

说明
本篇博文旨在探讨(给出)车载毫米波雷达的行业标准以及产品测试方法。参考资料以最新的行业标准为基准,并结合本人的一些理解做说明,现阶段博主并没有测试的经验(拿Ti的板子采数据和分析应该不算测试经验…),但会随着工作的深入以及经验的累积补充更多的内容。
本篇博文会基于对这方面知识理解的加深以及读者的反馈长期更新内容和所附资料,有不当之处或有其它有益的参考资料可以在评论区给出,我们一起维护,我会定期完善。
Blog:
20220929文章第一次写作
文章架构
目录
一、关于行业标准的概述
任何一个行业(特别是工业界)健康、有序、高质量以及高速的发展离不开行业标准的制定,更何况车载毫米波雷达是作为辅助驾驶乃至以后的无人驾驶用的,关乎到人们的生命财产安全。类似法律是道德的底线,产品的行业标准是产品质量的底线,此外从某种程度上来说,标准也是行业的门槛所在,是由行业的先入局者制定的游戏规则,所以引领标准(国内/国际)的制定是各个有志于在行业大展身手的厂家所追求的。
本博文的讨论限于国内,本篇博文主要基于全国汽车标准化技术委员会全国汽车标准化技术委员会_百度百科 (baidu.com)于2022年9月26日发布的关于对汽车行业标准《车载毫米波雷达性能要求及试验方法》征求意见的函汽车标准制修订管理系统 (catarc.org.cn)为主要参考写作,该标准(虽然是征求意见阶段,但是后期的改动应该不大)是国内关于车载毫米波雷达性能以及试验方法最新的参考标准, 本博文会对该标准逐条进行一些细节性的必要解释。 除此之外,关于雷达需要实现的具体功能要求也有一些标准需要遵循,我会在博文后面一并附上资料,但本篇博文限定雷达产品的性能和测试,暂不讨论其需要实现的ADAS功能,后面可以做一期相关的博文。
车载毫米波雷达自然属于汽车行业,我国汽车行业的主管部门是工信部,但工信部并不参与标准的制定,一般是委托全国汽车标准化技术委员会来拟定相关的标准,更具体地,该委员会会拉来行业内的几家公司以及相关的科研机构一起制作相关的细节。
需要明白的是,标准主要限定的是宏观上的性能要求以及测试的标准化的方法, 标准没有也不应该限定具体的技术实现手段,否则产品会极端同质化,不存在差异化传感性能的可能性,反而不利于行业发展。
二、产品细化要求
产品要求包括:射频一致性、目标检测性能、整车测试、车规环境评价要求以及耐久性评价要求。
2.1 射频一致性要求:
A. 频率调频线性度:调频连续波雷达,在有效带宽内的频率调频线性度应不大于0.5%。
解释:对于调频连续波雷达,其单chirp频率随时间的变化理想的关系式为:



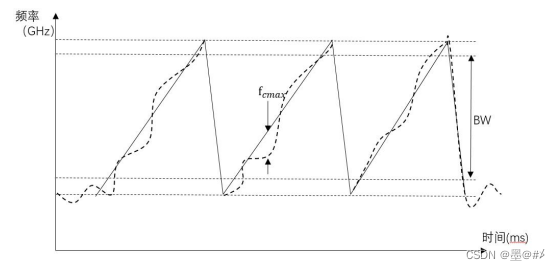
频率线性度示意图
频率线性度变差会直接影响雷达的距离和速度的分辨能力,改善频率线性度主要是通过更改PLL的一些参数(环路带宽等),具体的方法是硬件/芯片设计工程师的活了,暂不在本博文讨论范围之内。
B 、功率平坦度:调频连续波雷达,在任意1GHz有效工作带宽内,功率平坦度ΔP应不大于3.0dB。多发射通道输出的雷达,其每个发射通道的功率平坦度ΔP应不大于3.0dB;同一发射通道包含多个工作带宽模式的雷达,其最大工作带宽的功率平坦度ΔP应不大于 3.0dB。
解释:调频信号经过功放 PA后馈到天线上,PA对不同频率的增益并不一样,特别是当调频信号的带宽超过了PA的工作带宽时, 功率平坦度是指在输出的带宽内:不同频点上输出功率的最大值和最小值之差。如下图所示:
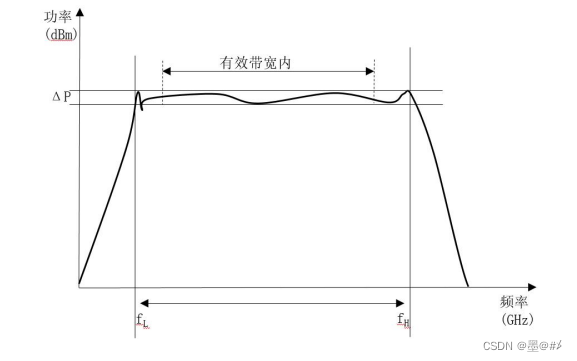
功率平坦度示意图
这里的规定主要是对PA提要求。功放的相关不在本博文的讨论范围之内。
C 、调制波形参数:测试并记录调频连续波的工作带宽BW、调频时间tchrip、调频连续波重复时间tmp1。对于多种调频连续波,应分别测试记录各调频连续波的重复时间,比如tmp1 和tmp2等。 没明白这里具体的要求是啥…
2.2 雷达目标检测性能
A 、单目标检测:
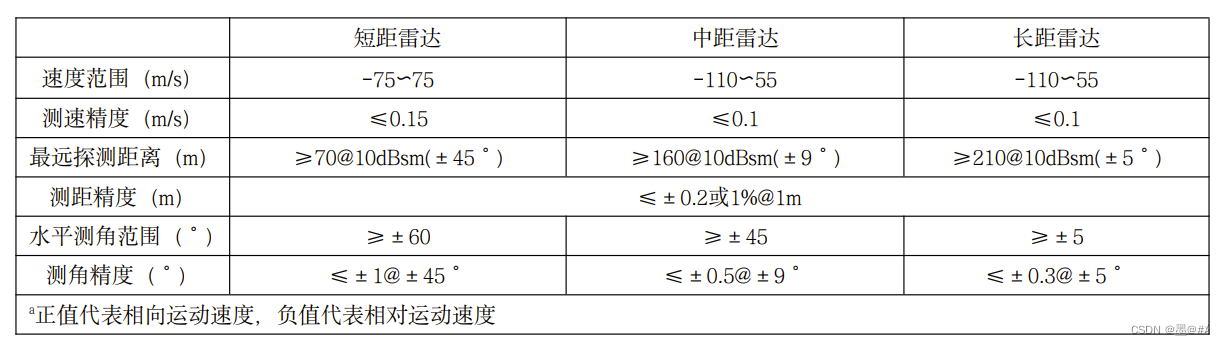
对于雷达系统设计师需要注意的是:标准中对最远探测距离对应的目标RCS和角度有明显的要求, 在论证系统参数时,需要采用特定角度下的天线增益来求解对应的探测距离!
B 、多目标检测:
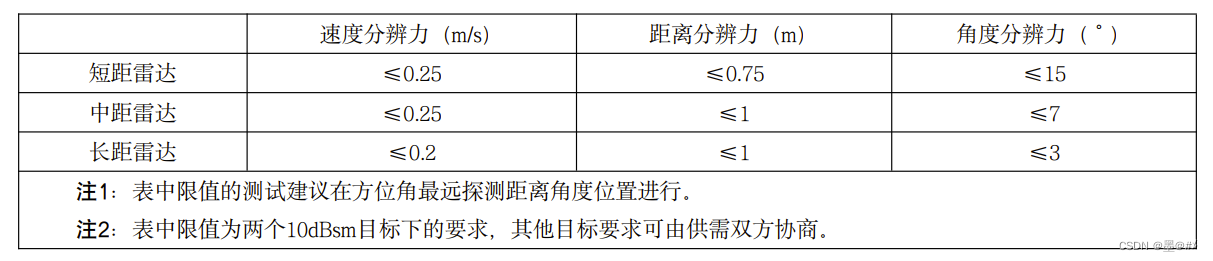
多目标下才有分辨力这一概念,这里的角度分辨力是方位向角度分辨率。关于前面的单目标和这里的多目标检测,这几个是雷达的核心性能参数,包括带宽、采样率、chirp周期、PRF等都是在这些参数的要求下设定的。
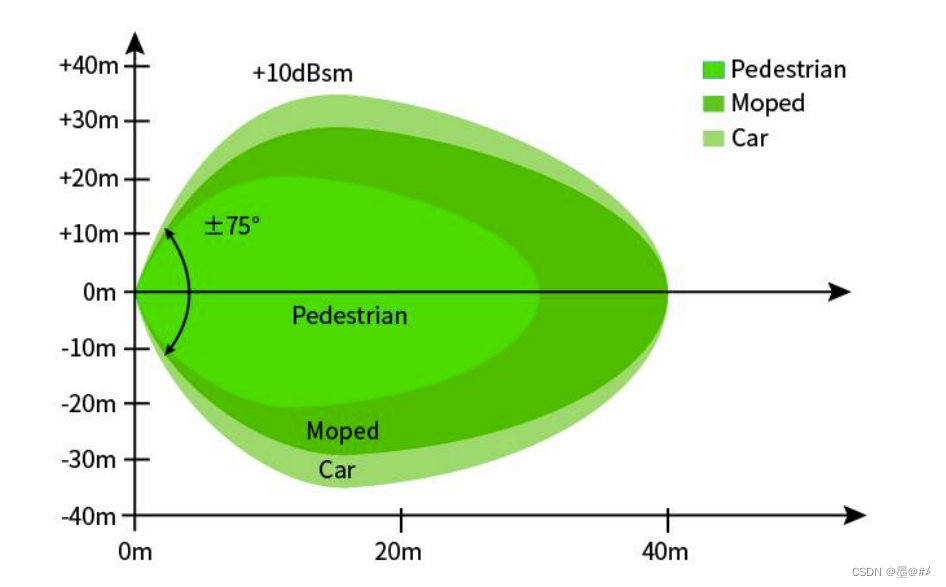
C 、方位角雷达威力图:实测的方位角雷达威力图应记录再测试报告中,探测威力要求可由供需双方协商确定。
D 、俯仰角雷达威力图:实测的俯仰角雷达威力图应记录在测试报告中,探测威力要 求可由供需双方协商确定。
解释:前述两个表格限定了基本的要求,这里的两要求没有明确的规定,给了产品差异性的可能,把决定权给到了OEM手上。 雷达威力图是指雷达在空域范围内方位向/俯仰向的作用距离(基于雷达方程从能量的角度考虑,非数据处理的角度),一般加入RCS,与天线的增益有密切关系,大概长 下图这样:
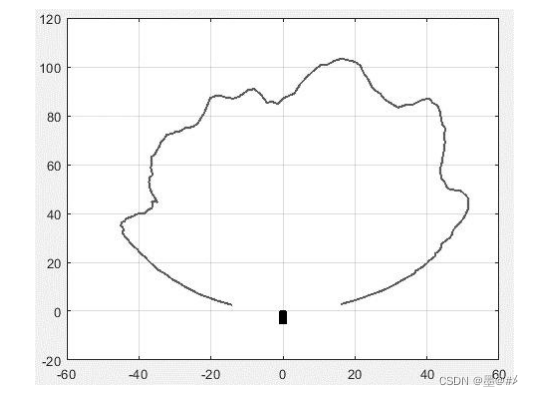
典型的雷达威力图(来源:纳雷SR75产品手册)
或者这种的:
雷达威力图示意图
E 、雷达抗干扰能力:探测到符合要求(目标的距离、速度、角度精度应在雷达标称 精度范围内)的目标概率应大于 90%,且无虚警情况。
解释:这里是对CFAR阈值的设置以及各影响SNR的硬件条件提出的挑战。
F 、最小作用距离:雷达的最小作用距离应不大于 0.6 米。
2.3 整车测试
雷达是要装载到车上使用的,那么安装环境以及行车环境必然对性能有所影响,此外雷达需要满足特定的功能。
A 、外部遮挡物要求:在雷达水平视角内外部遮挡物双程衰减值不大于5dB的条件下, 雷达方位角视角范围内的最大探测距离和角度应满足系统功能设计要求。
解释:雷达装于车上时,包括雷达外壳和车体外壳都会对电磁波有衰减, 这是在做系统设计时需要考虑的。
B 、功能要求:雷达的功能应用应满足 GB/T 39265-2020《道路车辆盲区监视系统 (BSD)性能要求及试验方法》、GB/T 39323-2020《乘用车车道保持辅助系统(LKA)性能 要求及试验方法》、GB/T《乘用车后部交通穿行提示系统性能要求及试验方法》、GB/T《乘 用车车门开启预警系统性能要求及试验方法》、GB/T《乘用车自动紧急制动系统(AEBS) 性能要求及试验方法》和 GB/T《商用车辆车道保持辅助系统性能要求及试验方法》
解释: 相关的ADAS功能的实现以及测试方法我后面会出一期博文。这里更多的可能需要与OEM协同解决了,将ADAS功能的实现放在雷达里?还是雷达只负责输出点云数据给到车,由车的域控来实现ADAS的具体功能?
C 、道路测试要求:雷达应能满足对目标物速度、角度和距离的识别,虚警率和漏警率应满足系统功能设计的要求
2.4 车规环境评价要求
实际应用过程中,雷达还需要应对各类电气/电磁/机械等环境,这些环境条件都归于本小节的车规环境评价中,这里的要求主要是基于各类国标来拟定标准进行测试: GB/T 28046.2-2019、GB/T 1865-2009、GB/T 28046.5-2013等
A 、电气性能:包含直流供电电压、过电压、叠加交流电、供电电压缓降或缓升、供 电电压缓降和快升、供电电压瞬态变化、反向电压、短时中断供电、开路、短路保护、绝缘 电阻、参考接地和供电偏移等极端电压条件下的要求。
B 、电磁兼容:包含对静电放电产生的电骚扰抗扰、对由传导和耦合引起的电骚扰抗 扰、对电磁辐射的抗扰、无线电骚扰特性。
C 、机械性能:包含机械振动、机械冲击、自由跌落、碎石冲击、线束拉脱力。
D 、防尘防水性能: IP6K7。
E 、环境耐候性:系统的贮存环境条件和工作环境条件应满足下表:

对系统进行环境试验的内容包括:低温贮存、低温工作、高温贮存、高温工作、温度梯度、 温度循环、湿热试验、冰水冲击、盐雾腐蚀和太阳光辐射
解释:应用于车上的电子产品,不同的部位要求不一样,比如在发动机周边需要能耐受150℃的高温,对车载雷达的要求到85℃即可。
F 、化学腐蚀:系统应按照不同的安装位置,选择试剂和暴露条件进行化学腐蚀试验, 试验后表面不应有起泡、龟裂、脱落、锈蚀和机械损伤,镜头表面不应有气泡、划痕、裂纹缺陷。
2.5 耐久性评价要求
本标准提出了高温耐久性和温度交变耐久性评价的要求和测试方法,包括高温耐久性和温度交变耐久性,但是耐久性试验是否开展由供需双方协商决定,本标准为耐久性试验提供可供参考的要求及评价、计算模型,并作为资料性附录。
解释:车规产品的要求一般需要到15年或20Wkm。
三、测试方法
前面一章给出了各类参数要求,这章给出对前述参数要求的测试方法与要求,即:如何通过试验验证雷达符合这些要求,这些试验应该如何设计。
3.1 试验条件 :
包括温度、供电、测试夹具、天线、线缆、暗室、距离、转台等条件(这里的实验条件是对雷达性能做测试时的试验条件,此外还有对雷达处于各类环境下的测试, 后者则是对雷达环境耐受能力的考查):


关于夹具和线缆等更具体的参考随附资料中的6.1节。远场条件:

3.2 具体的试验:
该部分的内容太多了,通读后觉得标准中的步骤和说明已经足够清楚,并没有太多重复和解释的必要,读者可以阅读所附资料。
补充几个需要注意的:
A 、射频一致性试验
对包括频率调频线性度、功率平坦度、调制波形参数都需要用到 频谱仪。这里的试验 没有远场条件的限制。频谱仪的工作原理频谱仪原理 – 知乎 (zhihu.com),博主没有用过,暂时不发表更多的说明,这里的试验不是很难,如果是针对不带天线的测试板,从芯片引出的微带线接到测试板的边缘,然后连到同轴线上给到仪器。或者:
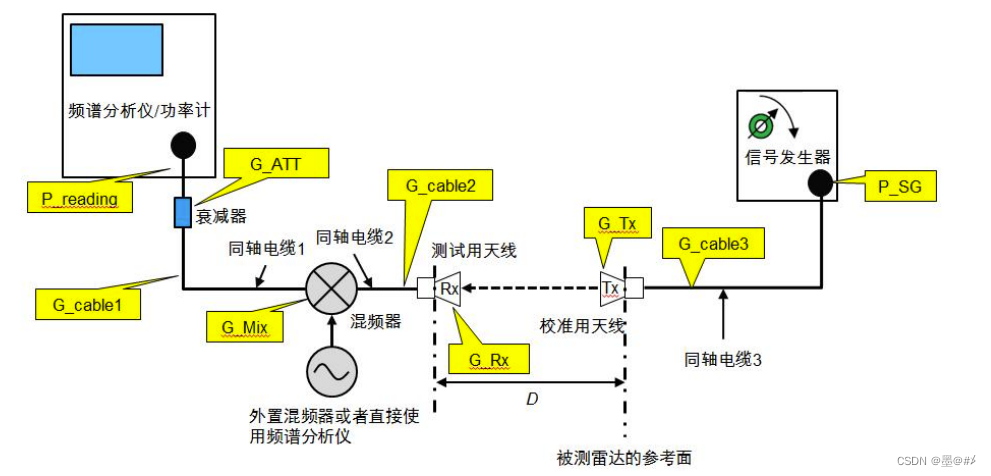
将这里的Tx对应成雷达就是前述试验的试验场景
B 、雷达对目标探测性能的试验主要是基于 雷达模拟器来实现的。对雷达威力图、抗干扰能力以及最小测量距离的测量, 其极限值的评价标准不是雷达是否能检测到目标,而是测量的精度是否符合要求,其临界点(或极限值)是雷达对该目标的检测精度不再符合要求。
C 、车规环境测试是说处在设置的环境下需要雷达同时满足性能的要求,也即在对应的环境下来测试雷达性能。相关试验标准参考本标准6.5节中的各类国标。
四、总结
本篇博文探讨(给出)了车载毫米波雷达性能及测试的行业标准,以2022年9月26日出版的《车载毫米波雷达性能要求及试验方法》(征求意见稿)为基准,结合本人的理解做了一些解释性说明。雷达的测试以及车规认证是一项系统性工程,需要包括雷达厂家、OEM、以及专门的测试认证机构共同维护和推动其发展。
标准的制定可以规范产业行为,有效地提升毫米波雷达技术水平,为汽车相关安全改善汽车安全性能,为汽车智能网联提供车外感知系统传感器技术参考,同时,标准的实施将大大推动基于毫米波雷达技术在汽车电子技术上的发展。
五、参考资料
汽车标准制修订管理系统 (catarc.org.cn) 征求意见稿以及征求意见稿编制说明
国家标准全文公开 (samr.gov.cn) 此外可以从该网站查看ADAS功能相关的国家标准
Original: https://blog.csdn.net/xhblair/article/details/127108174
Author: 墨@#≯
Title: 车载毫米波雷达的性能标准与测试方法
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/813950/
转载文章受原作者版权保护。转载请注明原作者出处!