

以下内容为本人的著作,如需要转载,请声明原文链接微信公众号「englyf」 https://mp.weixin.qq.com/s/IS2lkMud7x_u0aZKar9z3w
最近在学习机器人相关的导航算法,为了方便于验证算法的效果,需要搭一个 ROS(Robot Operate System) 环境。特地写点笔记,这是这个机器人系列的首篇笔记。
虽然在网络上有很详细的教程,不过在对着教程一步步安装的过程中还是踩了不少坑。因为在墙内(你懂的),会导致联网下载文件的时候老是失败。可能你会说不可以指定墙内的安装源吗?可以是可以,不过在安装完 ROS 包后还需要初始化一些环境,比如 rosdep 的初始化,这时候还是需要从 github 联网下载文件的,这时就算指定了墙内的安装源也不管事,因为这个 github 的域名被污染了。下面就记录一下解决的过程吧,回首往事真的一把心酸。。。
基础环境:
Ubuntu 18.04
ROS Melodic
VMware® Workstation 14 Pro
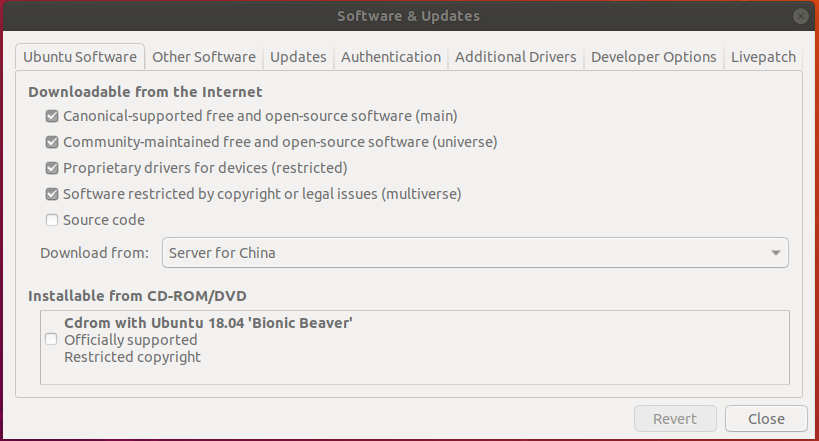
1.配置软件仓库
确保软件仓库里允许下载的资源类型包括 main, universe, restricted, multiverse。如下面图所示,

2.指定墙内的安装源
国内的安装源有好几个,还是觉得阿里的安装源比较快一些,直接拷贝下面的内容到 /etc/apt/sources.list 文件中替换原来的内容并且保存
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
单独指定 ROS 包的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.aliyun.com/ros/ubuntu/ lsb_release -cs main" > /etc/apt/sources.list.d/ros-latest.list'
3.指定密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
到目前为止,以上的设置都很顺利。如果这一步你刚好出错了,可以到这里去看看处理方法。
4.安装 ROS 包
更新一下安装索引
sudo apt update
安装完整的桌面版
sudo apt install ros-melodic-desktop-full
中间会出现提示
Do you want to continue? [Y/n]
输入 Y 然后回车继续安装过程,花点时间休息一下再回来。。。
回来一看
E: Failed to fetch http://mirrors.aliyun.com/ros/ubuntu/pool/main/r/ros-melodic-rqt-moveit/ros-melodic-rqt-moveit_0.5.10-1bionic.20210505.031448_amd64.deb Undetermined Error [IP: 120.241.234.99 80]
E: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?
出现了这一坨失败提示,后边还建议加个参数 --fix-missing 下载补漏,好的再来一次
sudo apt install ros-melodic-desktop-full --fix-missing
好了,安装完成
5.配置 ROS 环境变量
为了在每次启动 bash 时都自动载入 ROS 的环境变量,输入
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
配置完,重启一下 Terminal 窗口
6.安装一些关键的依赖包
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
中间又会出现提示
Do you want to continue? [Y/n]
输入 Y 然后回车继续安装过程
7.初始化 ROS 的依赖安装管理包 rosdep
rosdep 是 ROS 安装管理包。使用 ROS 过程中如果需要安装被 ROS 要编译的源代码,或被某些 ROS 核心组件依赖的包,那么就可以用 rosdep 来安装。使用前,这个包需要被初始化一次
sudo rosdep init
但是,在许多情况下,您会遇到以下错误提示
[En]
However, in many cases you will encounter the following error tips
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
报错内容的意思说白了就是说域名 raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list 的页面找不到了。真实情况其实是这个地址的域名因为众所周知的原因被污染了,并不是页面已经下架。
我是这么处理的,在网上搜一下关键词 域名查IP 找到可以查域名对应 IP 的网站,然后根据查到的 IP 来修改 主机名静态查询表 文件。如果网站告诉你 禁止查询该域名,那就再换一个网站再查,多大点事!
我这里页面返回的结果是
物理地址 IP地址 数字地址 美国加利福尼亚旧金山 185.199.108.133 3116854405 美国加利福尼亚旧金山 185.199.111.133 3116855173 美国加利福尼亚旧金山 185.199.110.133 3116854917 美国加利福尼亚旧金山 185.199.109.133 3116854661 打开 /etc/hosts
文件,这个就是 主机名静态查询表
sudo gedit /etc/hosts
对应上边查到的 IP 地址,把下面的内容拷贝追加到 /etc/hosts 的尾部并保存
185.199.108.133 raw.githubusercontent.com
185.199.111.133 raw.githubusercontent.com
185.199.110.133 raw.githubusercontent.com
185.199.109.133 raw.githubusercontent.com
然后,再试一次
~$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
成功通过此级别,然后执行更新。
[En]
Successfully pass this level, and then perform an update.
~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
ERROR: error loading sources list:
('The read operation timed out',)
不幸的是,访问再次失败,现在报告读取操作超时。我已经试了好几次了,但还是无能为力。看起来我要用一个大把戏了。
[En]
Unfortunately, the access failed again, and now it is reported that the read operation timed out. I’ve tried it again for several times, but there’s nothing I can do about it. It looks like I’m going to use a big trick.
上面说白了就是读 github 网站的资源不稳定,那么我们就找一个 github 的代理资源吧。刚好我这认识一个 https://ghproxy.com/ 支持对 github 资源代理加速,速度非常好,目前是的。
下面是应用加速代理
打开文件,这里注意一下 ROS Melodic 用的是 python2
sudo gedit /usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
找到函数 download_rosdep_data,把变量 url 赋值成
url = "https://ghproxy.com/" + url
修改后效果
def download_rosdep_data(url):
"""
:raises: :exc:DownloadFailure If data cannot be
retrieved (e.g. 404, bad YAML format, server down).
"""
try:
# http/https URLs need custom requests to specify the user-agent, since some repositories reject
# requests from the default user-agent.
url = "https://ghproxy.com/" + url
if url.startswith("http://") or url.startswith("https://"):
url_request = request.Request(url, headers={'User-Agent': 'rosdep/{version}'.format(version=__version__)})
else:
url_request = url
f = urlopen(url_request, timeout=DOWNLOAD_TIMEOUT)
text = f.read()
f.close()
data = yaml.safe_load(text)
if type(data) != dict:
raise DownloadFailure('rosdep data from [%s] is not a YAML dictionary' % (url))
return data
except (URLError, httplib.HTTPException) as e:
raise DownloadFailure(str(e) + ' (%s)' % url)
except yaml.YAMLError as e:
raise DownloadFailure(str(e))
打开下面的几个文件,在所有找到的 https://raw.githubusercontent.com 字符串前添加上 https://ghproxy.com/ 保存即可。
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
/usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py
不过,对于文件 /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py 里函数 download_gbpdistro_as_rosdep_data 的输入参数 gbpdistro_url 在应用前也需要补上加速地址
def download_gbpdistro_as_rosdep_data(gbpdistro_url, targets_url=None):
"""
Download gbpdistro file from web and convert format to rosdep distro data.
DEPRECATED: see REP137. This function will output
(at least) one deprecation warning
:param gbpdistro_url: url of gbpdistro file, DownloadFailure
:raises: :exc:InvalidData If targets file does not pass cursory
validation checks.
"""
# we can convert a gbpdistro file into rosdep data by following a
# couple rules
# will output a warning
targets_data = download_targets_data(targets_url=targets_url)
gbpdistro_url = "https://ghproxy.com/" + gbpdistro_url
try:
f = urlopen(gbpdistro_url, timeout=DOWNLOAD_TIMEOUT)
text = f.read()
f.close()
gbpdistro_data = yaml.safe_load(text)
# will output a warning
return gbprepo_to_rosdep_data(gbpdistro_data,
targets_data,
gbpdistro_url)
except Exception as e:
raise DownloadFailure('Failed to download target platform data '
'for gbpdistro:\n\t' + str(e))
好了,所有的大动作都完成了。让我们看看它是如何工作的。
[En]
All right, all the big moves are done. Let’s see how it works.
~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://ghproxy.com/https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Add distro "foxy"
Add distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Add distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/if/.ros/rosdep/sources.cache
8.测试一下环境
在各自的终端中独立和顺序地执行以下指令
[En]
Execute the following instructions in their respective terminals independently and sequentially
// 启动 ROS 核心
roscore
// 启动 ROS 仿真平台
rosrun turtlesim turtlesim_node
// 接收方向键按键信息
rosrun turtlesim turtle_teleop_key
在最终终端按下键盘键,控制模拟窗口中的小乌龟。
[En]
Press the keyboard key in the final terminal to control the small tortoise in the simulation window.
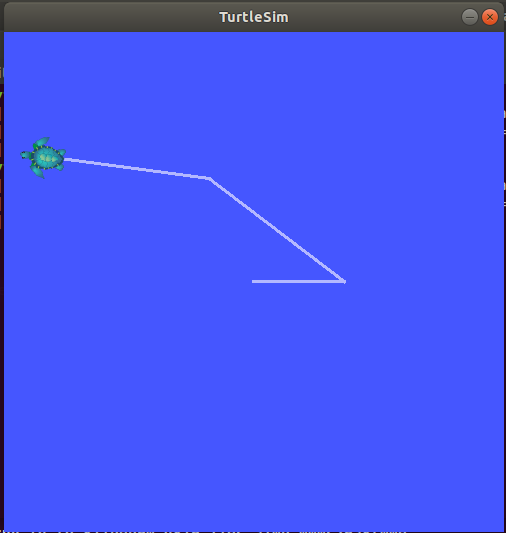
如果你能顺利走到这里,说明 ROS 环境可以正常跑了。
后记:
其实写这篇笔记的过程中,除了首次配置环境,还穿插了很多任务,导致配置的过程一直停滞不前,笔记也落下那么久才发出来。如果你在对照这篇笔记来配置 ROS 环境的时候也碰到了其它的问题,欢迎留言提出来,或者添加我的微信公众号englyf给我留言?毕竟博客不一定一直在线。
Original: https://www.cnblogs.com/englyf/p/16660252.html
Author: englyf八戒
Title: 踩坑之旅:配置 ROS 环境
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/522749/
转载文章受原作者版权保护。转载请注明原作者出处!