

课题涉及到感知融合,首先需要将点云投影到图像上,本文利用ROS实现投影。分为两个ROS节点,一个节点负责不断读取点云原始bin文件,并以 sensor_msgs::PointCloud2 的消息格式发布话题;另一个节点对接收到的点云消息进行处理,把点云投影到相机图像上。
目录
- 笔者环境
- 一、创建ROS工作空间
* - 1. 创建工作空间目录
- 2. 编译工作空间
- 3. 设置环境变量
- 二、创建投影功能包
* - 1. 统一格式
- 2. 创建点云投影功能包
- 3. 编写节点cpp文件
- 三、创建launch功能包
* - 1. 创建launch包
- 2. 创建 run.launch 文件
- 3. 编写 run.launch 文件
- 四、在project功能包添加其他依赖
* - 1. 修改project目录下的CMakeLists.txt
- 2. 修改project目录下的package.xml
- 五、编译project功能包
- 六、投影效果展示
笔者环境
Ubuntu18.04+ ROS Melodic + Opencv 3.2.0 + Eigen 3.3.7 + PCL 1.8.0
测试数据集是Kitti的raw_data的2011_09_26(如果使用其他天的数据,需要在lidtocamp.cpp中修改标定数据)
一、创建ROS工作空间
1. 创建工作空间目录
这步比较基础,目的是在src文件中创建了一个 CMakeLists.txt 的文件,告诉系统这个是ROS的工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
2. 编译工作空间
在catkin_ws文件夹下进行编译:
cd ~/catkin_ws/
catkin_make
编译完成后,catkin_ws中新增build 和 devel
3. 设置环境变量
安装ROS的时候是将整个ros系统的环境变量设置到bash脚本中,现在我们需要把我们工作空间的环境变量设置到bash中。
gedit ~/.bashrc
source ~/catkin_ws/devel/setup.bash
source ~/.bashrc
如果想查看ros的环境变量: echo $ROS_PACKAGE_PATH
终端输出: /home/wdd/catkin_ws/src : /opt/ros/kinetic/share
第一个为我们刚创建工作空间的,第二个是ROS系统的
二、创建投影功能包
1. 统一格式
在src目录下创建
catkin_create_pkg package_name depend1 depend2 depend2
package_name:功能包名称
depend:依赖项
2. 创建点云投影功能包
在src目录下使用 catkin_create_pkg 创建一个 package 包并添加 roscpp 和 std_msgs 依赖项
catkin_create_pkg Lid_project_cam roscpp std_msgs
std_msgs:包含常见消息类型
roscpp:使用C++实现ROS各种功能
(如果使用python实现ROS各种功能,添加rospy)
3. 编写节点cpp文件
在功能包目录的src文件夹下创建节点文件:
cd Lid_project_cam/src
touch laserhandle.cpp
touch lidtocamp.cpp
感谢这位博主提供的代码:https://blog.csdn.net/qq_33287871/article/details/107587233
laserhandle.cpp:
ros::Publisher pubLaserCloud;
void laserCloudHandler(pcl::PointCloud<pcl::PointXYZ> laserCloudIn)
{
std::vector<int> indices;
pcl::removeNaNFromPointCloud(laserCloudIn, laserCloudIn, indices);
int cloudSize = laserCloudIn.points.size();
sensor_msgs::PointCloud2 cornerPointsMsg;
pcl::toROSMsg(laserCloudIn, cornerPointsMsg);
pubLaserCloud.publish(cornerPointsMsg);
}
std::string getFrameStr(unsigned int frame)
{
if(frame>9999)
return "00000"+std::to_string(frame);
else if(frame>999)
return "000000"+std::to_string(frame);
else if(frame>99)
return "0000000"+std::to_string(frame);
else if(frame>9)
return "00000000"+std::to_string(frame);
else if(frame9)
return "000000000"+std::to_string(frame);
}
void my_handler(int s){
std::cout<<"Finishing program with signal "<<s<<std::endl;
exit(1);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "laserhandle");
ros::NodeHandle nh;
struct sigaction sigIntHandler;
sigIntHandler.sa_handler = my_handler;
sigemptyset(&sigIntHandler.sa_mask);
sigIntHandler.sa_flags = 0;
sigaction(SIGINT, &sigIntHandler, NULL);
pubLaserCloud = nh.advertise<sensor_msgs::PointCloud2>
("/velodyne_cloud", 10);
pcl::PointCloud<pcl::PointXYZ> cloud;
// allocate 4 MB buffer (only ~130*4*4 KB are needed)
int32_t num = 1000000;
float *data = (float*)malloc(num*sizeof(float)); //equal to float *data = float[num];分配内存空间
// pointers
float *px = data+0;
float *py = data+1;
float *pz = data+2;
float *pr = data+3;
unsigned int currentFrame = 0;
std::string file = "点云数据data路径" + getFrameStr(currentFrame) + ".bin";
FILE *stream;
stream = fopen (file.c_str(),"rb");
//std::cout<<file<<std::endl;
ros::Rate r(10);
while(stream!=NULL)
{
num = fread(data,sizeof(float),num,stream)/4;
cloud.clear();
for (int32_t i=0; i<num; i++) {
pcl::PointXYZ point;
point.x = *px;
point.y = *py;
point.z = *pz;
cloud.push_back(point);
px+=4; py+=4; pz+=4; pr+=4;
}
laserCloudHandler(cloud);
//reset variables to read a new sweep
fclose(stream);
currentFrame++;
file = "点云数据data路径" + getFrameStr(currentFrame) + ".bin";
//std::cout<<file<<std::endl;
fflush(stream);
stream = fopen (file.c_str(),"rb");
free(data);
num = 1000000;
data = (float*)malloc(num*sizeof(float));
px = data+0;
py = data+1;
pz = data+2;
pr = data+3;
r.sleep();
}
free(data);
return 0;
}
lidtocamp.cpp:
using namespace cv;
using namespace std;
unsigned int currentFrame = 0;
//3x3 rectifying rotation to make image planes co-planar, R_rect_0X:3x3
Eigen::Matrix<double,4,4> R_rect_02;
//3x4 projection matrix after rectification, P_rect_02:3x4
Eigen::Matrix<double,3,4> P_rect_02;
//Transform from velo to cam0, T:4x4
Eigen::Matrix<double,4,4> extrinsicT;
Mat image ;
string getFrameStr(unsigned int frame)
{
if(frame>9999)
return "00000"+to_string(frame);
else if(frame>999)
return "000000"+to_string(frame);
else if(frame>99)
return "0000000"+to_string(frame);
else if(frame>9)
return "00000000"+to_string(frame);
else if(frame9)
return "000000000"+to_string(frame);
}
//把激光点云坐标投影到相机二维平面
Eigen::Vector3d transformProject(const Eigen::Vector4d& P_lidar)
{ Eigen::Vector3d z_P_uv = P_rect_02*R_rect_02*extrinsicT*P_lidar;
return Eigen::Vector3d( int( z_P_uv[0]/z_P_uv[2] + 0.5 ) , int( z_P_uv[1]/z_P_uv[2] + 0.5 ), 1 );
}
void pointCloudCallback(const sensor_msgs::PointCloud2::ConstPtr &PointCloudMsg)
{
std::string image_name = "图像image_02 data路径" + getFrameStr(currentFrame) + ".png";
cout << "currentFrame:"<< currentFrame << endl;
image = imread(image_name);//原图
Mat image_show = image.clone();
//将点云转为pcl格式
pcl::PointCloud<pcl::PointXYZ> laserCloudIn;
pcl::fromROSMsg(*PointCloudMsg, laserCloudIn);
int pointcloudsize = laserCloudIn.size(); //点云个数
cout<<"received pointcloud feature size per sweep = "<<pointcloudsize<<endl;
vector<Point2f> point;
int count = pointcloudsize;
for(int i = 0; i < pointcloudsize; i++){
Point2f cv_point;
Eigen::Vector4d P_lidar(laserCloudIn.points[i].x,
laserCloudIn.points[i].y,
laserCloudIn.points[i].z,
1);
Eigen::Vector3d P_uv = transformProject(P_lidar);
//去除不在图像上的投影点,并把点转为cv::Point2f类型
if(P_uv[0] >= 0 && P_uv[1] >= 0 && P_uv[0]1242 && P_uv[1]375){
cv_point.x = P_uv[0];
cv_point.y = P_uv[1];
circle(image_show,cv_point,1,Scalar(0,255,0));
point.push_back(cv_point);
}
else{
count--;
}
}
int num = point.size();
cout<<"pointcloudsize after verify = "<<num<<endl<<endl;
imshow("fusion" , image_show);
waitKey(10);
currentFrame++;
}
int main( int argc, char** argv)
{
ros::init(argc, argv, "lidtocam");
ros::NodeHandle nh;
R_rect_02 << 9.999758e-01, -5.267463e-03, -4.552439e-03, 0,
5.251945e-03, 9.999804e-01, -3.413835e-03, 0,
4.570332e-03, 3.389843e-03, 9.999838e-01, 0,
0 ,0 , 0, 1;
P_rect_02 << 7.215377e+02, 0.000000e+00, 6.095593e+02, 4.485728e+01,
0.000000e+00, 7.215377e+02, 1.728540e+02, 2.163791e-01,
0.000000e+00, 0.000000e+00, 1.000000e+00, 2.745884e-03;
extrinsicT << 7.533745e-03, -9.999714e-01, -6.166020e-04, -4.069766e-03,
1.480249e-02, 7.280733e-04, -9.998902e-01, -7.631618e-02,
9.998621e-01, 7.523790e-03, 1.480755e-02, -2.717806e-01,
0 , 0, 0, 1;
ros::Subscriber pointCloudSub = nh.subscribe("/velodyne_cloud", 10 ,pointCloudCallback );
ros::spin();
return 0;
}
三、创建launch功能包
1. 创建launch包
在catkin_ws/src下用 catkin_create_pkg 创建 launch 包,不添加任何依赖项
catkin_create_pkg launch
2. 创建 run.launch 文件
进入 ~/catkin_ws/src/launch 目录,创建 run.launch 文件
cd launch
touch run.launch
3. 编写 run.launch 文件
分为两个ROS节点,一个节点负责不断读取点云原始bin文件,并以 sensor_msgs::PointCloud2 的消息格式发布话题;另一个节点对接收到的点云消息进行处理,把点云投影到相机图像上。
内容如下:
<launch>
<node pkg="Lid_project_cam" name = "laserhandle" type = "laserhandle" output="screen" />
<node pkg="Lid_project_cam" name = "lidtocamp" type = "lidtocamp" output="screen" />
</launch>
四、在project功能包添加其他依赖
因为投影过程中要用到PCL,可视化要用到Opencv,所以我们需要加入PCL和Opencv的依赖到投影功能包中
1. 修改project目录下的CMakeLists.txt
(1)修改 find_package
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
sensor_msgs
cv_bridge
image_transport
pcl_conversions
pcl_ros
)
find_package(OpenCV REQUIRED)
(2)修改 include_directories
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
(3)生成可执行文件并连接到库
add_executable(laserhandle src/laserhandle.cpp)
target_link_libraries(laserhandle ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})
add_executable(lidtocamp src/lidtocamp.cpp)
target_link_libraries(lidtocamp ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})
2. 修改project目录下的package.xml
在package.xml添加:
<build_depend>libpcl-all-dev</build_depend>
<exec_depend>libpcl-all</exec_depend>
五、编译project功能包
cd ~/catkin_ws/
catkin_make
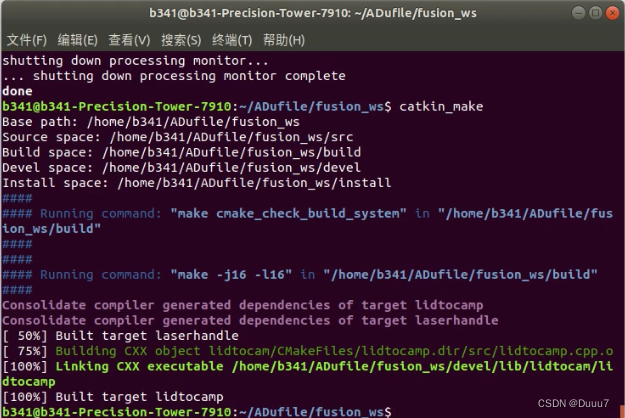
显示下图则编译成功,在/catkin_ws/devel/lib/project下有了两个可执行文件:laserhandle和lidtocamp

六、投影效果展示
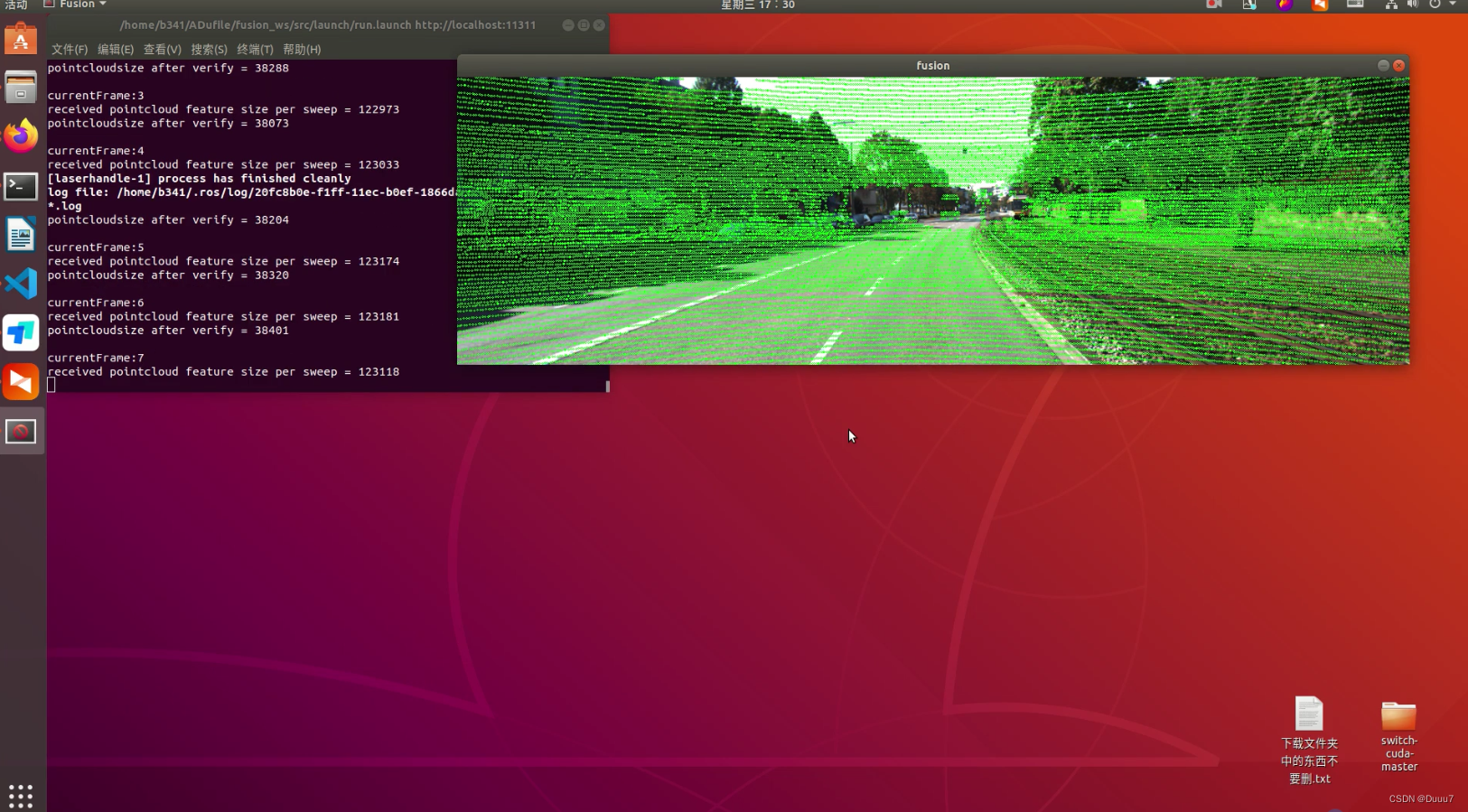
启动run.launch文件,实现节点收发
roslaunch launch run.launch
投影效果如下图所示:
演示视频:https://www.bilibili.com/video/BV1XL4y1A7zN?spm_id_from=333.999.0.0&vd_source=85578835a77d53d45d756c48a7f801c6
参考致谢:
https://blog.csdn.net/qq_43944331/article/details/117470536
https://blog.csdn.net/EchoChou428/article/details/105257293
https://blog.csdn.net/qq_28306361/article/details/85142192
https://blog.csdn.net/qq_33287871/article/details/107587233
Original: https://blog.csdn.net/weixin_46118817/article/details/125434457
Author: Duuu7
Title: 【ROS】利用ROS将KITTI数据集点云数据投影到2D图像
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/719839/
转载文章受原作者版权保护。转载请注明原作者出处!