

先上参考链接
【运动控制】Apollo6.0的mpc_controller解析
详细的车辆横向动力学模型推导参考我另一篇博客
Apollo control模块横向控制原理及核心代码逐行解析
因为和上述链接里LQR控制的代码及框架类似,因此在此仅代码不赘述,主要介绍原理
MPC横纵向控制原理






一.mpc_controller框架
代码参见apollo/modules/control/controller/mpc_controller.cc

1.1 注册控制器
\modules\control\conf\control_conf.pb.txt里active_controllers: MPC_CONTROLLER
active_controllers: MPC_CONTROLLER
在这里激活不同的控制器。
LQR+PID 激活 LON_CONTROLLER + LAT_CONTROLLER
MPC控制只激活 MPC_CONTROLLER,横纵向耦合控制
1.2 InitializeFilters
初始化3个lpf低通滤波器
digital_filter_:二阶数字滤波器,用于对方向盘角度控制指令滤波
lateral_error_filter_:均值低通滤波器,对横向误差CTE进行滤波,滤波窗口大小mean_filter_window_size在control_conf.pb.txt种被定义为10个周期
heading_error_filter_:均值低通滤波器,对航向误差进行滤波,滤波窗口大小mean_filter_window_size同lateral_error_filter_
1.3 Init
1.3.1 LoadControlConf
LoadControlConf:加载控制配置文件中的参数到MPCLatController类的数据成员中
1.3.2 初始化车辆状态方程矩阵
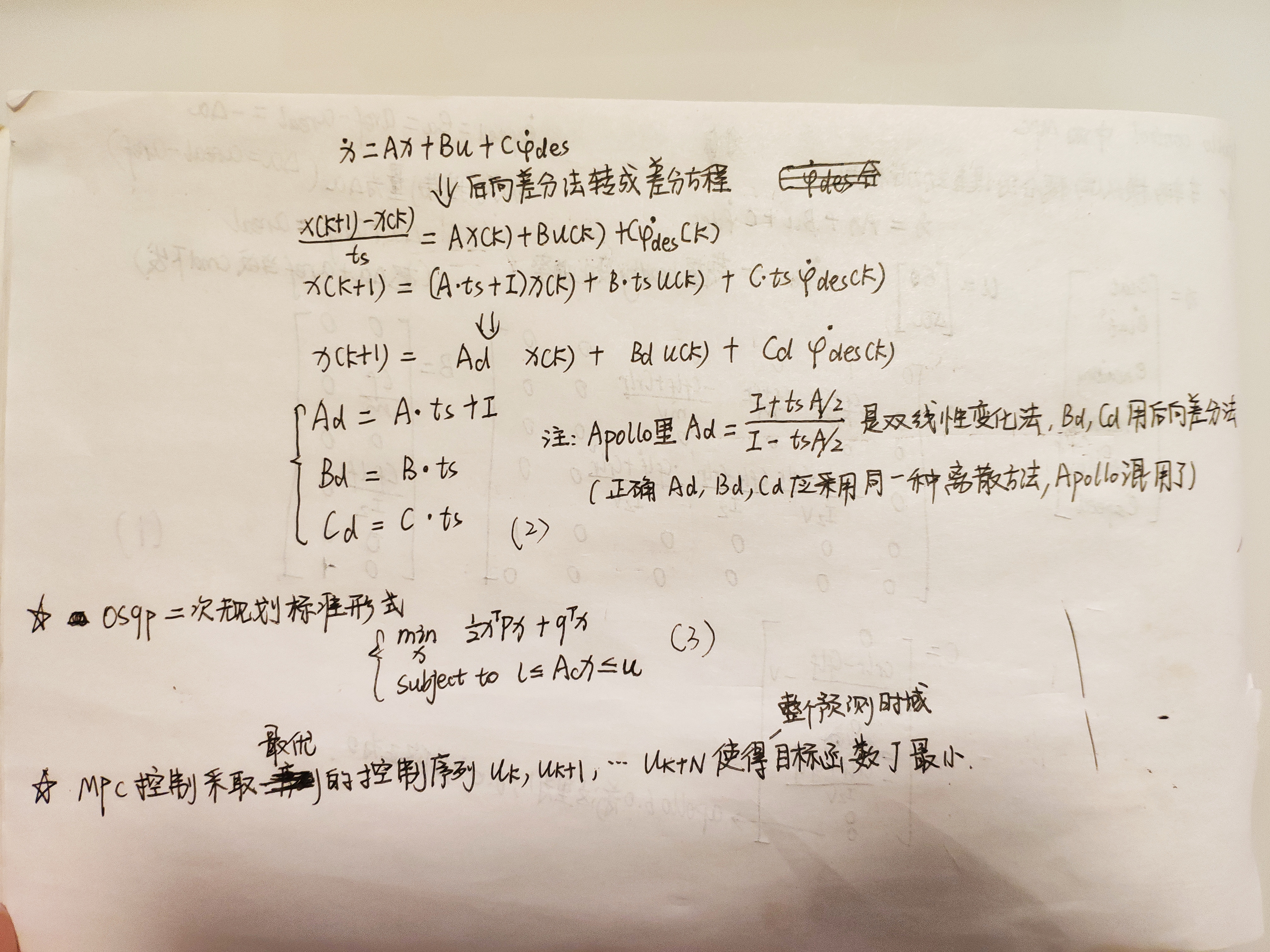
车辆横向状态方程
X’=AX+Bu+B1*(φdes)’
初始化
A矩阵中常项,含速度项的后续继续处理;
B矩阵全常项,并 x ts进行离散化;
B1初始化为4×1的0矩阵;
X状态矩阵初始化为4×1的0矩阵;
MPC中的Q矩阵初始化4×4的矩阵,从配置文件读取;
MPC中的R矩阵初始化为1×1的单位矩阵,从配置文件读取;
1.3.3 调用InitializeFilters初始化3个低通滤波器
1.3.4 LoadMPCGainScheduler
从控制配置加载增益调度表
总共有4个增益调度表
lat_err_interpolation_:加载控制配置文件中的横向误差随车速的增益表到MPCController类数据成员,车速越大,Q矩阵中横向误差的权重系数就越小
heading_err_interpolation_:加载控制配置文件中的航向误差随车速的增益表到MPCController类数据成员,车速越大,Q矩阵中航向误差的权重系数就越小,低速偏重于横向误差,高速偏重于航向误差。
feedforwardterm_interpolation_:前馈项的增益表
steer_weight_gain_scheduler:控制量的增益表,R矩阵中控制量的惩罚系数 x 这个根据车速插值出来的ratio,车速越高,控制量的惩罚系数越大,ratio越大
1.4 ComputeControlCommand
UpdateState
函数作用:
1.计算横向控制所需的各个误差项,量放入debug指针;
2.更新车辆的状态矩阵matrix_state_,直接从上一步debug指针中取出横向/航项误差/误差率
UpdateMatrix
主要是更新车辆状态方程里的矩阵A,B1中与速度相关的项
matrix_a_
matrix_c_
FeedforwardUpdate
steer_angle_feedforwardterm_
主要是更新车辆状态方程里的前馈项里包含速度相关项
利用gain_scheduler根据当前车速更新
横向误差惩罚系数,航向误差惩罚系数,前馈控制量,MPC控制量惩罚系数
定义各种过程矩阵及滚动时域的矩阵序列
调用MpcOsqp优化求解器
输入各种参数及约束,调用\modules\common\math\mpc_osqp.cc
调用MpcOsqp类的成员函数solve求解,求解的结果放入control控制序列里,取出第一个时刻的控制量下发。
这个控制量先进行转速限幅,滤波,再百分比限幅,最后下发。
1.5 UpdateState
函数作用:
1.调用ComputeLateralErrors计算横向控制所需的各个误差项,量放入debug指针;
2.更新车辆的状态矩阵matrix_state_,直接从上一步debug指针中取出横向/航项误差/误差率
1.6 UpdateMatrix
主要是更新车辆状态方程里的矩阵A,B1中与速度相关的项
matrix_a_
matrix_c_
1.7 FeedforwardUpdate
steer_angle_feedforwardterm_
主要是更新车辆状态方程里的前馈项里包含速度相关项
1.8 ComputeLateralErrors
计算横向误差相关量放入debug指针
二. mpc_osqp求解器
OSQP二次规划优化求解器,求解MPC问题,代码位于apollo/modules/common/math/mpc_osqp.cc里,定义了MpcOsqp类,主要实现了OSQP优化求解MPC问题的功能。
2.1 框架

2.2 带参构造函数MpcOsqp
输入矩阵Ad,Bd,Q,R,初始状态阵X0,控制量上下边界,状态量上下边界,参考状态(0矩阵),最大迭代次数mpc_max_iteration_,预测时域周期数horizon_,求解精度mpc_eps_,用输入参数去初始化类对象的数据成员
MpcOsqp::MpcOsqp(const Eigen::MatrixXd &matrix_a,
const Eigen::MatrixXd &matrix_b,
const Eigen::MatrixXd &matrix_q,
const Eigen::MatrixXd &matrix_r,
const Eigen::MatrixXd &matrix_initial_x,
const Eigen::MatrixXd &matrix_u_lower,
const Eigen::MatrixXd &matrix_u_upper,
const Eigen::MatrixXd &matrix_x_lower,
const Eigen::MatrixXd &matrix_x_upper,
const Eigen::MatrixXd &matrix_x_ref, const int max_iter,
const int horizon, const double eps_abs)
: matrix_a_(matrix_a),
matrix_b_(matrix_b),
matrix_q_(matrix_q),
matrix_r_(matrix_r),
matrix_initial_x_(matrix_initial_x),
matrix_u_lower_(matrix_u_lower),
matrix_u_upper_(matrix_u_upper),
matrix_x_lower_(matrix_x_lower),
matrix_x_upper_(matrix_x_upper),
matrix_x_ref_(matrix_x_ref),
max_iteration_(max_iter),
horizon_(horizon),
eps_abs_(eps_abs) {
state_dim_ = matrix_b.rows();
control_dim_ = matrix_b.cols();
ADEBUG << "state_dim" << state_dim_;
ADEBUG << "control_dim_" << control_dim_;
num_param_ = state_dim_ * (horizon_ + 1) + control_dim_ * horizon_;
}
state_dim_是状态矩阵的维度,等于矩阵Bd的行数
control_dim_是控制矩阵的维度,等于矩阵Bd的列数
num_param_是OSQP求解器待求解的变量X包含的参数个数

2.3 CalculateKernel
计算二次规划标准形式中的矩阵P

void MpcOsqp::CalculateKernel(std::vector *P_data,
std::vector *P_indices,
std::vector *P_indptr) {
// col1:(row,val),...; col2:(row,val),....; ...
std::vector>> columns;
columns.resize(num_param_);
size_t value_index = 0;
// state and terminal state
for (size_t i = 0; i emplace_back(ind_p);
for (const auto &row_data_pair : columns[i]) {
P_data->emplace_back(row_data_pair.second); // val
P_indices->emplace_back(row_data_pair.first); // row
++ind_p;
}
}
P_indptr->emplace_back(ind_p);
}
这个函数没有完全看明白,不过前两个for循环很好理解,就是将Q,R矩阵塞到QP问题的海森矩阵P里
2.4 CalculateGradient
计算二次规划标准形式中的矩阵q

// reference is always zero
void MpcOsqp::CalculateGradient() {
// populate the gradient vector
gradient_ = Eigen::VectorXd::Zero(
state_dim_ * (horizon_ + 1) + control_dim_ * horizon_, 1);
for (size_t i = 0; i < horizon_ + 1; i++) {
gradient_.block(i * state_dim_, 0, state_dim_, 1) =
-1.0 * matrix_q_ * matrix_x_ref_;
}
ADEBUG << "Gradient_mat";
ADEBUG << gradient_;
}
不过这里呢,因为Apollo输入的参考状态矩阵matrix_x_ref始终是0其实这个q也始终是0矩阵吧
2.5 CalculateEqualityConstraint

计算二次规划约束中的矩阵Ac

void MpcOsqp::CalculateEqualityConstraint(std::vector *A_data,
std::vector *A_indices,
std::vector *A_indptr) {
static constexpr double kEpsilon = 1e-6;
// block matrix
Eigen::MatrixXd matrix_constraint = Eigen::MatrixXd::Zero(
state_dim_ * (horizon_ + 1) + state_dim_ * (horizon_ + 1) +
control_dim_ * horizon_,
state_dim_ * (horizon_ + 1) + control_dim_ * horizon_);
Eigen::MatrixXd state_identity_mat = Eigen::MatrixXd::Identity(
state_dim_ * (horizon_ + 1), state_dim_ * (horizon_ + 1));
ADEBUG << "state_identity_mat" << state_identity_mat;
matrix_constraint.block(0, 0, state_dim_ * (horizon_ + 1),
state_dim_ * (horizon_ + 1)) =
-1 * state_identity_mat;
ADEBUG << "matrix_constraint";
ADEBUG << matrix_constraint;
Eigen::MatrixXd control_identity_mat =
Eigen::MatrixXd::Identity(control_dim_, control_dim_);
for (size_t i = 0; i < horizon_; i++) {
matrix_constraint.block((i + 1) * state_dim_, i * state_dim_, state_dim_,
state_dim_) = matrix_a_;
}
ADEBUG << "matrix_constraint with A";
ADEBUG << matrix_constraint;
for (size_t i = 0; i < horizon_; i++) {
matrix_constraint.block((i + 1) * state_dim_,
i * control_dim_ + (horizon_ + 1) * state_dim_,
state_dim_, control_dim_) = matrix_b_;
}
ADEBUG << "matrix_constraint with B";
ADEBUG << matrix_constraint;
Eigen::MatrixXd all_identity_mat =
Eigen::MatrixXd::Identity(num_param_, num_param_);
matrix_constraint.block(state_dim_ * (horizon_ + 1), 0, num_param_,
num_param_) = all_identity_mat;
ADEBUG << "matrix_constraint with I";
ADEBUG << matrix_constraint;
std::vector>> columns;
columns.resize(num_param_ + 1);
int value_index = 0;
// state and terminal state
for (size_t i = 0; i < num_param_; ++i) { // col
for (size_t j = 0; j < num_param_ + state_dim_ * (horizon_ + 1);
++j) // row
if (std::fabs(matrix_constraint(j, i)) > kEpsilon) {
// (row, val)
columns[i].emplace_back(j, matrix_constraint(j, i));
++value_index;
}
}
ADEBUG << "value_index";
ADEBUG << value_index;
int ind_A = 0;
for (size_t i = 0; i < num_param_; ++i) {
A_indptr->emplace_back(ind_A);
for (const auto &row_data_pair : columns[i]) {
A_data->emplace_back(row_data_pair.second); // value
A_indices->emplace_back(row_data_pair.first); // row
++ind_A;
}
}
A_indptr->emplace_back(ind_A);
}
按照分块矩阵往Ac里塞A,B,I
Eigen库Eigen::MatrixXd定义矩阵分块操作函数.block()的用法

2.7 CalculateConstraintVectors
计算二次规划约束中的上边界,下边界矩阵l,u


void MpcOsqp::CalculateConstraintVectors() {
// evaluate the lower and the upper inequality vectors
Eigen::VectorXd lowerInequality = Eigen::MatrixXd::Zero(
state_dim_ * (horizon_ + 1) + control_dim_ * horizon_, 1);
Eigen::VectorXd upperInequality = Eigen::MatrixXd::Zero(
state_dim_ * (horizon_ + 1) + control_dim_ * horizon_, 1);
for (size_t i = 0; i < horizon_; i++) {
lowerInequality.block(control_dim_ * i + state_dim_ * (horizon_ + 1), 0,
control_dim_, 1) = matrix_u_lower_;
upperInequality.block(control_dim_ * i + state_dim_ * (horizon_ + 1), 0,
control_dim_, 1) = matrix_u_upper_;
}
ADEBUG << " matrix_u_lower_";
for (size_t i = 0; i < horizon_ + 1; i++) {
lowerInequality.block(state_dim_ * i, 0, state_dim_, 1) = matrix_x_lower_;
upperInequality.block(state_dim_ * i, 0, state_dim_, 1) = matrix_x_upper_;
}
ADEBUG << " matrix_x_lower_";
// evaluate the lower and the upper equality vectors
Eigen::VectorXd lowerEquality =
Eigen::MatrixXd::Zero(state_dim_ * (horizon_ + 1), 1);
Eigen::VectorXd upperEquality;
lowerEquality.block(0, 0, state_dim_, 1) = -1 * matrix_initial_x_;
upperEquality = lowerEquality;
lowerEquality = lowerEquality;
ADEBUG << " matrix_initial_x_";
// merge inequality and equality vectors
lowerBound_ = Eigen::MatrixXd::Zero(
2 * state_dim_ * (horizon_ + 1) + control_dim_ * horizon_, 1);
lowerBound_ << lowerEquality, lowerInequality;
ADEBUG << " lowerBound_ ";
upperBound_ = Eigen::MatrixXd::Zero(
2 * state_dim_ * (horizon_ + 1) + control_dim_ * horizon_, 1);
upperBound_ << upperEquality, upperInequality;
ADEBUG << " upperBound_";
}
2.8 Solve
根据输入的矩阵求解二次规划,求解结果取出控制序列放入cmd中,然后cmd中第一个控制量就可以用于控制了。
bool MpcOsqp::Solve(std::vector *control_cmd)
Original: https://blog.csdn.net/weixin_39199083/article/details/123090846
Author: wujiangzhu_xjtu
Title: Apollo MPC横纵向耦合控制学习笔记
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558725/
转载文章受原作者版权保护。转载请注明原作者出处!