

- MPC 跟踪圆形轨迹/直线轨迹
- MPC 跟踪双移线轨迹
- MPC 进行局部路径规划+轨迹跟踪
- MPC跟踪直线轨迹
- N MPC 对直线轨迹进行跟踪
- MPC 算法跟踪五次多项式曲线
以上为目录
推荐学习的软件:matlab (2019a)+carsim(2016)
无人驾驶知识架构:
第一层:全局路径规划 二 环境感知 三 行为和轨迹规划 四 轨迹追踪
全局路径规划 模块:规划出一条从当前位置到目标点之间成本最低的可行路线
算法:蚁群算法,遗传算法 a star算法
环境感知模块:毫米波 激光雷达 相机 GPS等
检测到周围的环境信息,路面 静态物体 动态物体
行为决策和轨迹规划模块:确定车辆的具体行为动作及可行的参考轨迹
轨迹跟踪模块:也就是执行模块,保证车辆在
车辆领域基本知识和定义(定义)
坐标系的知识:(右手定则来判断Z轴的正向)
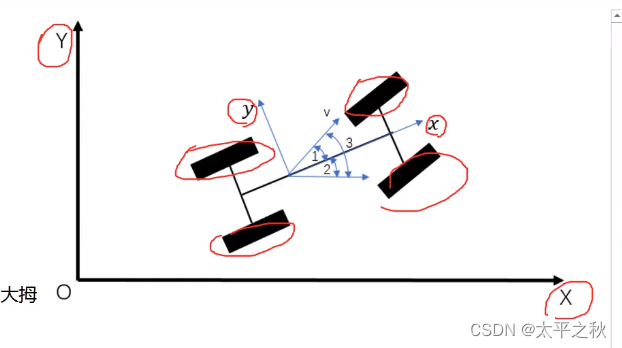

三个角度的具体定义:
质心侧偏角:车辆质心速度方向与车辆纵轴方向的夹角 β
横摆角:车辆纵轴方向与大地坐标系X轴正向之间的夹角
航向角:车辆质心速度与大地坐标系x轴正向之间的夹角
课程内容:以MPC算法的理论基础为依据(状态空间方程,输出方程),借助线性误差模型帮助大家理解MPC算法
问题1:我们的运动学方程可不可以直接写成线性的状态空间方程?

问题2:怎么样把非线性的系统写成线性的状态空间方程?
Original: https://blog.csdn.net/m0_63902994/article/details/124870790
Author: 太平之秋
Title: 1、MPC 算法(模型预测控制算法(MPC算法)轨迹跟踪控制)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/722638/
转载文章受原作者版权保护。转载请注明原作者出处!