

一、简介
本文主要介绍通过给定的两个空间向量,计算出从一个向量旋转到另一个向量的旋转矩阵。
二、步骤
① 假设两个向量分别为vectorBefore(x1,y1,z1), vectorAfter(x2,y2,z2),将这两个向量转为单位向量。
得到 va = normalize(vectorBefore), vb = normalize(vectorAfter)
② vs = vb × va, 叉乘得到旋转轴vs
③ v = normalize(vs), vs转为单位向量得到v
④ ca = vb · va, 点乘得到旋转角的余弦值 ca, 即cos(angle)
⑤ vt = v * scale, 对v进行缩放,方便后面计算, scale = 1 – ca
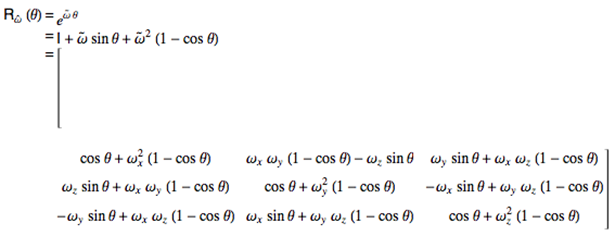
⑥ 旋转矩阵rm为 [3,3]矩阵, 计算原理为 罗德里格旋转公式(Rodrigues’ rotation formula)
rm[0,0] = vt.x * v.x + ca
rm[1,1] = vt.y * v.y + ca
rm[2,2] = vt.z * v.z + ca
vt.x *= v.y
vt.z *= v.x
vt.y *= v.z
rm[0,1] = vt.x – vs.z
rm[0,2] = vt.z – vs.y
rm[1,0] = vt.x – vs.z
rm[1,2] = vt.y – vs.x
rm[2,0] = vt.z – vs.y
rm[2,1] = vt.y – vs.x

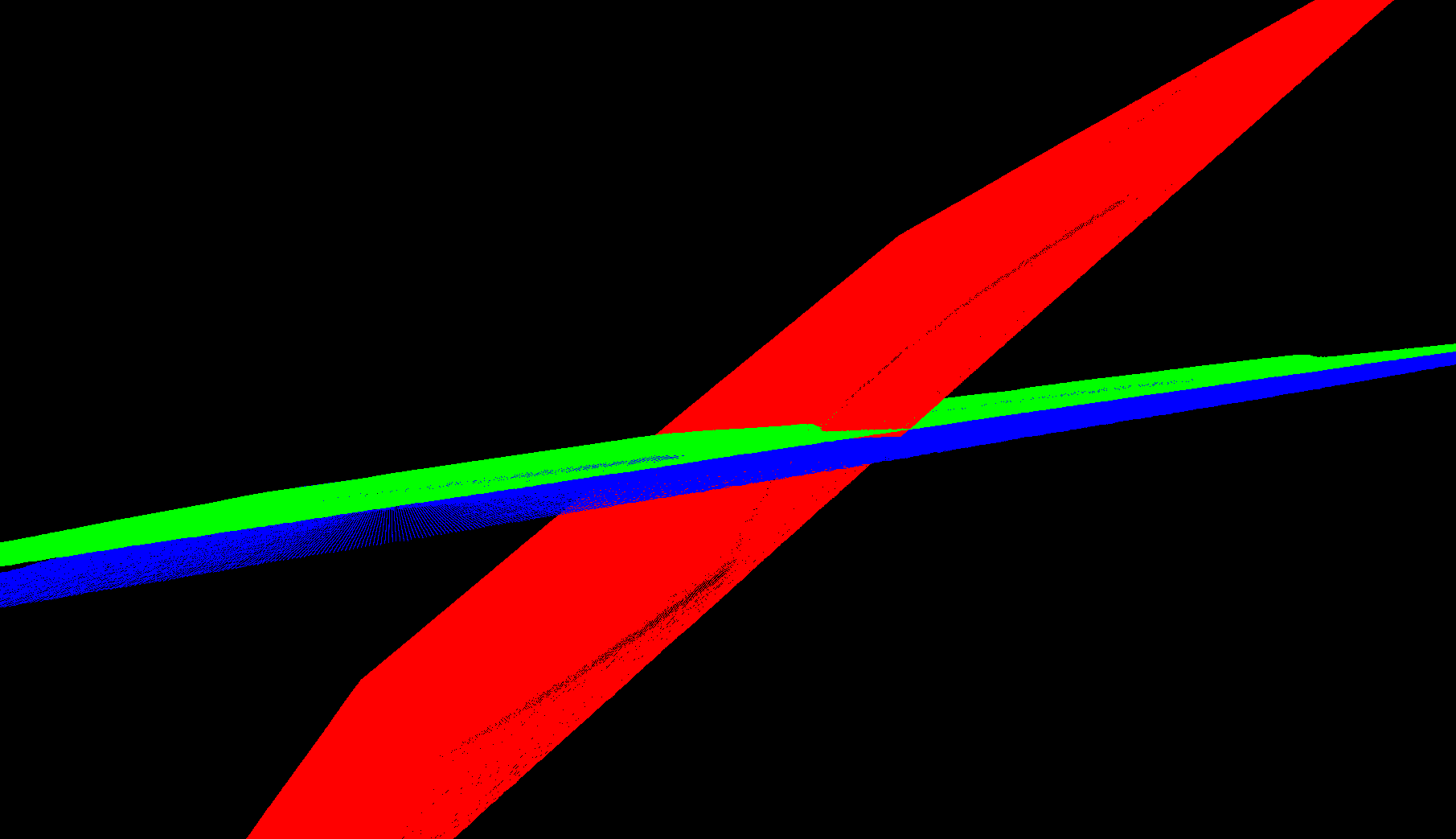
三、效果
红色为旋转前的平面,蓝色为旋转后的实际平面, 绿色是对红色平面应用计算的旋转矩阵后得到的平面,所以绿色与蓝色应在同一平面内。
四、代码
public struct Vec3
{
public float x;
public float y;
public float z;
public Vec3(float X, float Y, float Z)
{
x = X;
y = Y;
z = Z;
}
}
float[,] getRotationMatrix(Vec3 vectorBefore, Vec3 vectorAfter)
{
Vec3 vb = Normalize(vectorBefore);
Vec3 va = Normalize(vectorAfter);
Vec3 vs = CrossProduct(vb, va);
Vec3 v = Normalize(vs);
float ca = DotProduct(vb, va);
float scale = 1 - ca;
Vec3 vt = new Vec3(v.x * scale, v.y * scale, v.z * scale);
float[,] rotationMatrix = new float[3,3];
rotationMatrix[0, 0] = vt.x * v.x + ca;
rotationMatrix[1, 1] = vt.y * v.y + ca;
rotationMatrix[2, 2] = vt.z * v.z + ca;
vt.x *= v.y;
vt.z *= v.x;
vt.y *= v.z;
rotationMatrix[0, 1] = vt.x - vs.z;
rotationMatrix[0, 2] = vt.z + vs.y;
rotationMatrix[1, 0] = vt.x + vs.z;
rotationMatrix[1, 2] = vt.y - vs.x;
rotationMatrix[2, 0] = vt.z - vs.y;
rotationMatrix[2, 1] = vt.y + vs.x;
return rotationMatrix;
}
Vec3 CrossProduct(Vec3 a, Vec3 b)
{
Vec3 c = new Vec3()
{
x = a.y * b.z - a.z * b.y,
y = a.z * b.x - a.x * b.z,
z = a.x * b.y - a.y * b.x
};
return c;
}
float DotProduct(Vec3 a, Vec3 b)
{
return a.x * b.x + a.y * b.y + a.z * b.z;
}
Vec3 Normalize(Vec3 v)
{
float frt = (float)Math.Sqrt(v.x * v.x + v.y * v.y + v.z * v.z);
if (frt == 0.0f)
{
return new Vec3(0, 0, 0);
}
else
{
return new Vec3(v.x / frt, v.y / frt, v.z / frt);
}
}
五、调用库
以上是通过自己计算得出结果,其实eigen库中有输入两个向量得出旋转矩阵的接口,非常简单。
Eigen::Matrix3d rotMatrix;
Eigen::Vector3d vectorBef(vectorBefore[0], vectorBefore[1], vectorBefore[2]);
Eigen::Vector3d vectorAft(vectorAfter[0], vectorAfter[1], vectorAfter[2]);
rotMatrix = Eigen::Quaterniond::FromTwoVectors(vectorBef, vectorAft).toRotationMatrix();
Original: https://www.cnblogs.com/Clark-Zhang/p/16495263.html
Author: 朔月の流光
Title: 根据两个向量计算它们之间的旋转矩阵
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/582746/
转载文章受原作者版权保护。转载请注明原作者出处!