

场景:检测自然环境中的行人
识别:就是对物体进行分类
检测:就是回答是否有人
流程->检测->识别
思想:
大多数检测算法的核心思想是把图像拆分成很多小的块,然后将每个图像块分类为包含行人或者不包含行人两类
算法步骤为 Hog特征+SVM 检测是否有行人
步骤:
1.建立包含行人的一个图像数据库。这将作为我们的正数据样本
2.建立不包含行人的一个图像数据库。这将作为我们的负数据样本.
3.在数据集上训练一个SVM
4.将SVM应用于每个可能的测试图像块,以确定整个图像是否包含一个行人.
数据集介绍
该数据集一共提供了924张包含行人的彩色图像,
每张图像都缩放为64×128像素并对齐,这样人的身体就处在图像的中心位置了
这些图像是在波士顿和剑桥处于不同季节时以及各种不同光照情况下拍摄的
用OpenCV读取图像,并将图像的RGB版本传递给matplotlib来可视化一些示例图像
import cv2
import numpy as np
import matplotlib.pyplot as plt
import random
"查看下数据库的图片,随机抽取5张图片"
people = []
for i,data in enumerate(np.random.randint(1,900,5)):
filename = f"data/pedestrians128x64/per{data:05d}.ppm"
img = cv2.imread(filename)
people.append(cv2.cvtColor(img,cv2.COLOR_BGR2RGB))
plt.subplot(1,5,i+1)
plt.imshow(cv2.cvtColor(img,cv2.COLOR_BGR2RGB))
plt.axis("off")
people = np.array(people)
people.shape
(5, 128, 64, 3)


Hog 方向梯度直方图(Histogram of Oriented Gradient, HOG)
Hog特征常用来结合SVM分类器 来达到检测目的
作用:用来进行物体检测的特征描述子
原理:
通过计算和统计图像局部区域的梯度方向直方图来构成特征,在一副图像中,局部目标的表象和形状能够被梯度或边缘的方向密度分布很好地描述.
其本质为:梯度的统计信息,而梯度主要存在于边缘的地方.
基本思想:
边缘方向的分布可以描述图像中物体的局部形状和外观。把图像拆分成小的连通区域,在这些区域内编译梯度方向(或者边缘方向)直方图。然后,描述符是通过连接不同的直方图组合而成的.
优点:
1.HOG是在图像的局部方格单元上操作,所以它对图像几何的和光学的形变都能保持很好的不变性
2.在粗的空域抽样、精细 的方向抽样以及较强的局部光学归一化等条件下,只要行人大体上能够保持直立的姿势,可以容许行人有一些细微的肢体动作,这些细微的动作可以被忽略而不影响 检测效果.
Hog中的窗口(win),区块(block),cell
1.win(窗口):在HOG特征提取时,一个窗口是最小的特征提取单元,类似于深度学习中的卷积.其运算公式一样
以示例图像为例输入图像(128, 64, 3),win大小为32×32,步长为(8,8),在输入两端各添加P个0,
那么滑动次数为:列上滑动: (128-32)/8 = 12次,行上滑动 (64-32)/8 = 4
共滑动得到 12×4 = 48 个窗口
2.block :
假设block 设置为 8×8, 步长为(8,8), 此时一个窗口内,有 (32-8)/8 =3,
行同样如此,共3×3 = 9个block 这张图片共 48×9 = 432个block
3.cell
这里的cell,可以理解为不可再分的基本单元,cell类似于将block直接分块,
若cell大小为(4×4) 则一个block 64/16 = 4个cell ,这张图共 48x9x4 = 1728个cell
注意点:
win可以用padding填充,但是block 和cell ,HOG算法不允许填充.可能存在的问题,设置block和cell有误,无法得到整数,从而产生错误
提取Hog特征的步骤
1.色彩和伽马归一化,
将整个图像进行规范化(归一化),Gamma归一化
2.计算图像梯度 ,计算图像横坐标和纵坐标方向的梯度,并据此计算每个像素位置的梯度方向值 Sobel
3.构建方向的直方图:
每个cell中都有一个方向梯度直方图,计算采用加权的方式,权值是根据该像素点的梯度幅度计算出来.
研究发现,采用无向的梯度和9个直方图通道,能在行人检测试验中取得最佳的效果。
而在这种情况下方向的范围划分为 180/9 = 20度
此时,一个cell的维度为 9,一个block的维度为 9 x 4,一个win 的维度为 9x4x9,
一张图像的维度为9x4x9x48(Gray),9x4x9x48x3(RGB)
4.将细胞单元组合成大的区间
5.收集HOG特征,把提取的HOG特征输入到SVM分类器中,寻找一个最优超平面作为决策函数
opencv中使用cv2.HOGDescriptor访问HOG描述符,正如上面介绍的
他接受一些输入参数,win,block,cell,stride
对于每一个单元格,HOG描述符默认用9个bin计算一个面向梯度的直方图
hog = cv2.HOGDescriptor(winSize,blockSize,blockStride,cellSize,nbins,derivAperture,winSigma,histogramNormType,L2HysThreshold,gammaCorrection,nlevels)
""""""
IMG = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(IMG,cmap= 'gray')
HOG = cv2.HOGDescriptor((64,64),(32,32),(32,32),(16,16),9)
aa_RGB = HOG.compute(img,(64,64))
aa_Gray = HOG.compute(IMG, (64, 64))
'''此时我们衡量一下单通道和三通道得到的HOG矩阵相似度
相似度计算:均方误差、SSIM 结构相似性度量、cosine余弦距离、直方图'''
from sklearn.metrics import mean_squared_error
MSE = mean_squared_error(aa_RGB,aa_Gray)
MSE
7.5363835e-07

由上面可知,我们再从一个例子来理解Hog算子
图片(128,64)
winSize (64,64),winStride(64,64),blockSize(32,32)blockStride(32,32)
cellSize(16,16) ,nbin 9
单通道:(128x64x1)
Win:2个,block:2×4 ,cell :2x4x4
bins = 2x4x4x9 = 288 即得到(288,1)
三通道也是如此,通过计算两个Hog矩阵的MSE 发现均方误差仅仅为0.00045,推测cv2中hog计算应该也是先将图片灰度化,然后再处理
不过查看HOGDescription 未发现灰度化函数,但有看到计算梯度值的函数 computeGradient()
'''opencv HOGDescriptor 参数介绍,实测无法使用*args, **kwargs会报错'''
winSize = (20,20)
blockSize = (10,10)
blockStride = (5,5)
cellSize = (10,10)
nbins = 9
derivAperture = 1
winSigma = -1.
histogramNormType = 0
L2HysThreshold = 0.2
gammaCorrection = 1
nlevels = 64
signedGradient = True
cv2.HOGDescriptor(winSize,blockSize,blockStride,cellSize,nbins,derivAperture,winSigma,histogramNormType,L2HysThreshold,gammaCorrection,nlevels, signedGradient)
<hogdescriptor 000002b28068e450>
</hogdescriptor>
sss1 = "%05d" %12
sss2 = "12".zfill(5)
sss3 = f"{1:05d}"
sss1,sss2,sss3
('00012', '00012', '00001')
'''我们可以看到数据集中的人占比相当大,可以采用大的参数设定'''
Hog = cv2.HOGDescriptor((48,96),(16,16),(8,8),(8,8),9)
'''从900张图片随机选取400张,正样本'''
x_index = []
for i in random.sample(range(1,900),400):
filename = f"data/pedestrians128x64/per{i:05d}.ppm"
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
x_index.append(Hog.compute(img,(64,64)))
x_positive_hog = np.array(x_index,dtype=np.float32)
y_positive = np.ones(x_positive_hog.shape[0],dtype=np.int32)
'''SVM的负样本--不是人系列 环境'''
import os
x_neg = []
for file in os.listdir("data/pedestrians_neg"):
filename = f"data/pedestrians_neg/{file}"
img = cv2.imread(filename)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = cv2.resize(img, (512,512))
"图片随机切割成128,64的图片加入到x——neg中"
for i in range(8):
random_x = random.randint(0,380)
random_y = random.randint(0,440)
img_random = img[random_x:random_x+128,random_y: random_y + 64]
x_neg.append(img_random)
'''查看一下分割的图片'''
x_negative = np.array(x_neg)
y_negative = np.zeros(x_negative.shape[0],dtype=np.int32)
'''计算非人的HOG'''
x_neg_hog =np.array(list(map(lambda data:Hog.compute(data,(64,64)),x_negative)),dtype=np.float32)
environments = []
for i,data in enumerate(np.random.randint(1,400,5)):
environments.append(x_negative[data,:])
environments = np.array(environments)
x_neg_hog.shape,environments.shape
((400, 1980, 1), (5, 128, 64, 3))
'''正负样本叠加在一起,负样本 400张,正样本400张'''
feature = np.concatenate((x_positive_hog,x_neg_hog))
target = np.concatenate((y_positive,y_negative))
'''数据集拆分'''
from sklearn.model_selection import train_test_split
xTrain,xTest,yTrain,yTest = train_test_split(feature,target,test_size=0.2,random_state=7)
def train_svm(xTrain,yTrain):
svm = cv2.ml.SVM_create()
svm.train(xTrain,cv2.ml.ROW_SAMPLE,yTrain)
return svm
def score_svm(svm,xTest,yTest):
from sklearn.metrics import accuracy_score
_,y_pre = svm.predict(xTest)
return accuracy_score(y_pre,yTest)
svm = train_svm(xTrain,yTrain)
'''过拟合,在测试数据集表现不加'''
score_svm(svm,xTrain,yTrain),score_svm(svm,xTest,yTest)
(1.0, 0.475)
”’通过bootstrapping 对SVM调优”’
思想:找出xTest中预测为是,但是实际为负样本的例子,将其添加到xTrain训练集中,用添加的假阳性重新训练SVM,重复执行这个过程,直到SVM给出满意的性能.
步骤:
1)对模型进行训练和评分
2)找出测试集中的假阳性
3)把假阳性添加到训练集中,重复
def get_best_svm(xTrain,xTest,yTrain,yTest):
score_train ,score_test= [],[]
for j in range(4):
svm = train_svm(xTrain,yTrain)
score_train.append(score_svm(svm,xTrain,yTrain))
score_test.append(score_svm(svm,xTest,yTest))
_,y_pred = svm.predict(xTest)
'''将预测失败的图片添加进train中'''
flag1,flag2 = yTest.ravel() == 0,y_pred.ravel() == 1
flag = flag1 == flag2
xTrain_append = xTest[flag,:]
yTrain_append = yTest[flag]
if yTrain_append.shape[0] == 0:
print('no more false predict')
return svm,score_train,score_test
else:
xTrain = np.concatenate((xTrain,xTrain_append),axis=0)
yTrain = np.concatenate((yTrain,yTrain_append))
SVM_best,score_train,score_test = get_best_svm(xTrain,xTest,yTrain,yTest)
no more false predict
plt.plot(list(range(len(score_train))),score_train)
plt.plot(list(range(len(score_test))),score_test)
plt.title("bootstrapping")
plt.legend(["train_score","test_score"])
plt.show()

计算Hog,灰度图像必须是整数 ->Hog -> float32 ->SVM
aaaa = np.array([[1,1,1],[2,2,2],[3,3,3],[4,4,4]])
bbbb = np.array([[[1,1,1],[2,2,2],[3,3,3],[4,4,4]]])
'''np.random.shuffle 是按照数组的最高维度来打乱数据分布'''
np.random.shuffle(aaaa)
np.random.shuffle(bbbb)
aaaa,bbbb
(array([[3, 3, 3],
[1, 1, 1],
[4, 4, 4],
[2, 2, 2]]),
array([[[1, 1, 1],
[2, 2, 2],
[3, 3, 3],
[4, 4, 4]]]))
'''测试 训练好的svm'''
dataset = np.concatenate((people,environments),axis=0)
predict = []
'''打乱数据集'''
np.random.shuffle(dataset)
for i,data in enumerate(dataset):
feature_hog = Hog.compute(data,(64,64))
feature_hog = feature_hog.reshape((1,1980))
_,pre_0 = SVM_best.predict(feature_hog)
predict.append(pre_0)
predict = np.array(predict)
predict.shape
(10, 1, 1)
'''随机选择10个样本,显示数据与预测'''
for i,data in enumerate(dataset):
plt.subplot(2,5,i+1)
plt.title(f"{predict[i]==1}")
plt.imshow(data,cmap='gray')
plt.axis("off")
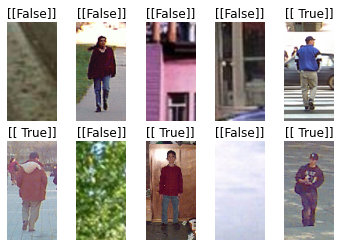
从上图,可以看见,经过bootstrapping SVM依据HOG特征检测行人的成功率 还是挺高的,这里没有交叉验证了.
在这之后,我们需要把SVM的分类过程和检测过程连接起来,达到在图片中检测行人的目的,实现这个过程的方法是对图像中每个可能的块进行重复分类
把图像分成块,再把每个块分类为包含行人或者不包含行人。
优化的话,可以采用IOU算法,优化这一个过程
步骤:(以下为引用文献:)
1.循环遍历一张图像中的所有可能的块,如下所示,每次通过少数stride像素移动感兴趣区域:
2.不超出图像的边界:
3.裁剪出感兴趣区域,进行预处理,并进行分类
4.如果特定的图像块刚好被分类为一个行人,那么我们就把这个图像块添加到成功的列表里
5.因为行人不但出现在不同的位置,而且大小也是各不相同,我们必须重新调整图像大小并重复整个过程。OpenCV提供了一个方便的函数,以detectMultiScale函数的形式执行这个多尺度检测任务。这有点麻烦,但是我们可以把SVM的所有参数都传递给hog对象
6.然后就可以调用检测函数了
7.在实践中,人们在面对一个标准任务(如行人检测)时,常常依赖于OpenCV中内置的预扫描SVM分类器。通过加载cv2.HOGDescriptor_getDaimlerPeopleDetector()或者cv2.HOGDescriptor_getDefaultPeopleDetector()
"""最后一步"""
file = "data/chapter6/pedestrian_test.jpg "
img_test = cv2.imread(file)
img_test = cv2.cvtColor(img_test, cv2.COLOR_BGR2RGB)
stride = 20
found = []
cut_img = []
for y_start in np.arange(0,img_test.shape[0],stride):
for x_start in np.arange(0,img_test.shape[1],stride):
if y_start+128 > img_test.shape[0]:
continue
if x_start + 64 > img_test.shape[1]:
continue
cutting = img_test[y_start:y_start+128,
x_start: x_start + 64]
cut_img.append(cutting)
cut_Hog = Hog.compute(cutting,(64,64))
cut_Hog.shape
cut_Hog = cut_Hog.reshape((1,1980))
_,y_pred = SVM_best.predict(cut_Hog)
y_pred = np.squeeze(y_pred)
if y_pred == 1:
found.append((y_start,x_start,128,64))
cut_img,found = np.array(cut_img),np.array(found)
cut_img.shape,found.shape
((70, 128, 64, 3), (5, 4))
found,found.shape
import matplotlib.patches as patches
'''显示由上述代码获得的图片'''
for i in range(found.shape[0]):
plt.subplot(2,5,i+1)
y_start,x_start =found[i,0],found[i, 1]
found_img = img_test[y_start:y_start+128,x_start: x_start + 64]
plt.imshow(found_img,cmap='gray')
plt.axis('off')

"""在原始图片中裱框"""
fig,ax = plt.subplots(1)
ax.imshow(img_test,cmap='gray')
for i in range(found.shape[0]):
rect = patches.Rectangle((found[i,1],found[i,0]),64,128,linewidth=1,edgecolor='r',facecolor='none')
ax.add_patch(rect)
plt.show()

由于行人不但出现在不同位置,而且在图片中的大小也不一致,导致很难检测到行人,只能说传统的机器学习,
需要手动的去调整函数的参数,实测鲁棒性,相当差。。。需要不断的运行才能得到一个稍微能看的结果
使用opencv的detectMultiScale 执行多尺度目标检测
'''直接调用opencv封装好的 的函数 效果等同于上面一堆代码,,,,'''
hogdef = cv2.HOGDescriptor()
pdetect = cv2.HOGDescriptor_getDefaultPeopleDetector()
hogdef.setSVMDetector(pdetect)
found_img,_ = hogdef.detectMultiScale(img_test)
fig = plt.figure()
ax = fig.add_subplot(111)
ax.imshow(img_test)
for f in found_img:
ax.add_patch(patches.Rectangle((f[0],f[1]),f[2],f[3],color ="red",linewidth=1,fill=False))

可优化的地方:
第一点:SVM我们这里使用的默认的RBF核函数,可能不是最优的SVM
第二点:各个超参数,并没有去测试到底那个数值更好
第三点:其实可以可视化数据来查看用哪个最优边界策略更好
第四点:HOG特征与其他的特征相比是否足够好
第五点,数据集的图片并没有旋转,倒置等操作,鲁棒性差
bug:
TypeError: HOGDescriptor() takes at most 1 argument (2 given)
原因:opencv是基于c++/c开发的
cv::Size是一个contains two integers的类。在pythonapi中,它表示为包含两个整数的元组。在
因此,要在Python中调用此重载,只能输入元组与整数值,无法输入关键字例如
hog = cv2.HOGDescriptor(winSize = (32,32),nbins = 1)
元组:_winSize,_blockSize,_blockStride,和_cellSize 1x一个整数(对于_nbins)
TypeError: only size-1 arrays can be converted to Python scalars
切片有误,一维数据还切 错误示范y[sd,:] ,解决办法.y[sd]
error: OpenCV(3.4.2) C:\Miniconda3\conda-bld\opencv-suite_1534379934306\work\modules\ml\src\svm.cpp:2010: error: (-215:Assertion failed) samples.cols == var_count && samples.type() == 5 in function ‘cv::ml::SVMImpl::predict’
原因:这意味着该样品或者不具有列的权数或不具有类型CV_32F.
error: (-215:Assertion failed) img.type() == 0 || img.type() == (((0) & ((1 << 3) – 1)) + (((3)-1) << 3)) in function ‘cv::HOGDescriptor::computeGradient
原因分析:将灰度图类型设置为了float32,所以发生了错误,或者是数据违反了第一个条件。为了应用svm,数据需要是一个向量,即1 x n矩阵。
其他文章
Sober算子边缘检测与Harris角点检测1
决策树的实现与可视化
主成分分析,独立成分分析,+t-SNE 分布随机可视化降维的对比
线性回归预测波士顿房价
基于逻辑回归的鸢尾花分类
数据表示和特征工程参考文献
Hog特征 百度百科
图片的相似度,矩阵相似度
机器学习 使用OpenCV、Python和scikit-learn进行智能图像处理(原书第2版)-(elib.cc) by (印)阿迪蒂亚·夏尔马(Aditya Sharma)(印)维什韦什·拉维·什里马利(Vishwesh Ravi Shrimali)(美)迈克尔·贝耶勒(Michael Beyeler)Original: https://blog.csdn.net/weixin_43005832/article/details/123475858
Author: 林丿子轩
Title: HOG特征+SVM 进行行人检测,bootstrapping SVM调优。带源码,分析步骤,异常处理分析。
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/702151/
转载文章受原作者版权保护。转载请注明原作者出处!