

本人小白,寒假期间学习了一些ROS知识,试着在虚拟机搭建ORB_SLAM3环境并跑通数据集和摄像头,作本文以记录学习过程。所有用到的资源(软件安装包,镜像文件,库的源码文件都会放在最后百度网盘链接里)
目录
1.安装VMware Workstation Pro和Ubuntu18.04
4.编译ORB_SLAM3并在非ROS环境下跑通数据集&跑自己录制的Video
0.something you should know
#你需要知道什么是终端,怎么唤起终端
CTRL+ALT+T #唤起一个终端
#当需要在特定的文件夹里输入指令,进入文件夹后右键打开终端即可
cd xxx #进入xxx文件夹
cd .. #返回上一层
./XXXX 运行当前终端目录里的XXXX文件
#当运行 sudo ..................之类的指令时,自己输入的密码不会显示出来,但实际上
已经输入了,输完按下回车即可
#暂停正在运行的任务CTRL+C
在文件夹打开的终端里sudo gedit 文件名 #修改有读取权限的文件
TAB键可以智能自动补全,如打开857qwsa文件
输入 sudo gedit 85后按下TAB即可补全名称,在运行某个节点时也同理
1.安装 VMware Workstation Pro和Ubuntu18.04

先安装第二个软件,然后根据 网上的教程,选用第一个文件作为镜像,创建虚拟机。
进入虚拟机,完成基本配置。
静心等待安装过程。。。。。。。。。。。。。。。。
完成后你会发现不是全屏,也不能在win和虚拟机之间拖拽文件和复制代码。
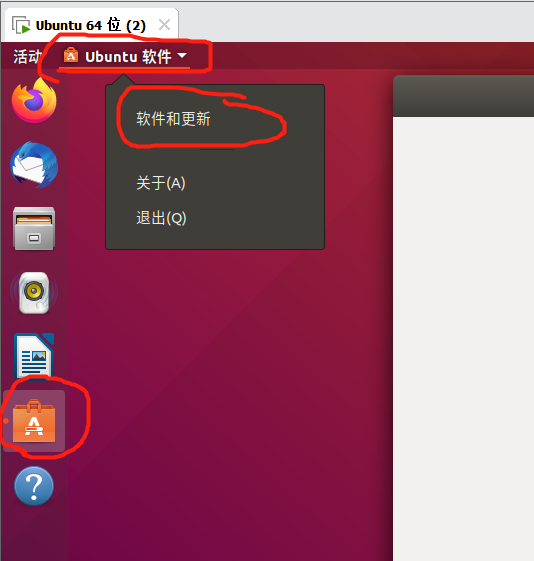
换成aliyun的源(根据自身选择)

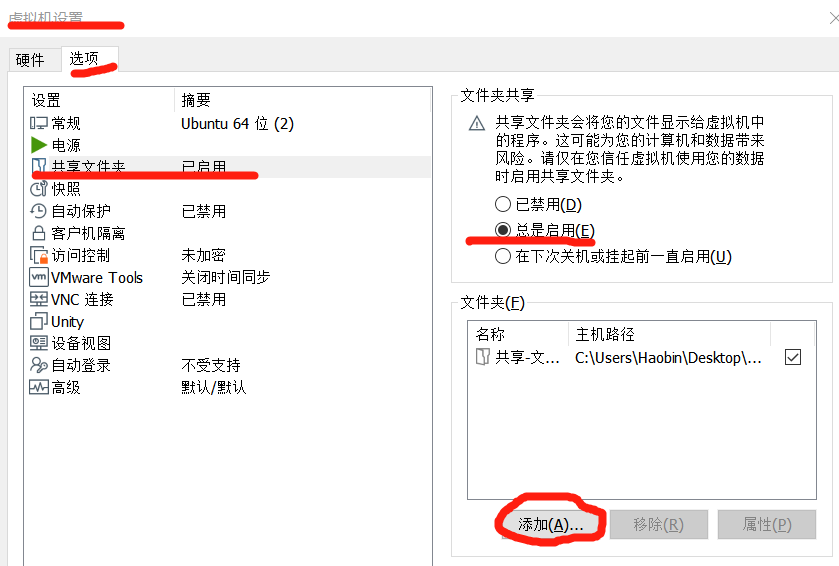
创建共享文件夹(选做)
选择一个win的文件夹作为共享文件夹,如图操作。
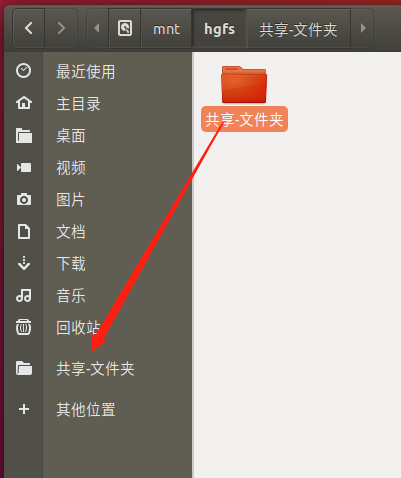
然后在虚拟机里/mnt/hgfs/能找到win对应的文件夹,为了方便可以把文件夹拖到左侧创建便捷书签。
然后就能在win和虚拟机之间复制粘贴(没下面的 VMware Tools方便,但也能作为一个小知识)
安装VMware Tools(全屏,在win和虚拟机之间直接拖拽文件和复制代码等等。。。)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' #换源
sudo apt-get autoremove open-vm-tools #卸载已有的工具
sudo apt-get install open-vm-tools #安装工具open-vm-tools
sudo apt-get install open-vm-tools-desktop #安装open-vm-tools-desktop
然后关机重启虚拟机,就可以在win和虚拟机里直接拖拽文件和复制代码了!!(舒服嘿嘿)
2.安装ROS
终端
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 #导入密匙
接着依次执行
sudo apt-get update #更新软件库
sudo apt-get install ros-melodic-desktop-full #ROS桌面完整版
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential #安装一些软件
软件更新完,如果有网址忽略啥的可以多刷几遍,跟网络状况有关
安装软件可能有点慢,一路yes+回车就行
接下来到了第一个难点(建议按照本文操作,亲自尝试可以搞定的。)
第一步,sudo apt-get install python3-pip;第二步,sudo pip3 install rosdepc;然后
sudo rosdepc init;最后rosdepc update,完美解决再次感谢。
成功的话跳到
打开一个终端,依次执行以下
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
检测
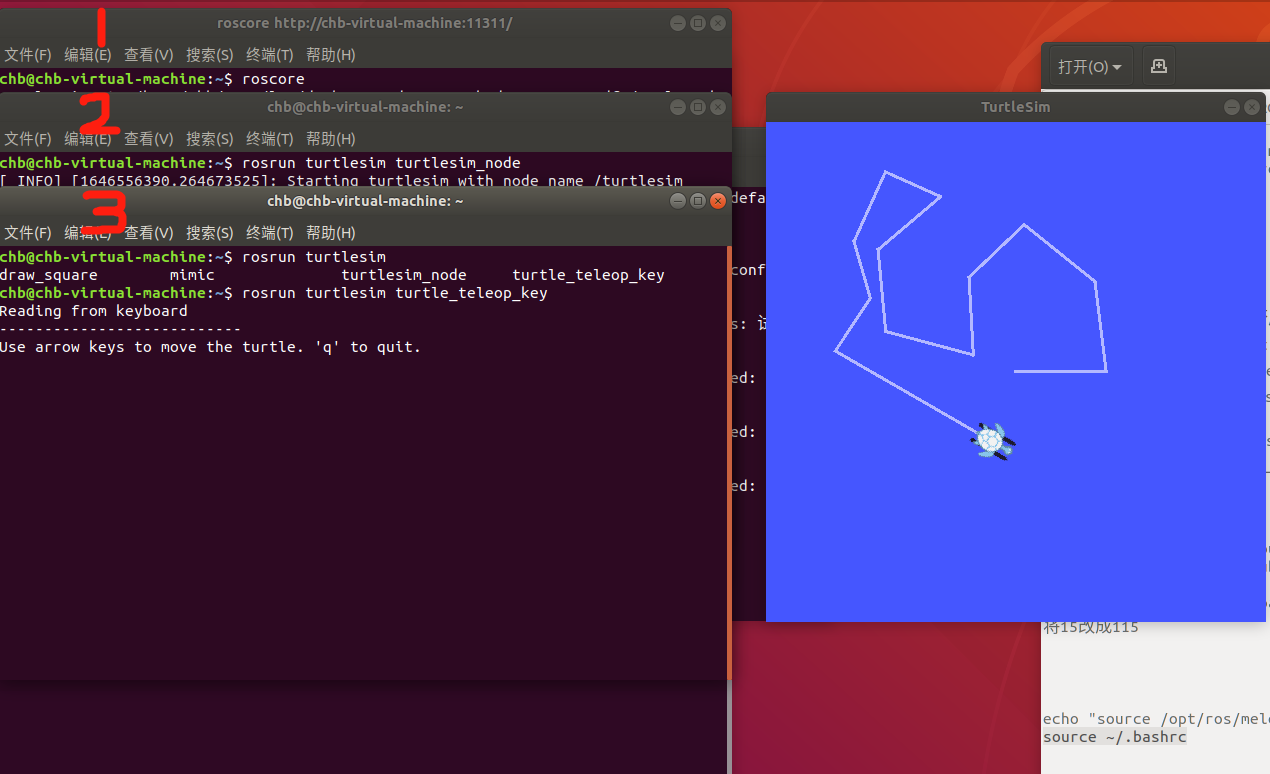
检测ROS是否安装成功,依次 1输指令,运行。。 2输指令,运行。。 3输指令,运行。。 把鼠标放在第三个终端里,通过键盘↑↓←→能控制小乌龟运动即可,表明完成了第二大步ROS的安装!!!!!(每次打开第二个节点生成的乌龟都是随机的,QWQ)
3.安装ORB_SLAM3所需的各种库和依赖
Pangolin安装:
压缩包解压到本地,然后直接将文件夹拖进虚拟机
终端
安装依赖项 #一路yes
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev
sudo apt-get install libpng-dev
配置并编译
cd Pangolin-0.6
mkdir build && cd build
cmake -DCPP11_NO_BOOST=1 ..
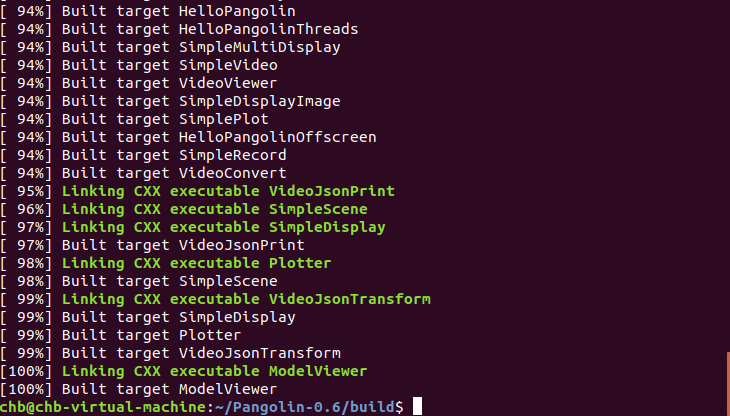
make -j
sudo make install
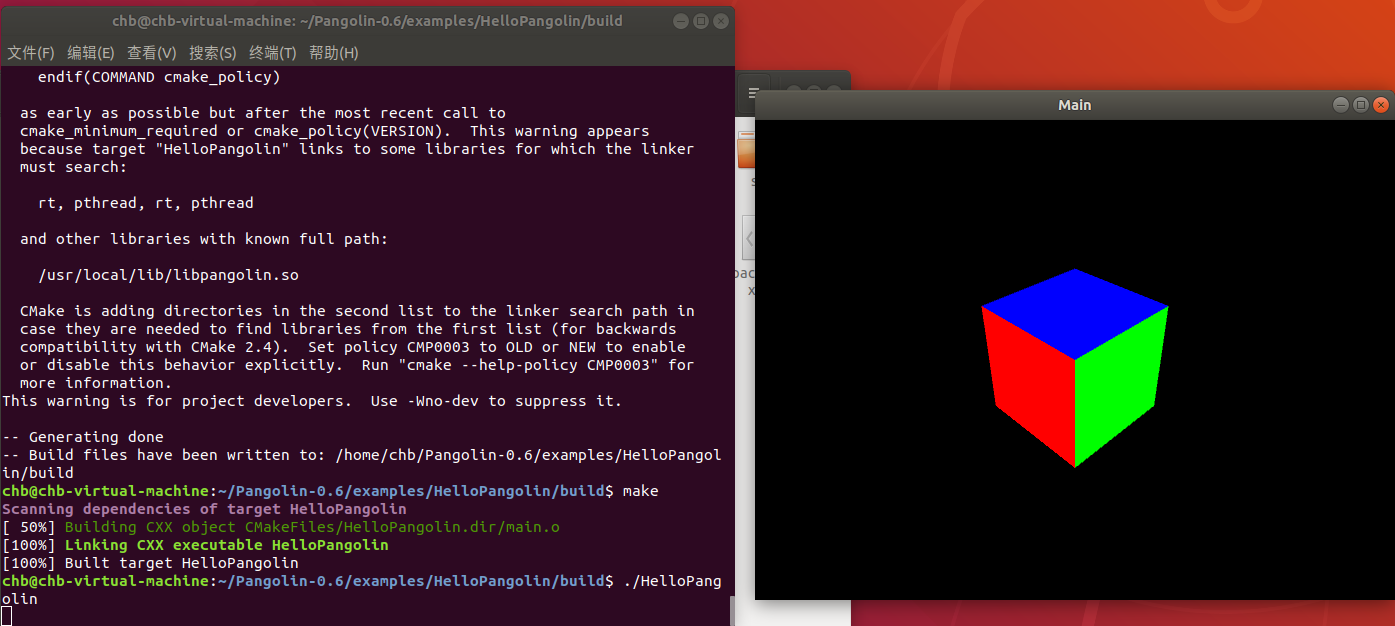
验证
cd ..
cd examples/HelloPangolin
mkdir build && cd build
cmake ..
make
./HelloPangolin
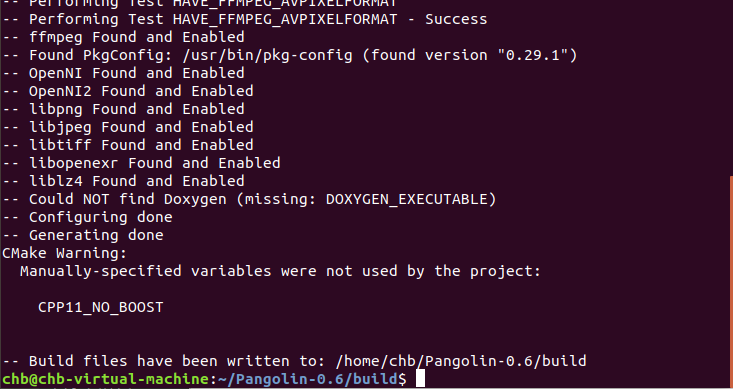
配置的前三步完成后,warning不用管,只要没报错就行
(对于大型项目,在使用cmake控制编译时,仅仅执行make指令效率较低,使用make -j后面跟一个数字,比如make -j4 make -j6 make -j14等。)
验证按照步骤来,若安装成功,则会出现以下图片
OpenCV安装:
安装依赖项
sudo add-apt-repository "deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe" #一遍即可
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main" #一遍即可
sudo apt update
sudo apt install libjasper1 libjasper-dev
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff5.dev libswscale-dev libjasper-dev
sudo apt install libcanberra-gtk-module libcanberra-gtk3-module
配置并编译
OpenCV文件夹内打开终端
mkdir build && cd build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j
sudo make install #别忘了
#添加库路径
sudo /bin/bash -c 'echo "/usr/local/lib" > /etc/ld.so.conf.d/opencv.conf'
#更新系统库
sudo ldconfig
#配置bash
sudo gedit /etc/bash.bashrc
在末端添加以下代码
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
#保存,执行如下命令使得配置生效:
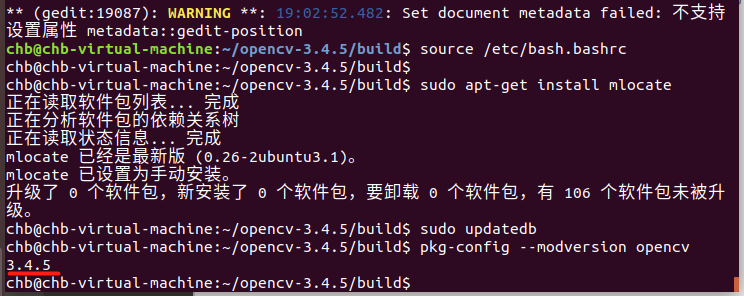
source /etc/bash.bashrc
sudo apt-get install mlocate
#更新
sudo updatedb
#opencv版本检测
pkg-config --modversion opencv
成功
Eigen3安装:
#安装
cd eigen-git-mirror
mkdir build
cd build
cmake ..
sudo make install
DBoW2 and g2o 安装:
sudo apt-get install cmake libeigen3-dev libsuitesparse-dev qtdeclarative5-dev qt5-qmake libqglviewer-dev #g2o的依赖项
sudo apt-get install libboost-dev #DBoW2的依赖项
Libpython2.7-dev安装:
sudo apt install libpython2.7-dev
安装boost库:

进入解压出来的文件夹,打开终端
sudo ./bootstrap.sh
sudo ./b2 install
sudo apt-get install libssl-dev
fmt安装:

cd fmt
mkdir build
cd build
cmake ..
make
sudo make install
Sophus 安装:
cd Sophus/
mkdir build
cd build
cmake ..
make
sudo make install
在这里强调!不要回滚git checkout a621ff,否则会装成老版本的非模板sophus(网上大多教程都有回滚)
千万不要回滚!!!!!且强调sudo make install一定要有
4.编译ORB_SLAM3并在非ROS环境下跑通数据集&跑自己录制的Video

在文件夹内打开终端(在一个终端里依次输入以下指令并运行)
.........................................................................................
echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../../
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz


在ORB_SLAM3-master文件夹内打开终端,依次输入
echo "Configuring and building ORB_SLAM3 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
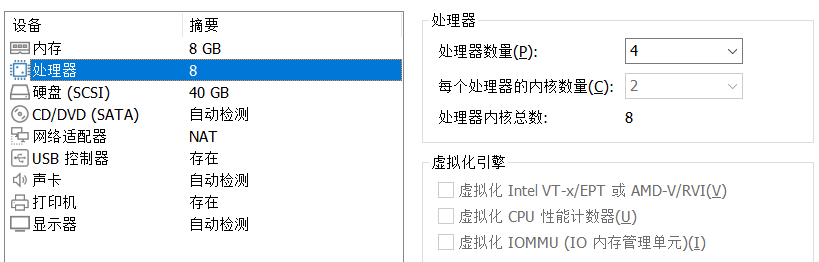
make -j #make -j4更快,根据自己给虚拟机的配置而定
在执行make-j若出现以下报错时,可以尝试make不使用-jx多核编译。

回到build文件夹,终端make等待完成即可
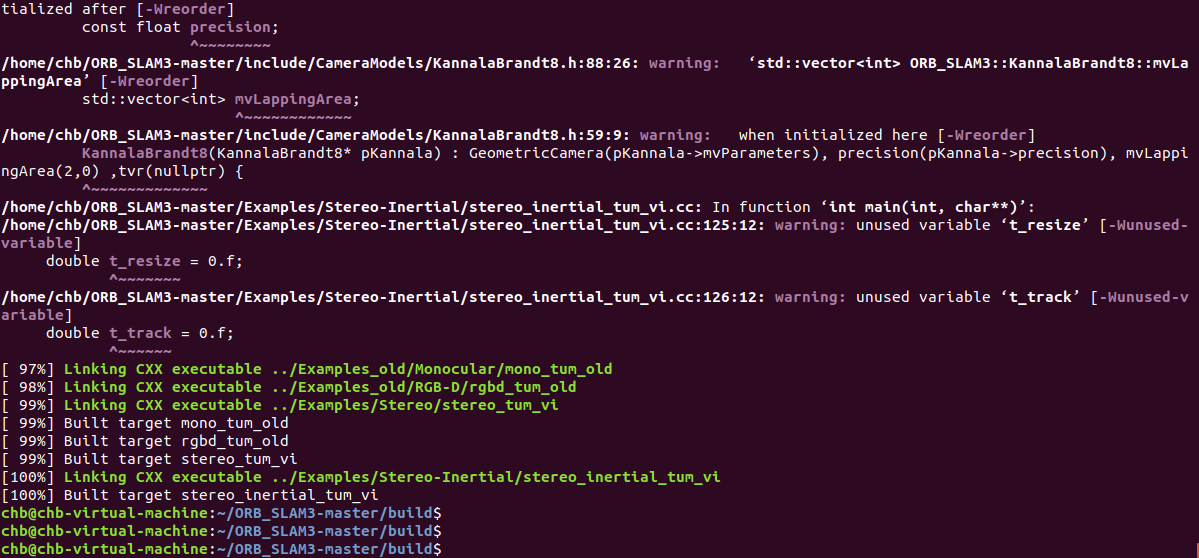
ORB_SLAM3源码编译完成
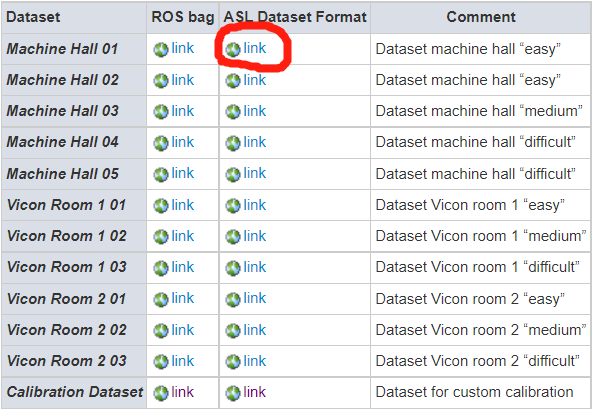
接下来跑官方数据集kmavvisualinertialdatasets – ASL Datasets
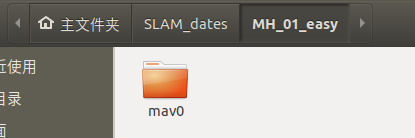
在主文件夹下新建一个名为SLAM_dates 的文件夹
创建对应压缩包的名字的文件夹,例如MH_01_easy
将压缩包里的mv0放入 MH_01_easy中
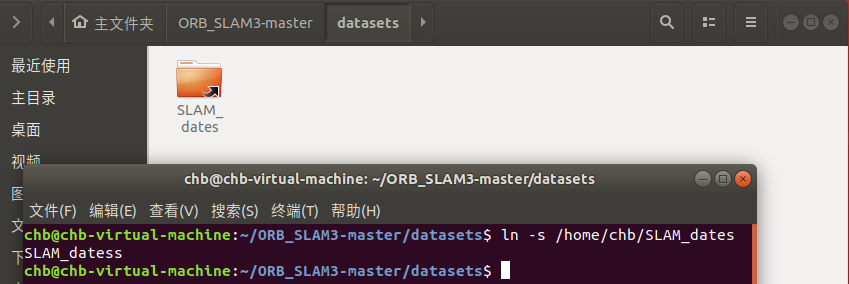
打开ORB_SLAM3-master文件夹
建立一个名为 datasets 的文件夹,并进入,进入后打开终端
ln -s /home/你的用户名,我是chb/SLAM_dates SLAM_dates #建立软连接
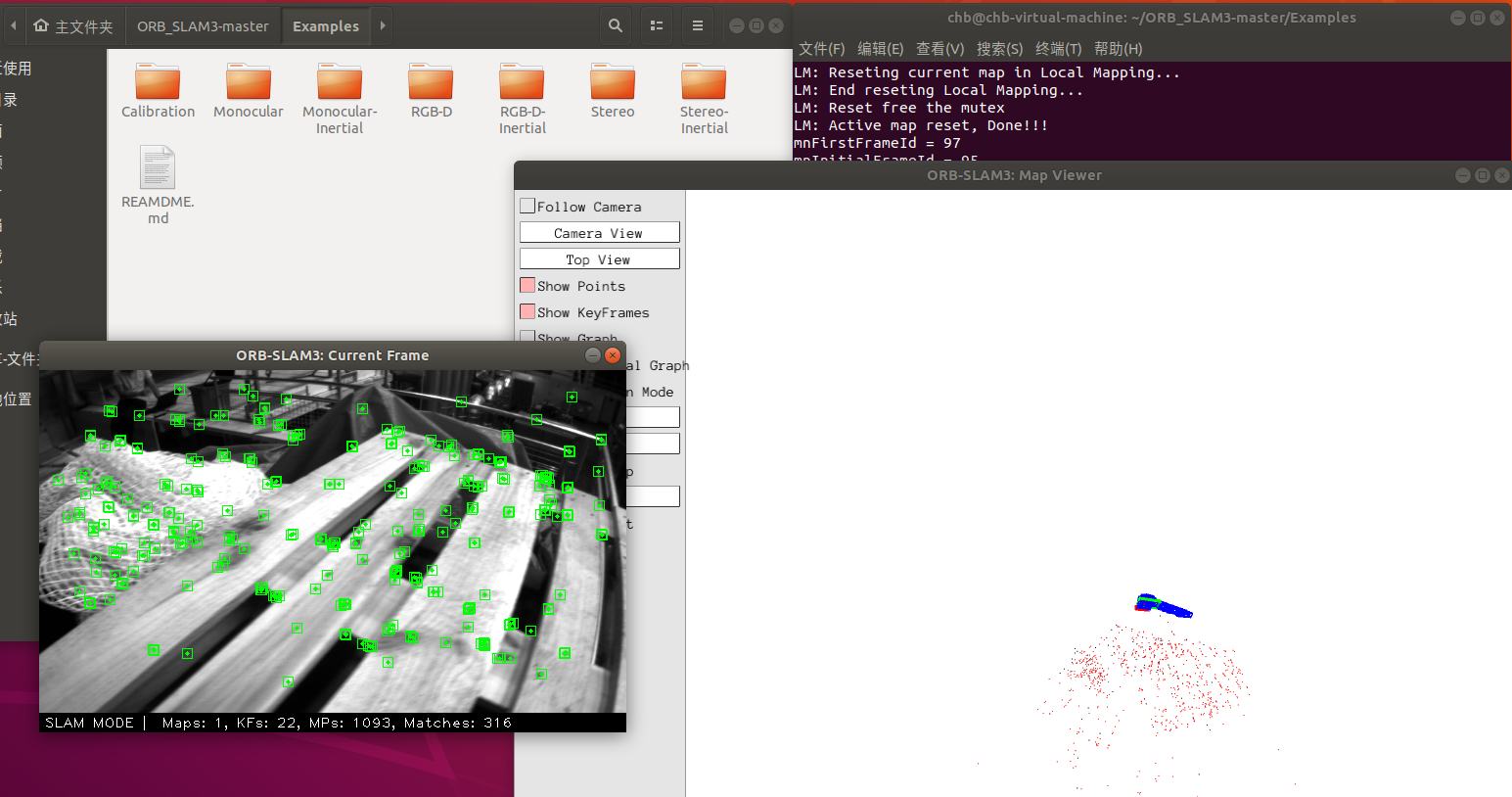
在Examples文件夹下执行下述命令,跑数据集
./Monocular-Inertial/mono_inertial_euroc ../Vocabulary/ORBvoc.txt ./Monocular-Inertial/EuRoC.yaml ../datasets/SLAM_dates/MH_01_easy ./Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_monoi
运行其他ASL格式的数据集,只需修改命令行中的 MH_01_easy 、 MH01.txt 和 MH01_monoi
关于跑自己录制的视频文件
将 视频文件(mp4即可) 名字.cc名字.yaml 放入Monocular文件夹
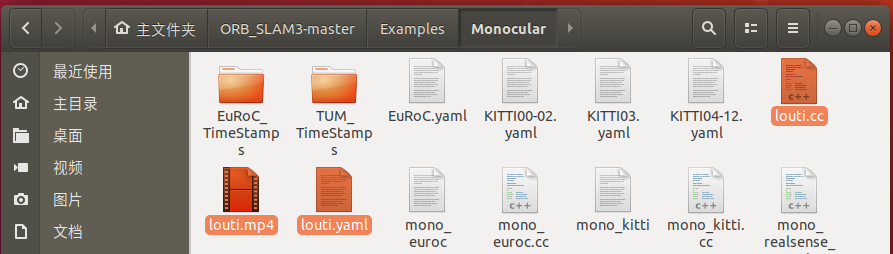
修改后两个文件的名字
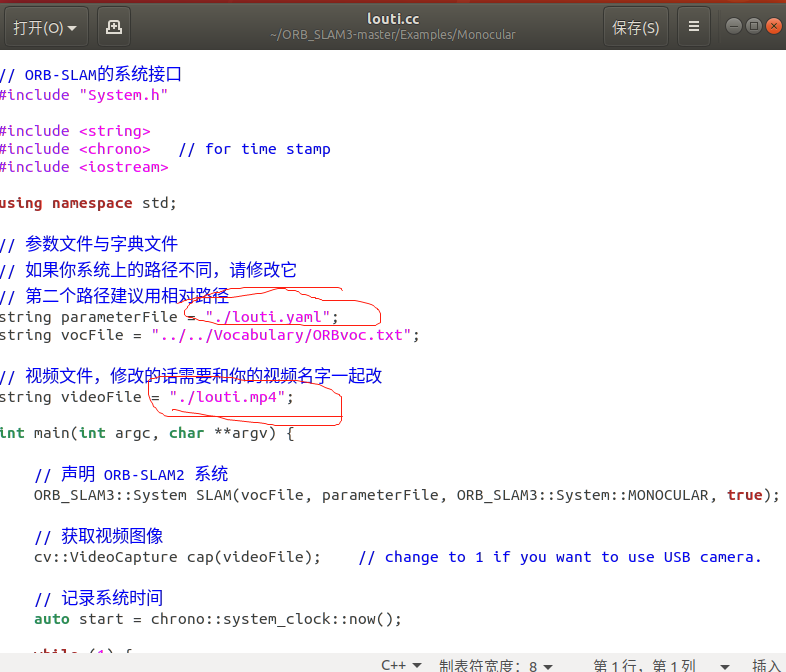
修改.cc文件内容
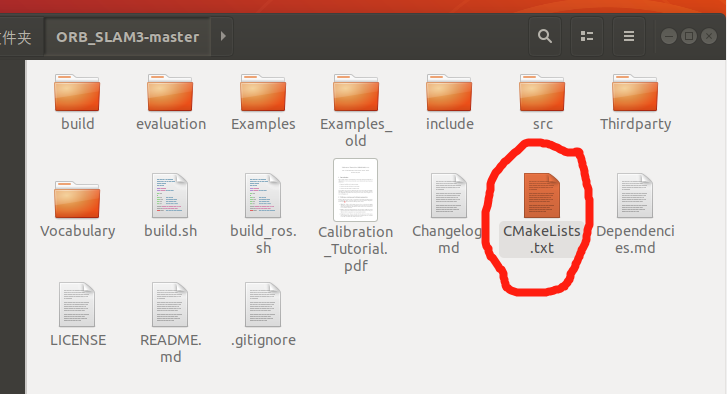
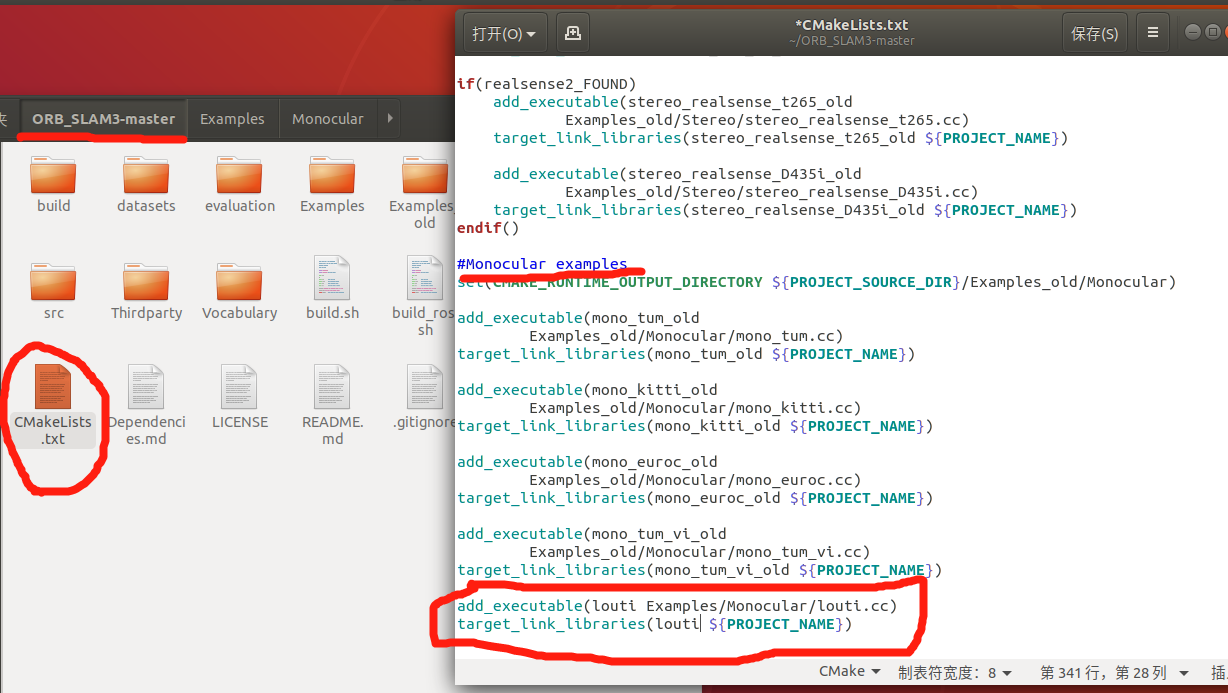
修改Cmakelist.txt文件内容
删除Build文件夹重新编译ORB_SLAM3
在Monocular里出现可执行文件。
运行./xxxxxx即可
放进去
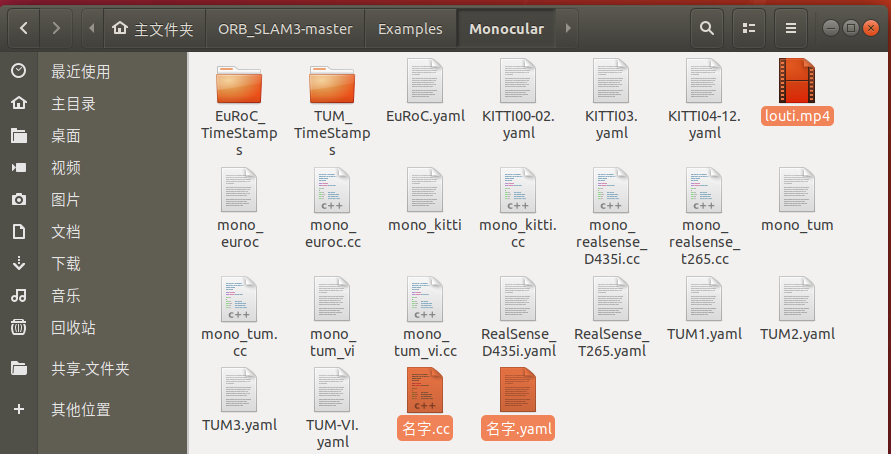
改名字
修改xxxx.cc文件内容,改成自己视频的名字。
修改CMakeLists.txt
删除build文件夹(3个)并重新编译ORB_SLAM3
在文件夹内打开终端(在一个终端里依次输入以下指令并运行)
.........................................................................................
echo "Configuring and building Thirdparty/DBoW2 ..."
cd Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../g2o
echo "Configuring and building Thirdparty/g2o ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j
cd ../../../
echo "Uncompress vocabulary ..."
cd Vocabulary
tar -xf ORBvoc.txt.tar.gz
cd ..
echo "Configuring and building ORB_SLAM3 ..."
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make #make -j4更快,根据自己给虚拟机的配置而定,可能会出现内存报错
耐心等待----------
复制过去,如下图
./louti #换成你的可执行文件名字
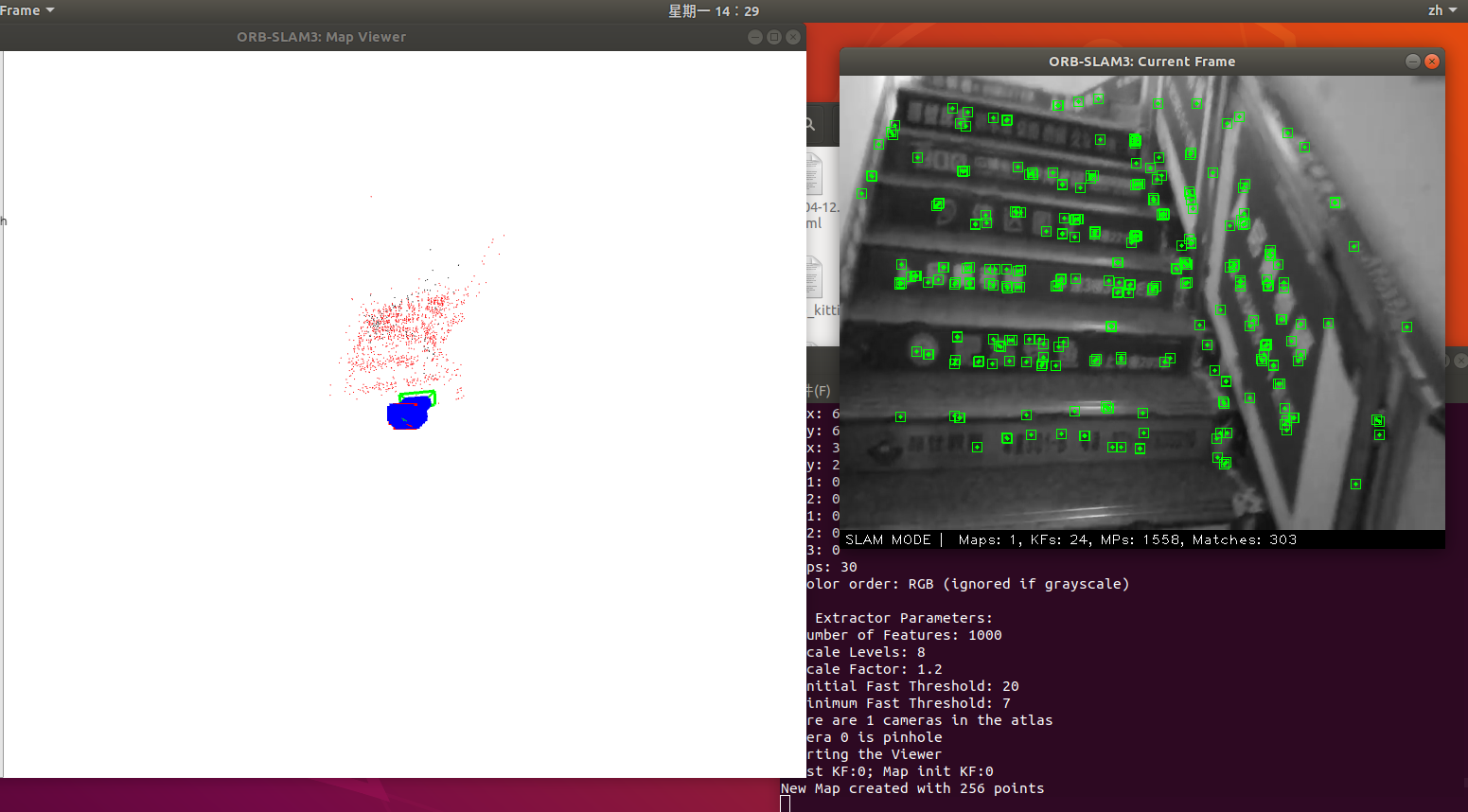
效果图
5.编译ORB_SLAM3ROS接口实时跑USB单目摄像头
1.创建一个工作空间,我的是catkin_ws
1.创建工作空间
mkdir catkin_ws //创建文件夹
cd catkin_ws
mkdir src
cd src
catkin_init_workspace //初始化工作空间
2.编译工作空间
cd ~/catkin_ws/
catkin_make
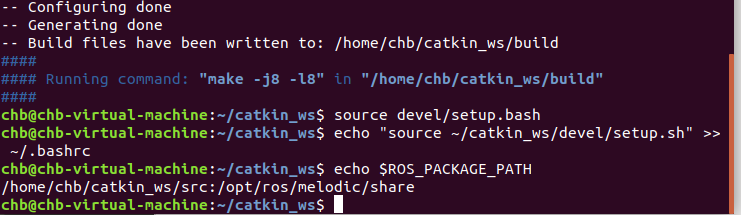
3.设置环境变量
source devel/setup.bash
4.永久添加环境变量:
echo "source ~/catkin_ws/devel/setup.sh" >> ~/.bashrc
5.检验环境变量
echo $ROS_PACKAGE_PATH
2.将整个文件夹复制到工作空间的src文件夹里。
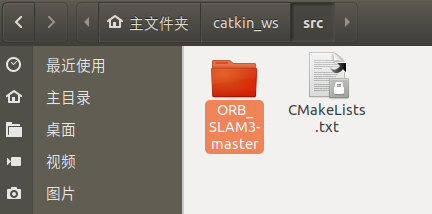
3.
本人Q1945626852,欢迎各位大佬在评论区留言!
未完待续。。。
Original: https://blog.csdn.net/chb1945626852/article/details/123311420
Author: E丶piphany
Title: Ubuntu18.04跑通ORB_SLAM3(实时USB单目摄像头&本地视频.mp4&官方数据集)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/519853/
转载文章受原作者版权保护。转载请注明原作者出处!