=∥∥u g q −u a q ∥∥=∥∥u τq −u g q ∥∥
分别代表approximation error、 generalization error 以及optimization error.
* u a q = arg min f ∈ F q ∥ f − u q e x ∥ u_{a_{q}}=\arg \min {f \in F{q}}\left\|f-u_{q}^{e x}\right\|u a q =ar g min f ∈F q ∥∥f −u q e x ∥∥是真解u q e x u_{q}^{e x}u q e x 的近似
* u g q = arg min Θ ~ q J ( Θ ~ q ) u_{g_{q}}=\arg \min {\tilde{\mathbf{\Theta}}{q}} \mathcal{J}\left(\tilde{\mathbf{\Theta}}{q}\right)u g q =ar g min Θ~q J (Θ~q )是全局最优解
* u τ q = arg min Θ ~ q J ( Θ ~ q ) u{\tau_{q}}=\arg \min {\tilde{\mathbf{\Theta}}{q}} \mathcal{J}\left(\tilde{\mathbf{\Theta}}_{q}\right)u τq =ar g min Θ~q J (Θ~q )是子网络训练后得到的解,
最后XPINN的误差可以总结为
E X P I N N : = ∥ u τ − u e x ∥ ≤ ∥ u τ − u g ∥ + ∥ u g − u a ∥ + ∥ u a − u e x ∥ \mathcal{E}{X P I N N}:=\left\|u{\tau}-u^{e x}\right\| \leq\left\|u_{\tau}-u_{g}\right\|+\left\|u_{g}-u_{a}\right\|+\left\|u_{a}-u^{e x}\right\|E XP I NN :=∥u τ−u e x ∥≤∥u τ−u g ∥+∥u g −u a ∥+∥u a −u e x ∥
其中,( u e x , u τ , u g , u a ) ( z ) = ∑ q = 1 N s d ( u q e x , u τ q , u g q , u a q ) ( z ) ⋅ 1 Ω q ( z ) \left(u^{e x}, u_{\tau}, u_{g}, u_{a}\right)(\mathbf{z})=\sum_{q=1}^{N_{s d}}\left(u_{q}^{e x}, u_{\tau_{q}}, u_{g_{q}}, u_{a_{q}}\right)(\mathbf{z}) \cdot \mathbb{1}{\Omega{q}}(\mathbf{z})(u e x ,u τ,u g ,u a )(z )=∑q =1 N s d (u q e x ,u τq ,u g q ,u a q )(z )⋅1 Ωq (z )

Remark:
* 当估计误差降低(数据拟合更好),泛化误差就会增加,这是一种bias variance trade-off,影响泛化误差的两个主要因素是the number and distribution of residual points
* 优化误差由损失函数的复杂性影响,网络结构深深影响优化误差
; 3.4 XPINN、cPINN,PINN对比
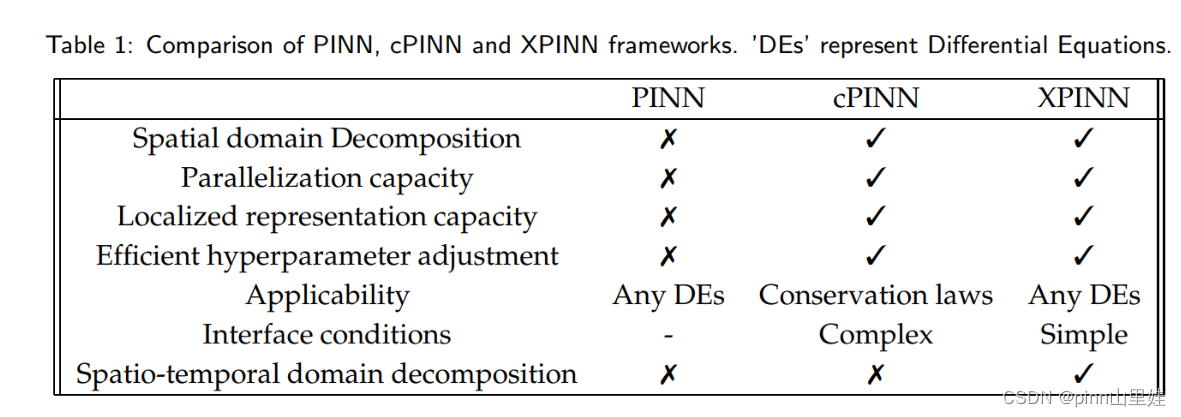
与PINN和cPINN框架相比,XPINN框架有很多优点,但是它也有一个与之前的框架相同的局限性。绝对误差
PDE解决方案,不会低于的水平,这是由于解决高维非凸优化问题所涉及的不准确性,可能会导致糟糕的极小值
Original: https://blog.csdn.net/weixin_45521594/article/details/125926625
Author: pinn山里娃
Title: Extended Physics-InformedNeural Networks论文详解
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/618949/
转载文章受原作者版权保护。转载请注明原作者出处!