

介绍:
在lego-loam执行的过程中,建立的点云地图 以topic的形式发布出来.
运行lego-loam,出现rviz中订阅的话题和默认勾选如下:
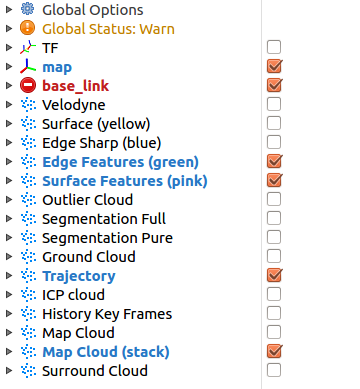

可以发现有两个map点云的话题,程序默认只勾选了下面一个map cloud(stack).
map cloud(stack)对应的话题为:/registered_cloud,此话题发布的是每一帧新加入地图的点云.使用栈的原理累加生成点云地图,当地图范围到一定程度时,就会丢弃最初建立的部分点云地图.
map cloud对应的才是 真正保存的全局地图,话题名为: /laser_cloud_surround.
保存地图:
在建图快要结束时,重新打开终端,订阅全局点云地图的话题,生成bag包:
rosbag record /laser_cloud_surround
耐心等待建图结束,ctrl+c结束录制.
此时查看重新打开的终端下,是否有bag包生成,如果录制成功,转bag为pcd:
rosrun pcl_ros bag_to_pcd name.bag /laser_cloud_surround pcd1
其中:
name.bag中的name为bag包的名字;
最后的pcd1的意思是在当前目录下创建一个名为pcd1文件夹,保存name.bag包中每一帧的/laser_cloud_surround话题生成的pcd点云文件,其中最后一个生成的(也是内存最大的)pcd文件即为建立的点云地图.
查看点云地图:
切换到pcd文件所在目录下,打开点云地图:
cd /pcd1
pcl_viewer name.pcd
其中name.pcd为对应点云地图的文件名.
Original: https://blog.csdn.net/qq_35102059/article/details/122626807
Author: 和道一文字_
Title: lego-loam建图时保存pcd点云地图,并查看
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/559162/
转载文章受原作者版权保护。转载请注明原作者出处!