

本文来自公众号:机器人视觉
完成双目相机标定以后,获得双目相机的参数矩阵
包括左右相机的内参数矩阵、左右相机的畸变系数矩阵、右相机相对于左相机的旋转矩阵与平移矩阵
已知左右相机图像中的对应点坐标,获取目标在双目视觉传感器下三维坐标的流程如下:
1、将双目相机标定参数整理如下:
//左相机内参数矩阵
float leftIntrinsic[3][3] = { 3061.6936, -0.8869, 641.3042,
0, 3058.8751, 508.9555,
0, 0, 1 };
//左相机畸变系数
float leftDistortion[1][5] = { -0.0133, 0.6503, 0.0029, -0.0049, -16.8704 };
//左相机旋转矩阵
float leftRotation[3][3] = { 1, 0, 0,
0, 1, 0,
0, 0, 1 };
//左相机平移向量
float leftTranslation[1][3] = { 0, 0, 0 };
//右相机内参数矩阵
float rightIntrinsic[3][3] = { 3069.2482, -0.8951, 620.5357,
0, 3069.2450, 532.7122,
0, 0, 1 };
//右相机畸变系数
float rightDistortion[1][5] = { -0.0593, 3.4501, 0.0003, -8.5614, -58.3116 };
//右相机旋转矩阵
float rightRotation[3][3] = { 0.9989, 0.0131, -0.0439,
-0.0121, 0.9996, 0.0233,
0.0441, -0.0228, 0.9987};
//右相机平移向量
float rightTranslation[1][3] = {-73.8389, 2.6712, 3.3792};
2、二维像素坐标与相机坐标系下三维坐标转换
//************************************
// Description: 根据左右相机中成像坐标求解空间坐标
// Method: uv2xyz
// FullName: uv2xyz
// Parameter: Point2f uvLeft
// Parameter: Point2f uvRight
// Returns: cv::Point3f
//************************************
Point3f uv2xyz(Point2f uvLeft, Point2f uvRight)
{
// [u1] |X| [u2] |X|
//Z*|v1| = Ml*|Y| Z*|v2| = Mr*|Y|
// [ 1] |Z| [ 1] |Z|
// |1| |1|
Mat mLeftRotation = Mat(3, 3, CV_32F, leftRotation);
Mat mLeftTranslation = Mat(3, 1, CV_32F, leftTranslation);
Mat mLeftRT = Mat(3, 4, CV_32F);//左相机M矩阵
hconcat(mLeftRotation, mLeftTranslation, mLeftRT);
Mat mLeftIntrinsic = Mat(3, 3, CV_32F, leftIntrinsic);
Mat mLeftM = mLeftIntrinsic * mLeftRT;
//cout<<"左相机m矩阵 = "<<endl<<mleftm<<endl; mat mrightrotation="Mat(3," 3, cv_32f, rightrotation); mrighttranslation="Mat(3," 1, righttranslation); mrightrt="Mat(3," 4, cv_32f); 右相机m矩阵 hconcat(mrightrotation, mrighttranslation, mrightrt); mrightintrinsic="Mat(3," rightintrinsic); mrightm="mRightIntrinsic" * mrightrt; cout<<"右相机m矩阵="<<endl<<mRightM<<endl;
//最小二乘法A矩阵
Mat A = Mat(4, 3, CV_32F);
A.at<float>(0, 0) = uvLeft.x * mLeftM.at<float>(2, 0) - mLeftM.at<float>(0, 0);
A.at<float>(0, 1) = uvLeft.x * mLeftM.at<float>(2, 1) - mLeftM.at<float>(0, 1);
A.at<float>(0, 2) = uvLeft.x * mLeftM.at<float>(2, 2) - mLeftM.at<float>(0, 2);
A.at<float>(1, 0) = uvLeft.y * mLeftM.at<float>(2, 0) - mLeftM.at<float>(1, 0);
A.at<float>(1, 1) = uvLeft.y * mLeftM.at<float>(2, 1) - mLeftM.at<float>(1, 1);
A.at<float>(1, 2) = uvLeft.y * mLeftM.at<float>(2, 2) - mLeftM.at<float>(1, 2);
A.at<float>(2, 0) = uvRight.x * mRightM.at<float>(2, 0) - mRightM.at<float>(0, 0);
A.at<float>(2, 1) = uvRight.x * mRightM.at<float>(2, 1) - mRightM.at<float>(0, 1);
A.at<float>(2, 2) = uvRight.x * mRightM.at<float>(2, 2) - mRightM.at<float>(0, 2);
A.at<float>(3, 0) = uvRight.y * mRightM.at<float>(2, 0) - mRightM.at<float>(1, 0);
A.at<float>(3, 1) = uvRight.y * mRightM.at<float>(2, 1) - mRightM.at<float>(1, 1);
A.at<float>(3, 2) = uvRight.y * mRightM.at<float>(2, 2) - mRightM.at<float>(1, 2);
//最小二乘法B矩阵
Mat B = Mat(4, 1, CV_32F);
B.at<float>(0, 0) = mLeftM.at<float>(0, 3) - uvLeft.x * mLeftM.at<float>(2, 3);
B.at<float>(1, 0) = mLeftM.at<float>(1, 3) - uvLeft.y * mLeftM.at<float>(2, 3);
B.at<float>(2, 0) = mRightM.at<float>(0, 3) - uvRight.x * mRightM.at<float>(2, 3);
B.at<float>(3, 0) = mRightM.at<float>(1, 3) - uvRight.y * mRightM.at<float>(2, 3);
Mat XYZ = Mat(3, 1, CV_32F);
//采用SVD最小二乘法求解XYZ
solve(A, B, XYZ, DECOMP_SVD);
//cout<<" 空间坐标为="<<endl<<XYZ<<endl;
//世界坐标系中坐标
Point3f world;
world.x = XYZ.at<float>(0, 0);
world.y = XYZ.at<float>(1, 0);
world.z = XYZ.at<float>(2, 0);
return world;
}
//************************************
// Description: 将世界坐标系中的点投影到左右相机成像坐标系中
// Method: xyz2uv
// FullName: xyz2uv
// Parameter: Point3f worldPoint
// Parameter: float intrinsic[3][3]
// Parameter: float translation[1][3]
// Parameter: float rotation[3][3]
// Returns: cv::Point2f
//************************************
Point2f xyz2uv(Point3f worldPoint, float intrinsic[3][3], float translation[1][3], float rotation[3][3])
{
// [fx s x0] [Xc] [Xw] [u] 1 [Xc]
//K = |0 fy y0| TEMP = [R T] |Yc| = TEMP*|Yw| | | = —*K *|Yc|
// [ 0 0 1 ] [Zc] |Zw| [v] Zc [Zc]
// [1 ]
Point3f c;
c.x = rotation[0][0] * worldPoint.x + rotation[0][1] * worldPoint.y + rotation[0][2] * worldPoint.z + translation[0][0] * 1;
c.y = rotation[1][0] * worldPoint.x + rotation[1][1] * worldPoint.y + rotation[1][2] * worldPoint.z + translation[0][1] * 1;
c.z = rotation[2][0] * worldPoint.x + rotation[2][1] * worldPoint.y + rotation[2][2] * worldPoint.z + translation[0][2] * 1;
Point2f uv;
uv.x = (intrinsic[0][0] * c.x + intrinsic[0][1] * c.y + intrinsic[0][2] * c.z) / c.z;
uv.y = (intrinsic[1][0] * c.x + intrinsic[1][1] * c.y + intrinsic[1][2] * c.z) / c.z;
return uv;
}
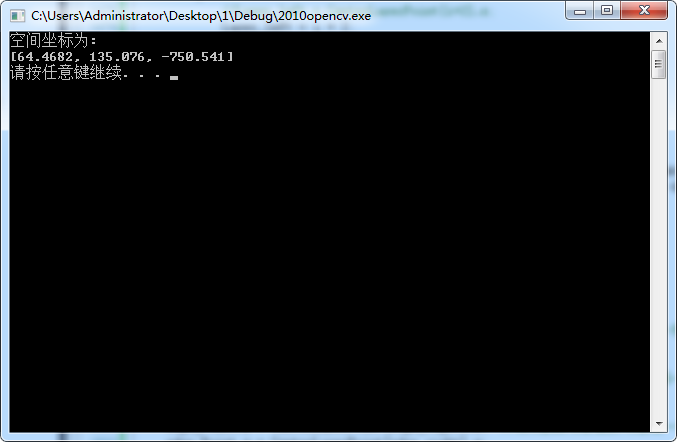
</code></pre><p>3、由像素坐标获取三维坐标</p><pre><code> Point2f l = (638, 393);
Point2f r = (85, 502);
Point3f worldPoint;
worldPoint = uv2xyz(l, r);
cout << " 空间坐标为:" << endl uv2xyz(l, r) endl; < code></"左相机m矩阵>

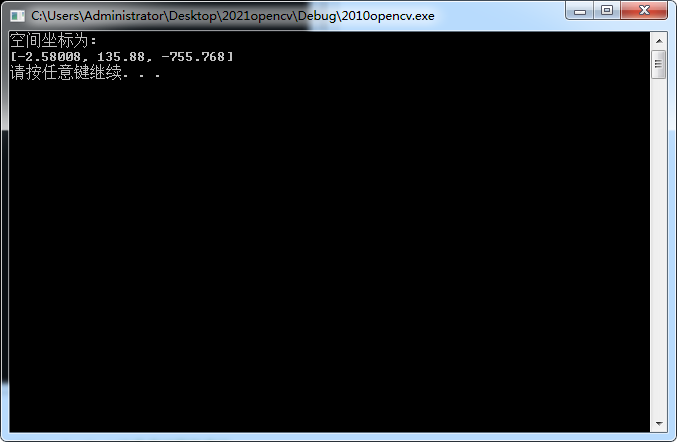
更换点对测试
Point2f l = (857, 666);
Point2f r = (303, 775);
//Point2f l = (1014, 445);
//Point2f r = (523, 387);
Point3f worldPoint;
worldPoint = uv2xyz(l, r);
cout << "空间坐标为:" << endl << uv2xyz(l, r) << endl;
system("pause");
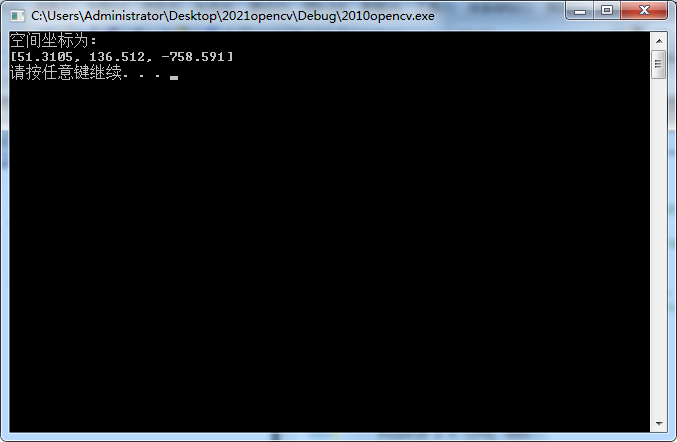
更换点对测试:
Point2f l = (931, 449);
Point2f r = (370, 555);
Point3f worldPoint;
worldPoint = uv2xyz(l, r);
cout << "空间坐标为:" << endl << uv2xyz(l, r) << endl;
system("pause");
线结构光传感器标定(相机标定+结构光标定)完整流程(一)
https://blog.csdn.net/qq_27353621/article/details/120787942
UR机器人手眼标定(二)
https://blog.csdn.net/qq_27353621/article/details/121603215
双目相机标定(三)
https://blog.csdn.net/qq_27353621/article/details/121031972
公众号:机器人视觉
Original: https://blog.csdn.net/qq_27353621/article/details/121744002
Author: 马少爷
Title: 双目相机下目标三维坐标计算(四)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/701276/
转载文章受原作者版权保护。转载请注明原作者出处!