

先下载yolo5项目:
https://github.com/ultralytics/yolov5
用pycharm新建一个项目
勾选Inherit global site-packages 使用base interpreter的所有packages
不勾选 Make available to all projects 因为这个指当在虚拟环境下安装包的时候,copy一份到全局。就是base interpreter中会添加这个项目中的所有包
项目新建后,把yolo5 解压后所有文件和文件夹复制到pycharm项目里面,把requirements.txt打开,这时候先不要用pycharm安装依赖包,先看看有哪些。
其中,matplotlib,numpy,opencv-python,scipy,torch,torchvision,pandas,seaborn这些是机器学习/深度学习中常用的工具包,所有应该安装在全局环境里面也就是base interpreter添加这个包
细节说明yolo5项目有成熟的torch框架实现,到现在并没有成熟的tensorflow框架板,而且torch和tensorflow都有cpu和gpu版本,如果你没有支持cuda的高性能显卡,或者图省事简单,安装cpu版本更适合俺们
先手动在cmd里面安装opencv python版
到
https://pypi.tuna.tsinghua.edu.cn/simple/opencv-python/
选择匹配你设备的whl文件
细节cp39(指对应你安装的python sdk的版本 比如python39)
cmd窗口下pip install “pathxxxxx/.whl”
稍后安装成功
此时已经安装了opencv,我们来玩一玩,在新建一个python项目,在main下面添加以下代码
import cv2
capture = cv2.VideoCapture(0) #使用电脑的内置像头 1的话应该是usb外置像头
while (True):
# 获取一帧
ret, frame = capture.read()
frame = cv2.flip(frame, 1) #cv2.flip 图像翻转,因为摄像头本来录制的是与现实相反的
cv2.imshow('frame',frame)
# 如果输入q,则退出
if cv2.waitKey(1) == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
没有意外的话,你就能看见自己英俊的脸庞。ok小的体验到此结束。
然后开始yolo
https://pypi.tuna.tsinghua.edu.cn/simple/matplotlib
https://pypi.tuna.tsinghua.edu.cn/simple/seaborn
下载他们的whl文件,这个是可视化显示所需要的,但是在我的文章中是用不到的,既然项目文件requirements.txt所要求的,那么我们还是当一个好学生吧。matplotlib是负责可视化的,seaborn是美化matplotlib的样式的
https://pypi.tuna.tsinghua.edu.cn/simple/numpy
https://pypi.tuna.tsinghua.edu.cn/simple/pandas
其实上面这几个安装比较简单,你要是图省事,也可用全部用pycharm的功能安装,不用手动了,因为后面torch,torchvision这两个有细节
细节1是torch cpu和gpu版本
细节2是torch得对应torchvision版本
用pycharm可以确保版本对应,但是你不支持gpu他可能会给你安装上gpu版本的torch,而且国外网络下载看你运气 torch 200mb
剩余的scipy包请自己拼接链接地址下载安装,没啥细节
再打开第一次新建的项目,就是你已经复制了yolo到里面去的那个,然后提示缺什么包,确认就ok,基本剩下的包不会占很大,会用pycharm自动安装上
然后用pycharm run运行detect.py就ok,其他文章中用cmd方式是一样的,默认参数有目标图片,不需要用cmd填写
运行过程中,如果是第一次运行,会下载模型文件,有网就ok
然后你就能看到控制台 打印预测后的文件信息
这样的话yolo就ok了
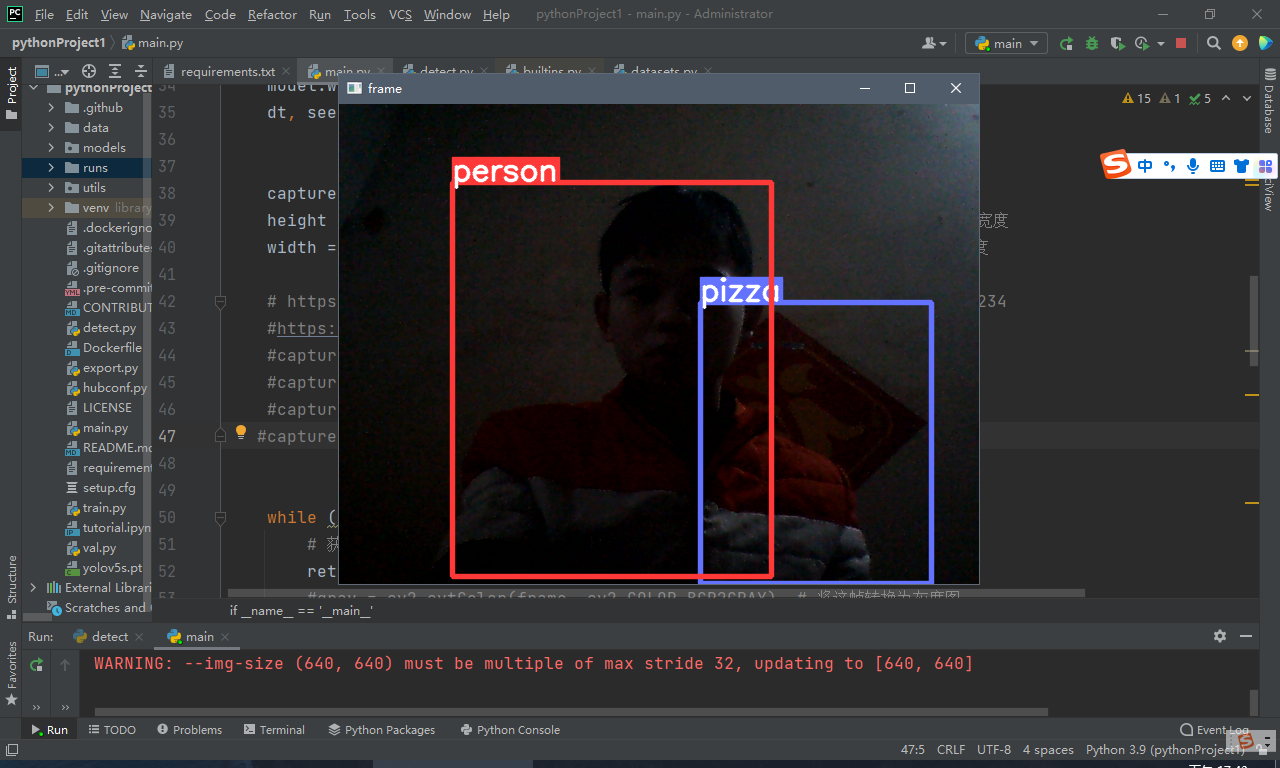
剩下就是对open cv中的没一帧进行模型推到处理后再显示,我的电脑很垃圾,像放ppt。
import cv2
import numpy as np
import torch
from models.common import DetectMultiBackend
from utils.general import check_img_size,non_max_suppression
from utils.plots import Annotator, colors
from utils.torch_utils import select_device
from utils.augmentations import letterbox #调整图片大小至640
if __name__ == '__main__':
# Load model
device = select_device('')
weights="C:\\Users\\Administrator\\Desktop\\yolov5s.pt"
dnn = False
data="C:\\Users\\Administrator\\Desktop\\coco128.yaml"
model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data)
stride, names, pt, jit, onnx, engine = model.stride, model.names, model.pt, model.jit, model.onnx, model.engine
imgsz = check_img_size((640, 640), s=stride) # check image size
model.warmup() # warmup
capture = cv2.VideoCapture(0)
height = capture.get(cv2.CAP_PROP_FRAME_HEIGHT) # 计算视频的高 # 获取视频宽度
width = capture.get(cv2.CAP_PROP_FRAME_WIDTH) # 计算视频的宽 # 获取视频高度
#https://blog.csdn.net/weixin_41010198/article/details/88535234
#capture.set(cv2.CAP_PROP_BRIGHTNESS,50)#亮度
#capture.set(cv2.CAP_PROP_CONTRAST,18)#对比度
#capture.set(cv2.CAP_PROP_SATURATION,70)# 图像的饱和度(仅适用于相机)
#capture.set(cv2.CAP_PROP_EXPOSURE,200)
#如果你感兴趣可以去调调参数
while (True):
# 获取一帧
ret, frame = capture.read()
#gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 将这帧转换为灰度图
frame = cv2.flip(frame, 1) #cv2.flip 图像翻转
img0=frame
img = letterbox(frame)[0] #返回的是元组所以[0]
# Convert
img = frame.transpose((2, 0, 1))[::-1] # HWC to CHW, BGR to RGB
img = np.ascontiguousarray(img) #用tensor的说法 转为张量?
im = torch.from_numpy(img).to(device)
#im=im.half()
im=im.float() # uint8 to fp16/32 #转为float,除以255可以得小数
im /= 255 # 0 - 255 to 0.0 - 1.0 #归一化
if len(im.shape) == 3:
im = im[None] # expand for batch dim
#im已经是预处理后的张量了,这才符合网络输入,而img0表示位图,帧
pred = model(im, augment=False,visualize=False)#augmented inference # visualize features增强推理#可视化特征
# NMS 非极大值抑制
pred = non_max_suppression(pred)
det=pred[0]
annotator = Annotator(frame, line_width=3, example=str(names))
for *xyxy, conf, cls in iter(det):#一个图片里面可能不止一个目标对象,比如两个人,比如一人一狗,所以用循环
c=int(cls)
label =names[c]
annotator.box_label(xyxy, label, color=colors(c, True))
im0 = annotator.result()
cv2.imshow('frame',im0)
# 如果输入q,则退出
if cv2.waitKey(1) == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
这上面的代码是根据官方detect.py文件,粘贴复制出来的,感兴趣的朋友可以自己对detect.py运行过程监听print看看,我这个自从图片上标示出来,想获得字符串可以自己去添加一下。
这个用的是yolo给的默认模型,根据场景需求,你可以自己训练,不算难,然后刚开始,我很介意这个是torch版本实现的,因为我只会tensorflow,根本不会torch,但是官方已经给了导出tf模型的py文件,在用自己的训练好后,我们转化一下就ok
对了,我本来是搞web的,最熟悉的还是java,目前最近几年会进一步学习人工智能,然后群号 517103280,这个QQ群,欢迎加入交流
cpu版本运行数据 主要是模型推到没有cuda加速卡的,open cv直接显示不卡

如果想折腾,可以自己调调大小参数
这位大哥的文章不错,可以看下,然后yolo的一些应该得看看
https://blog.csdn.net/weixin_29343153/article/details/113090000?utm_source=app&app_version=4.16.0&code=app_1562916241&uLinkId=usr1mkqgl919blen

Original: https://blog.csdn.net/qq_37390245/article/details/122814191
Author: 民谣与狗
Title: opencv-python和yolo5(torch)实现实时检测
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/703995/
转载文章受原作者版权保护。转载请注明原作者出处!