

传统机器算法
2022.4.11
- 图像预处理
图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性、最大限度地简化数据,从而改进特征提取、图像分割、匹配和识别的可靠性。 一般的预处理流程为: 灰度化->几何变换->图像增强
- 图像增强
增强图像中的有用信息,它可以是一个失真的过程,其目的是要改善图像的视觉效果,针对给定图像的应用场合,有目的地强调图像的整体或局部特性,将原来不清晰的图像变得清晰或强调某些感兴趣的特征,扩大图像中不同物体特征之间的差别,抑制不感兴趣的特征,使之改善图像质量、丰富信息量,加强图像判读和识别效果,满足某些特殊分析的需要。
图像增强可分成两大类:频率域法和空间域法。
1.频率域法
频率域法是一种间接图像增强算法,把图像看成一种二维信号,对其进行基于二维傅里叶变换的信号增强。采用低通滤波(即只让低频信号通过)法,可去掉图中的噪声;采用高通滤波法,则可增强边缘等高频信号,使模糊的图片变得清晰。
2.空间域法
空间域法是一种直接图像增强算法,分为点运算算法和邻域去噪算法。
点运算算法即灰度变换(伽马变换、对数增强)和直方图修正等。
邻域增强算法分为图像平滑和锐化两种。平滑常用算法有均值滤波、中值滤波。锐化常用算法有梯度法(如Roberts梯度法)、算子法(Sobel算子和拉普拉斯算子等)、掩模匹配法、统计差值法等。
- 传统的边缘检测算子
1、Roberts算子
Robert是最老的算子之一
掩膜:只使用当前像素的 2 x 2 邻域
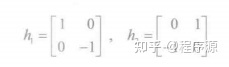

边缘幅度的计算:对角相减 再 相加

Roberts算子的主要缺点是其对 噪声的 高度敏感性,原因在于仅使用了很少几个像素来近似梯度
2、Laplace 算子
通常使用 3 x 3 的邻域,Laplace是 近似给出 边缘幅值的 二阶导数的 流行方式
4-邻接 掩膜:
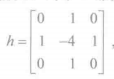
8-邻接 掩膜:
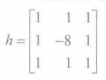
Laplace算子有一个缺点是它对图像中的 某些边缘产生双重响应。
3、Prewitt算子
Prewitt 是 近似一阶导数
对于3 x 3 的卷积掩膜,在8个可能方向(有8个卷积掩膜)上估计梯度
具有 最大幅值的卷积给出 梯度方向
前三个卷积掩膜(后续的可以通过”旋转”获得):

4、Sobel
Sobel 是 近似一阶导数,具有 最大幅值的卷积给出 梯度方向
Sobel算子是通常使用与 水平和垂直边缘的一个简单检测子

5、Kirsch算子

边缘检测算子的主要缺点:
它们依赖物体的大小,且对噪声敏感
- Canny算法
Canny边缘提取 是 Canny 提出了一种新的边缘检测方法
Canny边缘检测分四个阶段
1.去噪 通过一个5*5的高斯滤波器完成;
2.找图像的边缘。利用Sobel kernel得到水平和垂直方向两个方向的梯度。
3.过滤非最大值。在高斯滤波中,边缘很有可能被放大了。过滤不是边缘的点.
4.使用两个值域来检测边缘。它设置两个阀值,分别为maxVal和minVal。其中大于maxVal的
都被检测为边缘,而低于minval的都被检测为非边缘。对于中间的像素点,如果与确定为边缘的
像素点邻接,则判定为边缘;否则为非边缘。
它对 受白噪声影响的 阶跃型边缘是 最优的
检测子的 最优性与以下的 三个标准有关:
1、检测标准:不丢失重要的边缘,不应有虚假的边缘。
2、定位标准:实际边缘与检测到的边缘位置之间的偏差最小。
3、单响应标准:将多个响应降低为单个边缘响应。
最优性标准是基于如下要求:”检测”重要边缘、小的”定位”误差、”单边缘响应”。该检测子与一个对称 2D 高斯做卷积,再沿梯度方向微分;接着的步骤包括”非最大边缘抑制”、”滞后阈值化处理”和”特征综合”。
在Canny算法中,非极大值抑制是进行边缘检测的重要步骤,通俗意义上是指 寻找像素点局部最大值,将非极大值点所对应的灰度值置为0,这样可以剔除掉一大部分非边缘的点(这是本人的理解)。 根据图可知,要进行非极大值抑制,就首先要确定像素点C的灰度值在其8值邻域内是否为最大。
2023.6.15
- 数字图像处理基本概念速览
1、数字图像处理
概念:
彩色图像和非彩色图像,彩色图像由三色图组成,非彩色图像由黑白和各种灰色组成黑白图像,记录物体的光强度。
模拟图像和数字图像,按图像空间坐标和亮度(或色彩)的连续性可分为模拟图像和数字图像。模拟图像可用连续函数来描述,光照位置和光照强度均为连续变化的。数字图像可用矩阵或数组来描述,空间位置和亮度都为离散的整数值。
数字图像需要借助计算机才能够显示,数字图像处理也称为计算机图像处理。
内容、特点及应用:
狭义图像处理:图像到图像的操作,包括图像增强、图像压缩等,处理对象为像素。
图像分析:对图像中的目标进行检测和测量,从而获得图像描述 的处理,处理对象为目标。
图像理解:在图像分析的基础上,对图像中的目标用符号加以表示,并研究符号的属性和符号间的关系。
精度高:数字化中不管用多少比特表示,只需要改变程序的参数,处理方法不变,而模拟图像需要对装置进行改进
再现性好:以数组或数组集合表示,数据不易丢失或遭破坏,而模拟图像处理中,容易受各种干扰因素影响。
通用性、灵活性强:对于各种图像,虽然所用设备和精度各不相同,但将图像数字化后,对于计算机而言,都可进行相同处理操作。同时,可以对图像进行各种处理,如:合成、拼接、放大、缩小等。
- 图像的数字化:由模拟图像获取满足需求的数字图像
- 图像变换 :处理问题简化、有利于特征提取、加强对图像信息的理解,重点:傅里叶变换的算法、性质和应用。
- 图像增强:增强图像的有用信息,削弱噪声的干扰。
- 图像的回复与重建:把退化、模糊了的图像复原。包括图像辐射校正和几何校正的内容。
- 图像编码:简化图像的表示,压缩图像数据,便于存储和传输。
2、数字图像的获取
- 数字的图像化
图像数字化—把一幅图画分割成一个个小区域(像元或像素),并将各小区域用整数值来表示,形成一幅点阵的数字图像。像素属性=(位置,灰度/颜色)
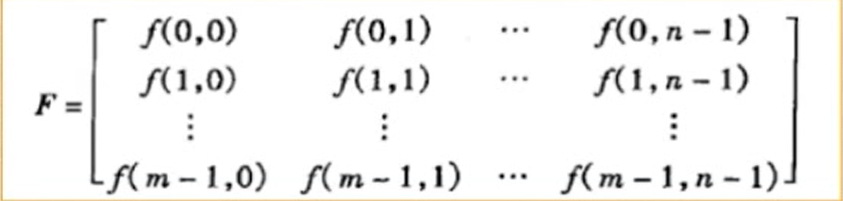
- 数字图像的表示
用矩阵来描述,数字图像根据灰度级数的差异可分为: 黑白图像、 灰度图像、 彩色图像。
黑白图像:每个像素只能是黑或者白,没有中间过渡,又称为二值图像。像素值为0或1
灰度图像:每个像素的信息由一个量化的灰度来描述,没有彩色信息。 八比特数值表示,[0,255]。
彩色图像: RBG红绿蓝三个通道分量构成,分别由不同的灰度级描述,每一个灰度级使用一个字节,即彩色图像一个像素需要三个字节。24位表示三个通道
- 数字图像化的过程
包括: 采样、量化
采样:将空间上连续的图像变换为离散点的操作
采样间隔:采样点之间的距离
采样孔径:采样采用的形状和大小
采样方式:有缝、无缝、重叠
量化: 像素灰度转换为离散的整数值的过程
图像数据量:M _N、灰度级为G的图像所需的存储空间M_N*g(bit)为图像数据量
- 采样、量化参数与数字化图像间的关系
数字化方式可分为均匀采样、量化和非均匀采样、量化
“均匀”:采样、量化为等间隔方式。图像数字化一般采用均匀采样和均匀量化方式
非均匀采样:根据图像细节的丰富程度改变采样间距,细节丰富的地方采样间距小,否则间距大。
非均匀量化:对图像层次少的区域采用间隔大量化,对图像层次丰富的区域采用间隔小来能量化。
采样间隔越大,图像像素数越少,空间分辨率低,质量差
采样间隔越小,图像像素数越多,空间分辨率高,质量好,但数据量大
3、灰度直方图
概念:反应一幅图像中各灰度级像素出现的频率和灰度级的关系。以灰度级为横坐标,频率为纵坐标,绘制直方图。是图像的一个重要特征,反应了图像灰度分布的状况。
性质:只能反映灰度分布情况,不能反应图像像素的位置,丢失了像素的位置信息。一幅图像,多个区域的直方图之和为原图像的直方图。
应用:判断图像量化是否恰当;用于确定图像二值化的阈值。
Original: https://blog.csdn.net/adamancy_/article/details/124122619
Author: 观察人类ing_
Title: 【自用】图像算法、计算机视觉面试问题及答案1.0
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/703147/
转载文章受原作者版权保护。转载请注明原作者出处!