

目录
一、原始需求
Linux下基于qt的视频监控系统
- 服务端: 用v4l2实现视频采集、视频传输,用tcp实现服务器端与客户端通信
- 客户端:用qt实现
功能:
1、注册登录
2、暂停
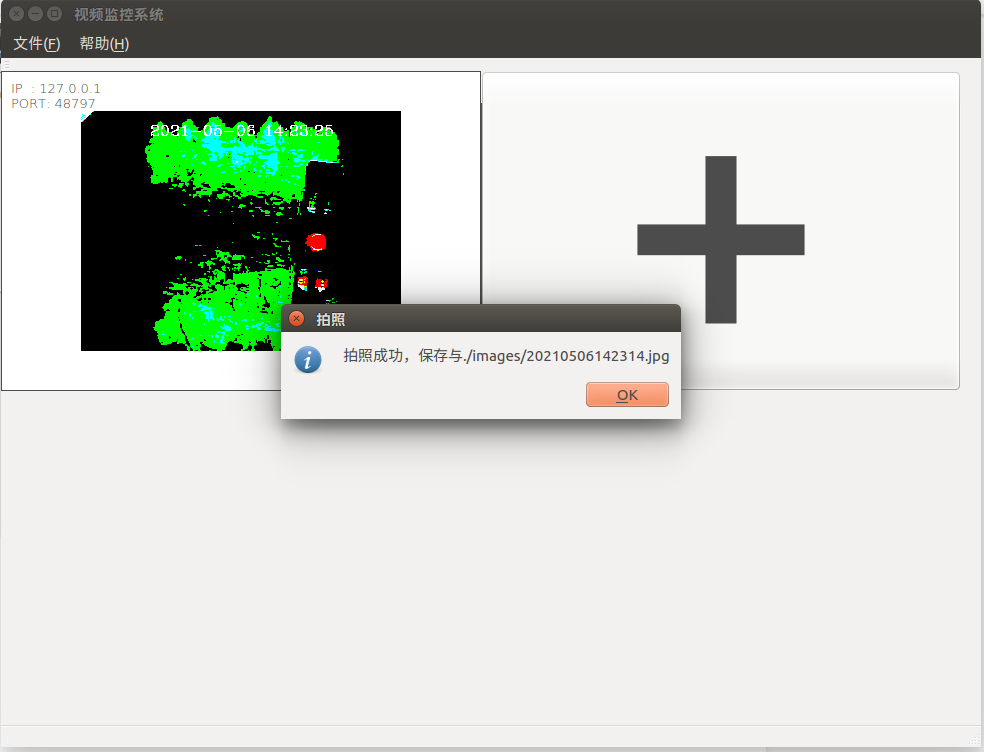
3、截图
4、保存视频
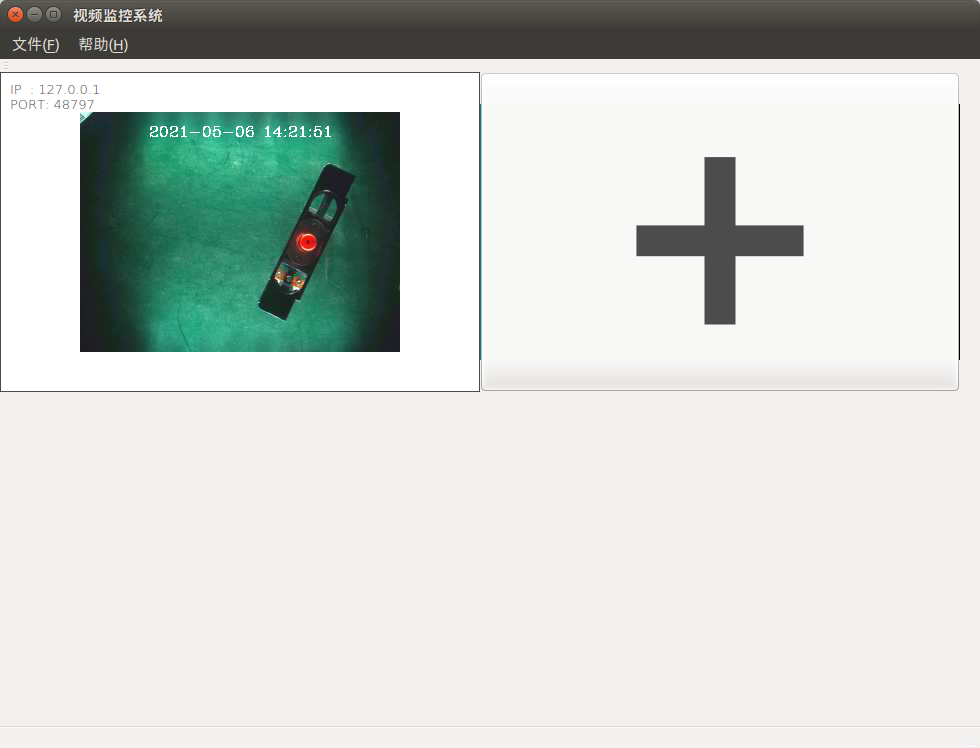
5、视频上显示时间
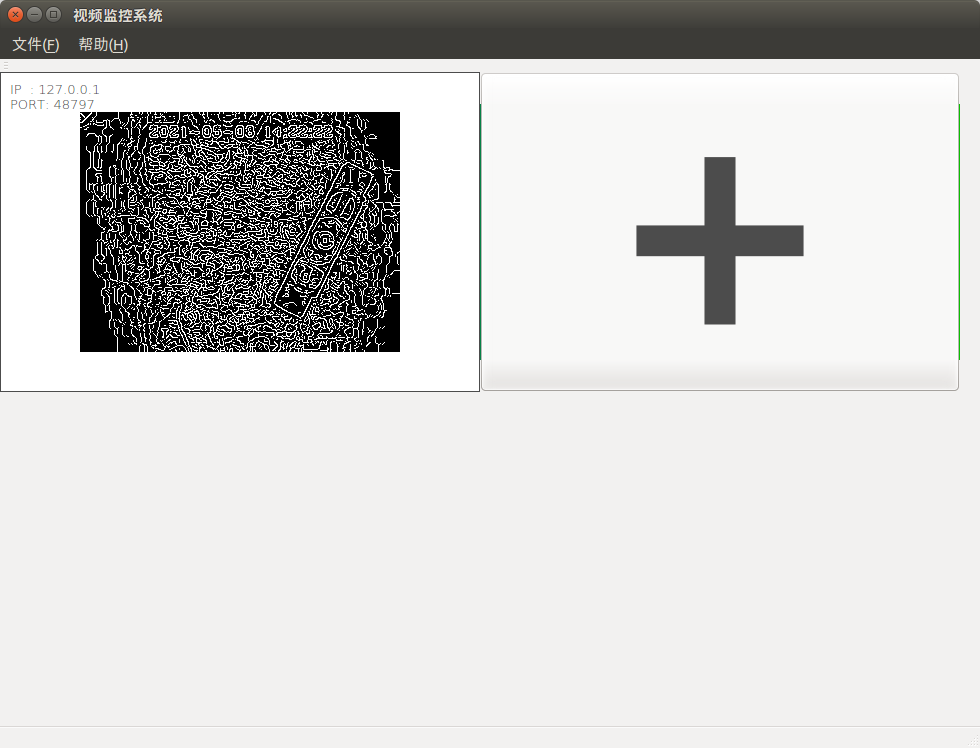
6、可以对视频进行边缘检测、锐化、阈值分割
7、同时监控两个及以上个摄像头
二、环境安装
本人开发环境ubuntu 16.04 qt5.6.3 opencv3.4
2.1 qt安装
Index of /new_archive/qt/5.6/5.6.3
下载linux版本


修改可执行权限,Terminal中运行
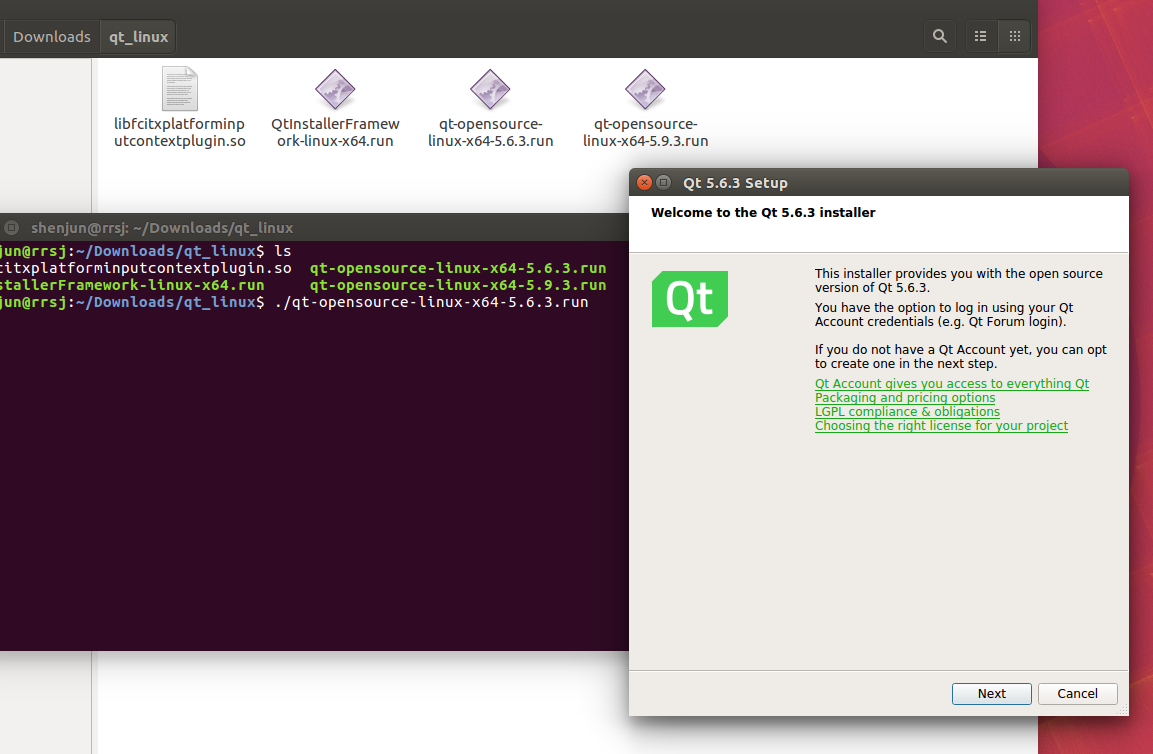
一路傻瓜式安装即可
2.2 opencv安装
安装cmake
sudo apt-get install cmake
安装依赖环境
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
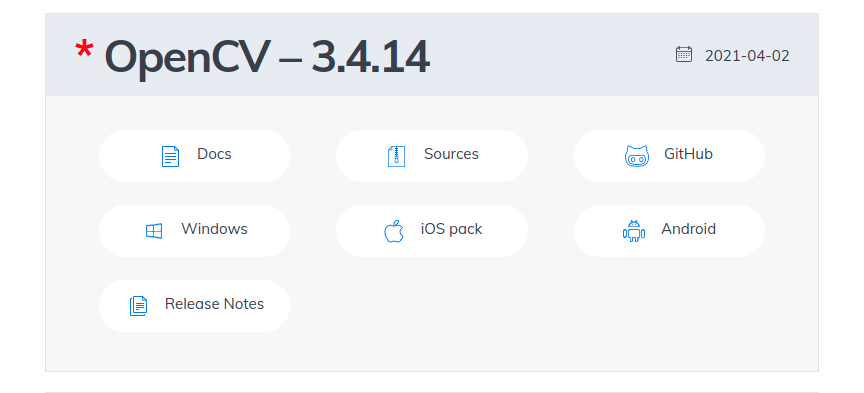
下载opencv3.4版本
下载地址:Releases – OpenCV,点击Sources进行下载自己需要的版
下载完后解压文件,进入,当前位置打开Terminal
mkdir build
cd build
sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
sudo make -j4
sudo make install
到此所有依赖环境安装完毕
三、系统设计
3.1、 整体流程设计

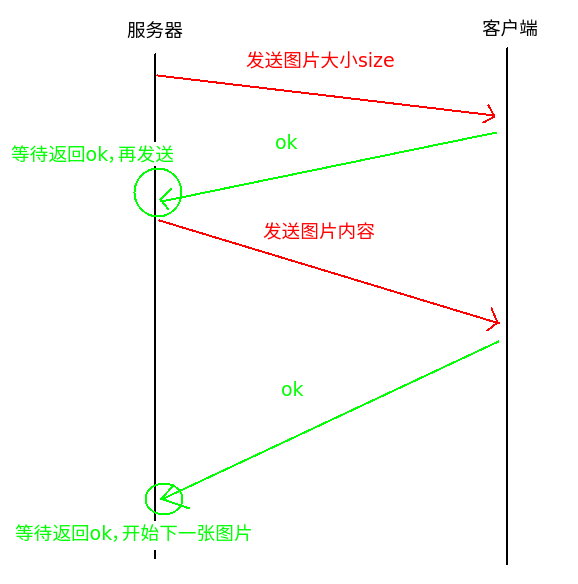
3.2 、数据传输交互流程
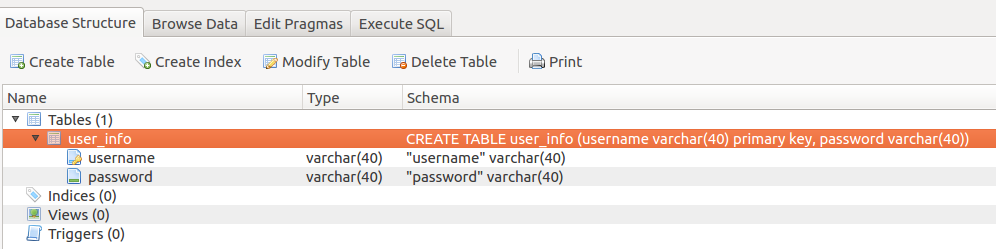
3.3 、数据库设计
一张用户表记录注册信息即可
四、关键代码
4.1、如何实现通信(TCP)
4.1.1 服务端
在头文件里面定义一个server指针变量,一个socket指针变量
QTcpServer *tcpserver;
QTcpSocket *tcpsocket;
实例化server,监听的对象设成Any,端口号设置一个固定值,客户端与服务端端口号一致才能通信成功
tcpserver = new QTcpServer(this);
tcpserver->listen(QHostAddress::Any, 48797);
监听到有新连接接入时,连接到信号槽来处理连接的客户端
connect(tcpserver, SIGNAL(newConnection()), this,
SLOT(slotTcpNewConnection()));
void MainWindow::slotTcpNewConnection() {
qDebug("NEW CONNECTION");
tcpsocket = tcpserver->nextPendingConnection(); //获取监听到的socket
/*获取对方IP和端口*/
QString ip = tcpsocket->peerAddress().toString();
quint16 port = tcpsocket->peerPort();
QString str = QString("[%1:%2]成功连接").arg(ip).arg(port);
ui->textBrowser->append(str); /*显示编辑区*/
//连接成功后我们再连接一个信号槽到准备接收信号槽函数中去
connect(tcpsocket, SIGNAL(readyRead()), this, SLOT(slotTcpReadyRead()));
//已连接套接字的断开信号与自身的稍后删除信号相连接
connect(tcpsocket, SIGNAL(disconnected()), this, SLOT(slotDisconnect()));
}
当收客户端发来的信息后,开启读取摄像头数据线程
void MainWindow::slotTcpReadyRead() {
QByteArray recvbuf = tcpsocket->readAll();
qDebug("recv:");
qDebug(recvbuf);
vapi.start();
}
V4l2Api为线程,启动线程后,会发送sendImage信号,关联slotSendImage
V4l2Api vapi;
connect(&vapi, &V4l2Api::sendImage, this, &MainWindow::slotSendImage);
void MainWindow::slotSendImage(QImage image) {
qDebug("send image:");
QImage tempimage = image;
tempimage =
tempimage.scaled(800, 480, Qt::KeepAspectRatio, Qt::FastTransformation)
.scaled(400, 240, Qt::KeepAspectRatio, Qt::SmoothTransformation);
QPixmap pixmap =
QPixmap::fromImage(tempimage); //把img转成位图,我们要转成jpg格式
QByteArray ba;
QBuffer buf(&ba); //把ba绑定到buf上,操作buf就等于操作ba
pixmap.save(&buf, "jpg", 50); //把pixmap保存成jpg,压缩质量50 数据保存到buf
//先写大小过去,告诉主机我们要传输的数据有多大
tcpsocket->write(QString("size=%1").arg(ba.size()).toLocal8Bit().data());
tcpsocket->waitForReadyRead(); //等待主机响应"ok"
tcpsocket->write(ba); //把图像数据写入传输给主机
tcpsocket->waitForReadyRead();
}
4.1.2 客户端
接收消息封装成线程,重写run
void RecvThread::run() {
isRunning = true;
QTcpSocket tcpsocket;
connect(&tcpsocket, SIGNAL(disconnected()), this, SIGNAL(disconnectSlot()));
tcpsocket.connectToHost(ip, port);
if (!tcpsocket.waitForConnected(3000)) {
qDebug() << "连接失败:" << tcpsocket.errorString();
emit disconnectSlot();
return;
} else {
qDebug() << "连接成功!";
}
//发送HTTP请求
tcpsocket.write("\r\n\r\n");
if (tcpsocket.waitForBytesWritten(3000)) {
qDebug() << "发送Http Request成功!";
} else {
qDebug() << "发送Http Request失败!";
return;
}
cv::VideoWriter videowriter; //录屏
int recvtimes=0; //接收次数
QByteArray jpgArr; //存储图片
int totalsize; //总大小
while (isRunning) {
if (tcpsocket.waitForReadyRead()) {
QByteArray buf = tcpsocket.readAll();
qDebug() << "recv buf: " << buf << "\n";
if (buf.contains("size=")) {
buf = buf.replace("size=", "");
totalsize = buf.toInt();
jpgArr.clear();
tcpsocket.write("ok"); //发送一个响应给客户机
tcpsocket.waitForBytesWritten(); //等待数据写入
} else {
//如果不是图片大小数据,就是图片数据,图片数据追加写到数组里面
jpgArr.append(buf);
}
if (jpgArr.length() == totalsize) {
QImage img_qt;
img_qt.loadFromData(jpgArr, "JPG");
cv::Mat src_img_cv; //源数据
src_img_cv = Util::QImage2cvMat(img_qt); //QImage转mat
...其他图像处理
img_qt = Util::cvMat2QImage(src_img_cv); //mat转QImage
emit transmitData(img_qt);
jpgArr.clear();
tcpsocket.write("ok");
}
}
}
4.2、如何实现视频读取(V4L2)
把v4l2封装在线程里,支持yuyv、jpeg格式转rgb算法
v4l2api.h
#ifndef V4L2API_H
#define V4L2API_H
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace std;
const int WIDTH = 640;
const int HEIGHT = 480;
//异常类
class VideoException : public exception {
public:
VideoException(string err) : errStr(err) {}
~VideoException() {}
const char *what() const noexcept { return errStr.c_str(); }
private:
string errStr;
};
struct VideoFrame {
char *start; //保存内核空间映射到用户空间的空间首地址
int length; //空间长度
};
// v4l2封装成线程
class V4l2Api : public QThread {
Q_OBJECT
public:
V4l2Api(const char *dname = "/dev/video0", int count = 4);
~V4l2Api();
/**
* @brief open 打开摄像头
*/
void open();
/**
* @brief close 关闭摄像头
*/
void close();
/**
* @brief grapImage
* @param imageBuffer
* @param length
*/
void grapImage(char *imageBuffer, int *length);
/**
* @brief yuyv_to_rgb888 yuyv转rgb算法
* @param yuyvdata
* @param rgbdata
* @param picw
* @param pich
* @return
*/
bool yuyv_to_rgb888(unsigned char *yuyvdata, unsigned char *rgbdata,
int picw = WIDTH, int pich = HEIGHT);
/**
* @brief jpeg_to_rgb888 jpeg转rgb算法
* @param jpegData
* @param size
* @param rgbdata
*/
void jpeg_to_rgb888(unsigned char *jpegData, int size,
unsigned char *rgbdata);
inline void setRunning(bool running);
/**
* @brief run定义run函数
*/
void run();
private:
/**
* @brief video_init
*/
void video_init();
/**
* @brief video_mmap
*/
void video_mmap();
private:
string deviceName; //摄像头名称
int vfd; //保存文件描述符
int count; //缓冲区个数
vector framebuffers;
volatile bool isRunning; //是否运行
signals:
/**
* @brief sendImage 发送图片
*/
void sendImage(QImage);
};
void V4l2Api::setRunning(bool running) { this->isRunning = running; }
#endif // V4
v4l2api.cpp
#include "v4l2api.h"
#include
#include
#include
V4l2Api::V4l2Api(const char *dname, int count)
: deviceName(dname), count(count) {
this->open();
}
V4l2Api::~V4l2Api() { this->close(); }
void V4l2Api::open() {
video_init();
video_mmap();
#if 1
//开始采集
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int ret = ioctl(this->vfd, VIDIOC_STREAMON, &type);
if (ret < 0) {
perror("start fail");
}
#endif
}
void V4l2Api::close() {
enum v4l2_buf_type type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
int ret = ioctl(this->vfd, VIDIOC_STREAMOFF, &type);
if (ret < 0) {
perror("stop fail");
}
//释放映射
for (int i = 0; i < this->framebuffers.size(); i++) {
munmap(framebuffers.at(i).start, framebuffers.at(i).length);
}
}
void V4l2Api::grapImage(char *imageBuffer, int *length) {
// select (rfds, wfds, efds, time)
struct v4l2_buffer readbuf;
readbuf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
readbuf.memory = V4L2_MEMORY_MMAP;
// perror("read");
if (ioctl(this->vfd, VIDIOC_DQBUF, &readbuf) < 0) //取一针数据
{
perror("read image fail");
}
printf("%ld\n", readbuf.length);
*length = readbuf.length;
memcpy(imageBuffer, framebuffers[readbuf.index].start,
framebuffers[readbuf.index].length);
//把用完的队列空间放回队列中重复使用
if (ioctl(vfd, VIDIOC_QBUF, &readbuf) < 0) {
perror("destroy fail");
exit(1);
}
}
void V4l2Api::video_init() {
// 1.打开设备
this->vfd = ::open(deviceName.c_str(), O_RDWR);
if (this->vfd < 0) {
perror("open fail");
VideoException vexp("open fail"); //创建异常对象
//抛异常
throw vexp;
}
// 2.配置采集属性
struct v4l2_format vfmt;
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //
vfmt.fmt.pix.width = WIDTH;
vfmt.fmt.pix.height = HEIGHT;
vfmt.fmt.pix.pixelformat =
V4L2_PIX_FMT_JPEG; //(设置视频输出格式,但是要摄像头支持4:2:2)
//通过ioctl把属性写入设备
int ret = ioctl(this->vfd, VIDIOC_S_FMT, &vfmt);
if (ret < 0) {
perror("set fail");
// VideoException vexp("set fail");//创建异常对象
// throw vexp;
}
//通过ioctl从设备获取属性
memset(&vfmt, 0, sizeof(vfmt));
vfmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ret = ioctl(this->vfd, VIDIOC_G_FMT, &vfmt);
if (ret < 0) {
perror("get fail");
// VideoException vexp("get fail");//创建异常对象
// throw vexp;
}
if (vfmt.fmt.pix.width == WIDTH && vfmt.fmt.pix.height == HEIGHT &&
vfmt.fmt.pix.pixelformat == V4L2_PIX_FMT_JPEG) {
} else {
// VideoException vexp("set error 2");//创建异常对象
// throw vexp;
}
}
void V4l2Api::video_mmap() {
// 1申请缓冲区队列
struct v4l2_requestbuffers reqbuffer;
reqbuffer.count = this->count; //申请缓冲区队列长度
reqbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
reqbuffer.memory = V4L2_MEMORY_MMAP;
int ret = ioctl(this->vfd, VIDIOC_REQBUFS, &reqbuffer);
if (ret < 0) {
perror("req buffer fail");
// VideoException vexp("req buffer fail");//创建异常对象
// throw vexp;
}
// 2.映射
for (int i = 0; i < this->count; i++) {
struct VideoFrame frame;
struct v4l2_buffer mapbuffer;
mapbuffer.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
mapbuffer.index = i;
mapbuffer.memory = V4L2_MEMORY_MMAP;
//从队列中拿到内核空间
ret = ioctl(this->vfd, VIDIOC_QUERYBUF, &mapbuffer);
if (ret < 0) {
perror("query fail");
}
//映射
frame.length = mapbuffer.length;
frame.start = (char *)mmap(NULL, mapbuffer.length, PROT_READ | PROT_WRITE,
MAP_SHARED, this->vfd, mapbuffer.m.offset);
//空间放回队列中(内核空间)
ret = ioctl(this->vfd, VIDIOC_QBUF, &mapbuffer);
//把frame添加到容器framebuffers
framebuffers.push_back(frame);
}
}
bool V4l2Api::yuyv_to_rgb888(unsigned char *yuyvdata, unsigned char *rgbdata,
int picw, int pich) {
int i, j;
unsigned char y1, y2, u, v;
int r1, g1, b1, r2, g2, b2;
//确保所转的数据或要保存的地址有效
if (yuyvdata == NULL || rgbdata == NULL) {
return false;
}
int tmpw = picw / 2;
for (i = 0; i < pich; i++) {
for (j = 0; j < tmpw; j++) // 640/2 == 320
{
// yuv422
// R = 1.164*(Y-16) + 1.159*(V-128);
// G = 1.164*(Y-16) - 0.380*(U-128)+ 0.813*(V-128);
// B = 1.164*(Y-16) + 2.018*(U-128));
//下面的四个像素为:[Y0 U0 V0] [Y1 U1 V1] -------------[Y2 U2 V2] [Y3 U3
// V3]
//存放的码流为: Y0 U0 Y1 V1------------------------Y2 U2 Y3 V3
//映射出像素点为: [Y0 U0 V1] [Y1 U0 V1]--------------[Y2 U2 V3] [Y3 U2
// V3]
//获取每个像素yuyv数据 YuYv
y1 = *(yuyvdata + (i * tmpw + j) * 4); // yuv像素的Y
u = *(yuyvdata + (i * tmpw + j) * 4 + 1); // yuv像素的U
y2 = *(yuyvdata + (i * tmpw + j) * 4 + 2);
v = *(yuyvdata + (i * tmpw + j) * 4 + 3);
//把yuyv数据转换为rgb数据
r1 = y1 + 1.042 * (v - 128);
g1 = y1 - 0.34414 * (u - 128);
b1 = y1 + 1.772 * (u - 128);
r2 = y2 + 1.042 * (v - 128);
g2 = y2 - 0.34414 * (u - 128);
b2 = y2 + 1.772 * (u - 128);
if (r1 > 255)
r1 = 255;
else if (r1 < 0)
r1 = 0;
if (g1 > 255)
g1 = 255;
else if (g1 < 0)
g1 = 0;
if (b1 > 255)
b1 = 255;
else if (b1 < 0)
b1 = 0;
if (r2 > 255)
r2 = 255;
else if (r2 < 0)
r2 = 0;
if (g2 > 255)
g2 = 255;
else if (g2 < 0)
g2 = 0;
if (b2 > 255)
b2 = 255;
else if (b2 < 0)
b2 = 0;
//把rgb值保存于rgb空间 数据为反向
rgbdata[((pich - 1 - i) * tmpw + j) * 6] = (unsigned char)b1;
rgbdata[((pich - 1 - i) * tmpw + j) * 6 + 1] = (unsigned char)g1;
rgbdata[((pich - 1 - i) * tmpw + j) * 6 + 2] = (unsigned char)r1;
rgbdata[((pich - 1 - i) * tmpw + j) * 6 + 3] = (unsigned char)b2;
rgbdata[((pich - 1 - i) * tmpw + j) * 6 + 4] = (unsigned char)g2;
rgbdata[((pich - 1 - i) * tmpw + j) * 6 + 5] = (unsigned char)r2;
}
}
return true;
}
void V4l2Api::jpeg_to_rgb888(unsigned char *jpegData, int size,
unsigned char *rgbdata) {
//解码jpeg图片
// 1.定义解码对象struct jpeg_decompress_struct 错误处理对象struct
// jpeg_error_mgr;
struct jpeg_decompress_struct cinfo;
struct jpeg_error_mgr err;
// 2.初始化错误jpeg_std_error(err),创建初始化解码对象jpeg_create_decompress();
cinfo.err = jpeg_std_error(&err);
jpeg_create_decompress(&cinfo);
// 3.加载源数据jpeg_mem_src()
jpeg_mem_src(&cinfo, jpegData, size);
// 4.获取jpeg图片头数据
jpeg_read_header(&cinfo, true);
// 5.开始解码
jpeg_start_decompress(&cinfo);
// 6.分配存储一行像素所需要的空间//---RGB数据
// 640--cinfo.output_width, 480--cinfo.output_height
char *rowFrame = (char *)malloc(cinfo.output_width * 3);
int pos = 0;
// 7.一行一行循环读取(一次读取一行,要全部读完)
while (cinfo.output_scanline < cinfo.output_height) {
//读取一行数据--解码一行
jpeg_read_scanlines(&cinfo, (JSAMPARRAY)&rowFrame, 1);
//把rgb像素显示在lcd上 mmp
memcpy(rgbdata + pos, rowFrame, cinfo.output_width * 3);
pos += cinfo.output_width * 3;
}
free(rowFrame);
// 8.解码完成
jpeg_finish_decompress(&cinfo);
// 9.销毁解码对象
jpeg_destroy_decompress(&cinfo);
}
void V4l2Api::run() {
isRunning = true;
char buffer[WIDTH*HEIGHT*3];
char rgbbuffer[WIDTH*HEIGHT*3];
int times = 0;
int len;
while(isRunning)
{
grapImage(buffer, &len);
//yuyv_to_rgb888((unsigned char *)buffer, (unsigned char *)rgbbuffer);
jpeg_to_rgb888((unsigned char *)buffer, len, (unsigned char *)rgbbuffer);
//把RGB数据转为QImage
QImage image((uchar*)rgbbuffer, WIDTH, HEIGHT, QImage::Format_RGB888);
emit sendImage(image);
qDebug()<
4.3、如何实现图像处理(opencv)
pro文件中加入
INCLUDEPATH += /usr/local/include \
/usr/local/include/opencv \
/usr/local/include/opencv2 \
LIBS += /usr/local/lib/libopencv_*.so \
引入头文件
#include
#include
using namespace cv;
边缘检测
if(isEdgeDetect){ //边缘检测
cv::Mat dstPic, edge, grayImage;
//创建与src同类型和同大小的矩阵
dstPic.create(src_img_cv.size(), src_img_cv.type());
//将原始图转化为灰度图
cvtColor(src_img_cv, grayImage, COLOR_BGR2GRAY);
//先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//运行canny算子
Canny(edge, edge, 3, 9, 3);
src_img_cv = edge;
}
锐化
if(isSharpen){ //锐化
cv::Mat blur_img, usm;
GaussianBlur(src_img_cv, blur_img, Size(0, 0), 25);//高斯滤波
addWeighted(src_img_cv, 1.5, blur_img, -0.5, 0, usm);
src_img_cv = usm;
}
阈值分割
if(isThreshold){ //阈值分割
double the = 150;//阈值
cv::Mat threshold_dst;
threshold(src_img_cv, threshold_dst, the, 255, THRESH_BINARY);//手动设置阈值
src_img_cv = threshold_dst;
}
4.4 登录验证
使用sqlite数据库,封装成单例模式
sqlitesingleton.h
#ifndef SQLITESINGLETON_H
#define SQLITESINGLETON_H
#include
#include
#include
#include
#include
#include
class SQLiteSingleton {
public:
static SQLiteSingleton &getInstance();
/**
* @brief initDB 初始化数据库
* @param db_type
*/
void initDB(QString db_type = "QSQLITE");
/**
* @brief createTable 创建数据库表
*/
void createTable();
/**
* @brief insertUserTable 添加用户
* @param username 用户名
* @param pwd 密码
*/
bool insertUserTable(QString username, QString pwd);
/**
* @brief queryUserExist 查询用户是否存在
* @param username
* @param pwd
* @return
*/
bool queryUserExist(QString username, QString pwd);
private:
SQLiteSingleton();
~SQLiteSingleton();
QSqlDatabase db;
};
#endif // SQLITESINGLETO
sqlitesingleton.cpp
#include "sqlitesingleton.h"
#include
#include
#include
SQLiteSingleton &SQLiteSingleton::getInstance() {
static SQLiteSingleton tSQLiteSingleton;
return tSQLiteSingleton;
}
void SQLiteSingleton::initDB(QString db_type) {
qDebug() << "初始化数据库";
if (db_type == "QSQLITE") {
db = QSqlDatabase::addDatabase("QSQLITE");
db.setDatabaseName("UserInfo.dat");
if (!db.open()) {
QSqlError lastError = db.lastError();
QMessageBox::warning(0, QObject::tr("Database Error"),
"数据库打开失败," + lastError.driverText());
return;
}
}
}
void SQLiteSingleton::createTable() {
QSqlQuery query(db);
bool ret = query.exec("create table user_info (username varchar(40) primary "
"key, password varchar(40))");
qDebug() << "create user_info " << ret;
}
bool SQLiteSingleton::insertUserTable(QString username, QString pwd) {
QSqlQuery query(db);
bool ret = query.exec(
QObject::tr("insert into user_info values('%1', '%2')").arg(username).arg(pwd));
qDebug() << "insertUserTable" << ret;
return ret;
}
bool SQLiteSingleton::queryUserExist(QString username, QString pwd) {
bool isExist = false;
QSqlQuery query(db);
bool ret = query.exec(
QObject::tr("select * from user_info where username='%1' and password='%2'")
.arg(username)
.arg(pwd));
qDebug() << "queryUserExist" << ret;
while (query.next()) {
isExist = true;
}
return isExist;
}
SQLiteSingleton::SQLiteSingleton() {}
SQLiteSingleton::~SQLiteSingleto
使用方法
初始化
SQLiteSingleton::getInstance().initDB();
SQLiteSingleton::getInstance().createTable();
注册
SQLiteSingleton::getInstance().insertUserTable(username, pwd1);
查询
isLoginSuccess = SQLiteSingleton::getInstance().queryUserExist(username, pwd);
五、实现效果
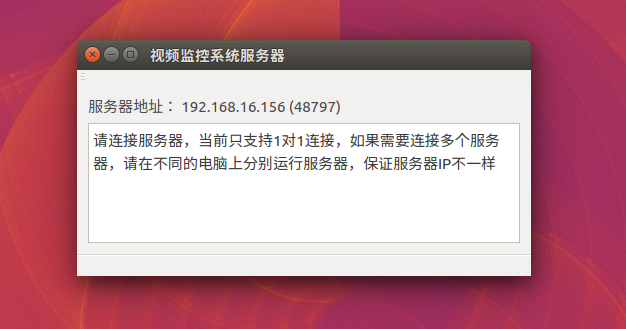
5.1、服务端GUI
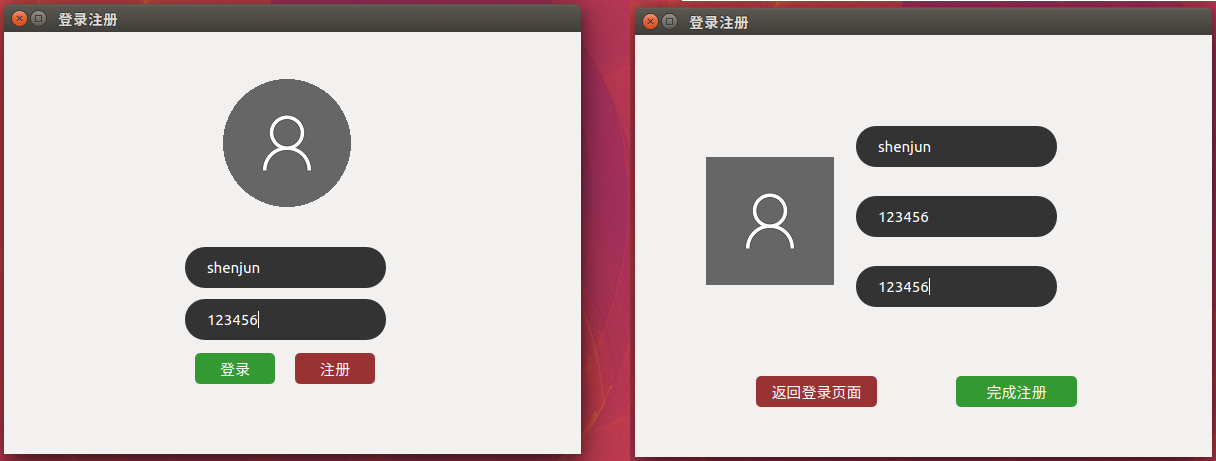
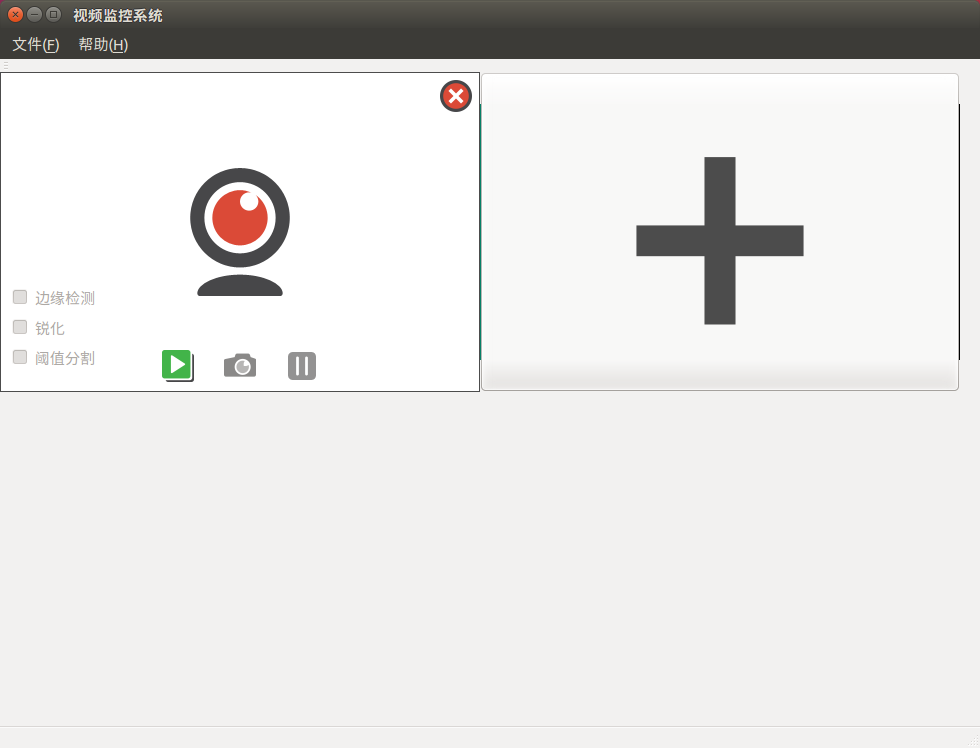
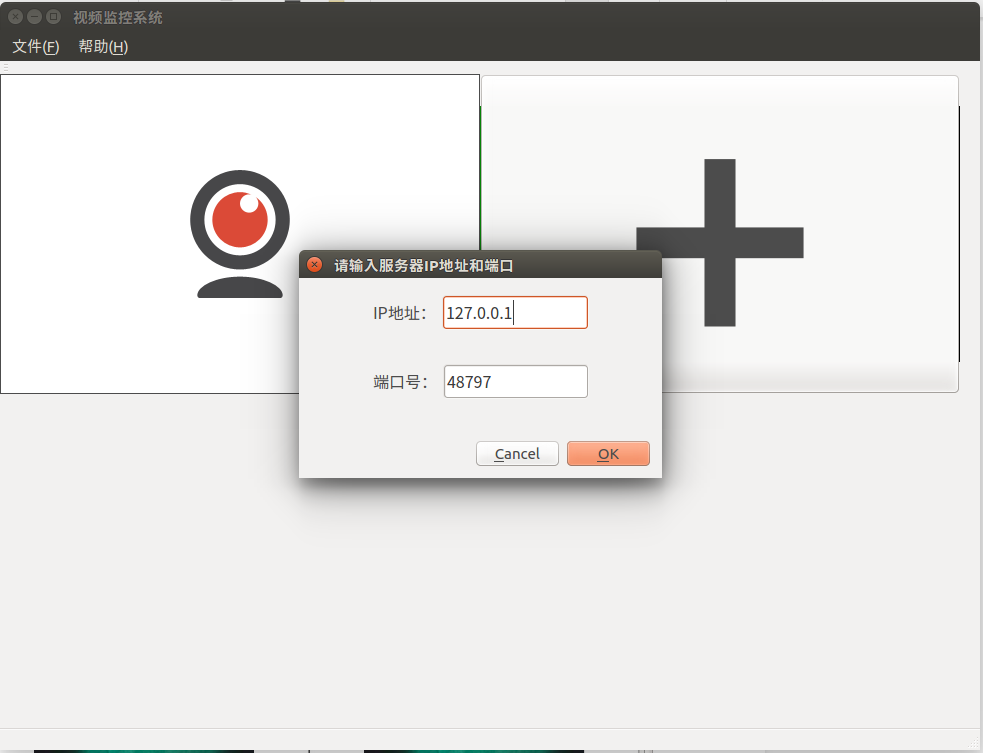
5.2、客户端GUI
六、参考文献
- Opencv安装教程解决opencv测试时OpenCV Error: Unspecified error (The function is not implemented.的问题_陶陶name-CSDN博客
- 基于QT的网络视频监控系统https://github.com/muxiaozi/LiveCamera
- V4L2示例https://github.com/justdoit-mqr/V4L2VideoProcess
- QT使用TCP传输图像或者数据的方法QT使用TCP传输图像或者数据的方法_ALong_Lj的博客-CSDN博客_qt tcp传输图片
- Opencv-锐化增强算法(USM) Opencv-锐化增强算法(USM)_lovefive55的博客-CSDN博客_opencv usm锐化
- OpenCV —— 阈值分割(直方图技术法,熵算法,Otsu,自适应阈值算法)OpenCV —— 阈值分割(直方图技术法,熵算法,Otsu,自适应阈值算法)_学无止境-CSDN博客_otsu阈值分割算法
Original: https://blog.csdn.net/qq_40602000/article/details/116453842
Author: Jason~shen
Title: Linux下基于qt的视频监控系统
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/816300/
转载文章受原作者版权保护。转载请注明原作者出处!