

文章目录
*
– 普通卷积和分组卷积
– 普通卷积和深度可分离卷积
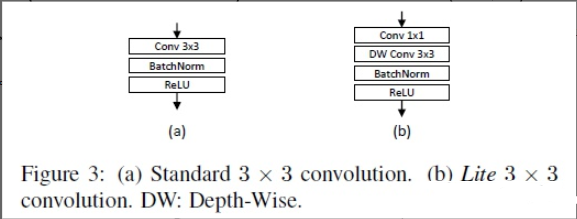
– 用深度可分离卷积(LightConv3x3)代替普通卷积(Conv3x3)减少参数
– OSBlock (bottleneck)
– OSNet
OSNet之所以轻量(2.2M)在于 网络浅,使用 深度可分离卷积代替传统卷积,但是很有效
普通卷积和分组卷积
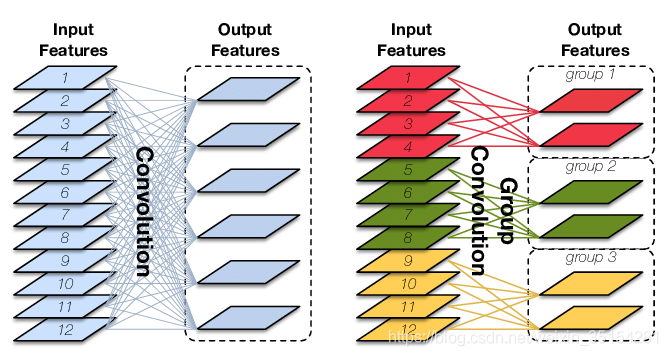

所谓分组卷积,就是右图的input features分成一组一组,如上图groups=3,那么输入的特征分成3组,每组有12/3=4的通道的特征参与输出。然后根据输出通道的维度,得到每组的输入特征要计算两次(6/3=2)。也就是说groups要能被输入通道和输出通道整除,否则报错。
网络参数:
全卷积:12x k x k x 6
分组卷积:(4 x k x k x 2)x3, 是全卷积的1/g
conv1 = nn.Conv2d(12, 7, 1, stride=1, padding=0, bias=False,groups=3)
conv1 = nn.Conv2d(12, 7, 1, stride=1, padding=0, bias=False,groups=1)
普通卷积和深度可分离卷积
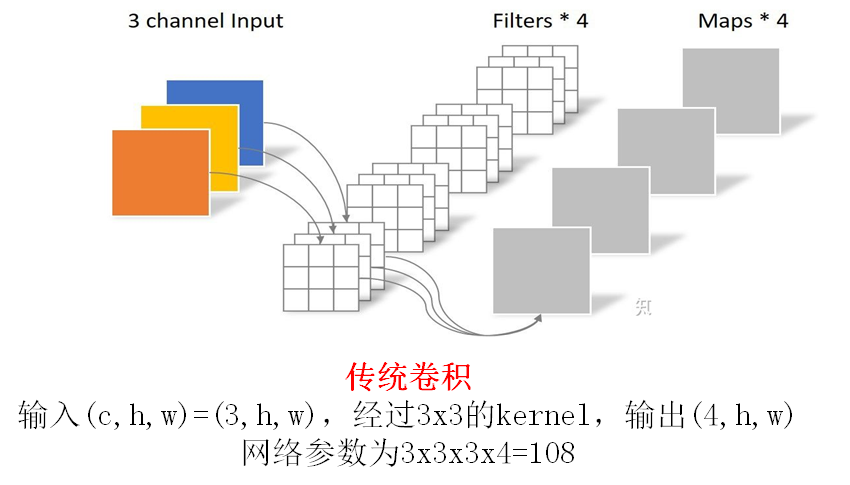
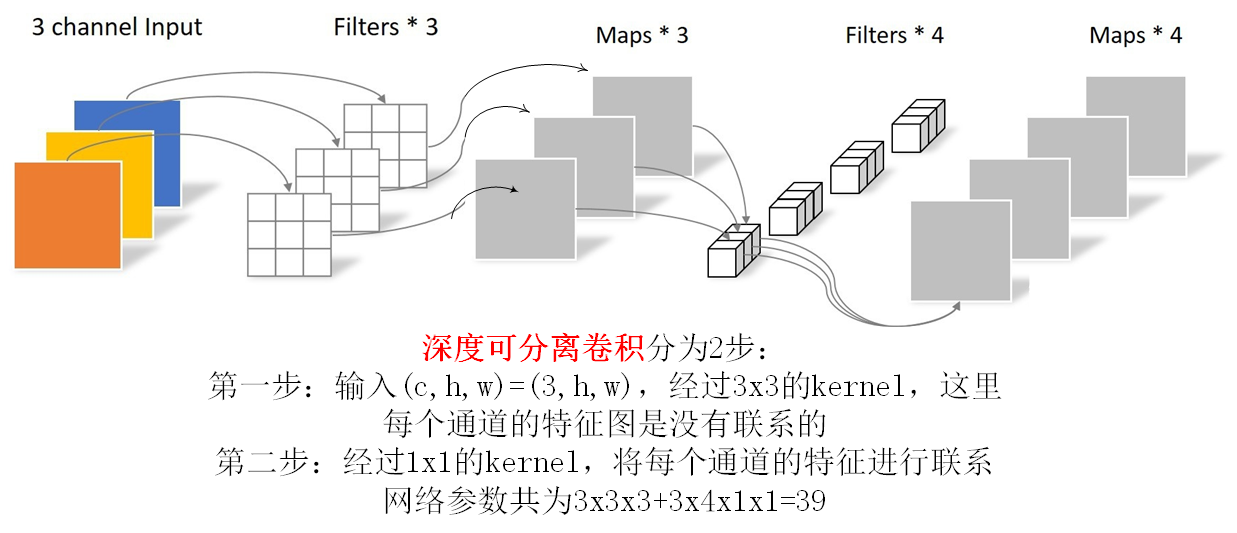
; 用深度可分离卷积(LightConv3x3)代替普通卷积(Conv3x3)减少参数
class Conv3x3(nn.Module):
"""3x3 convolution + bn + relu."""
def __init__(self, in_channels, out_channels, stride=1, groups=1):
super(Conv3x3, self).__init__()
self.conv = nn.Conv2d(
in_channels,
out_channels,
3,
stride=stride,
padding=1,
bias=False,
groups=groups
)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
class LightConv3x3(nn.Module):
"""Lightweight 3x3 convolution.
1x1 (linear) + dw 3x3 (nonlinear).
"""
def __init__(self, in_channels, out_channels):
super(LightConv3x3, self).__init__()
self.conv1 = nn.Conv2d(
in_channels, out_channels, 1, stride=1, padding=0, bias=False
)
self.conv2 = nn.Conv2d(
out_channels,
out_channels,
3,
stride=1,
padding=1,
bias=False,
groups=out_channels
)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.bn(x)
x = self.relu(x)
return x
if __name__ == '__main__':
x=torch.Tensor(1,64,64,32)
mode1 = LightConv3x3(64,256)
mode1(x)
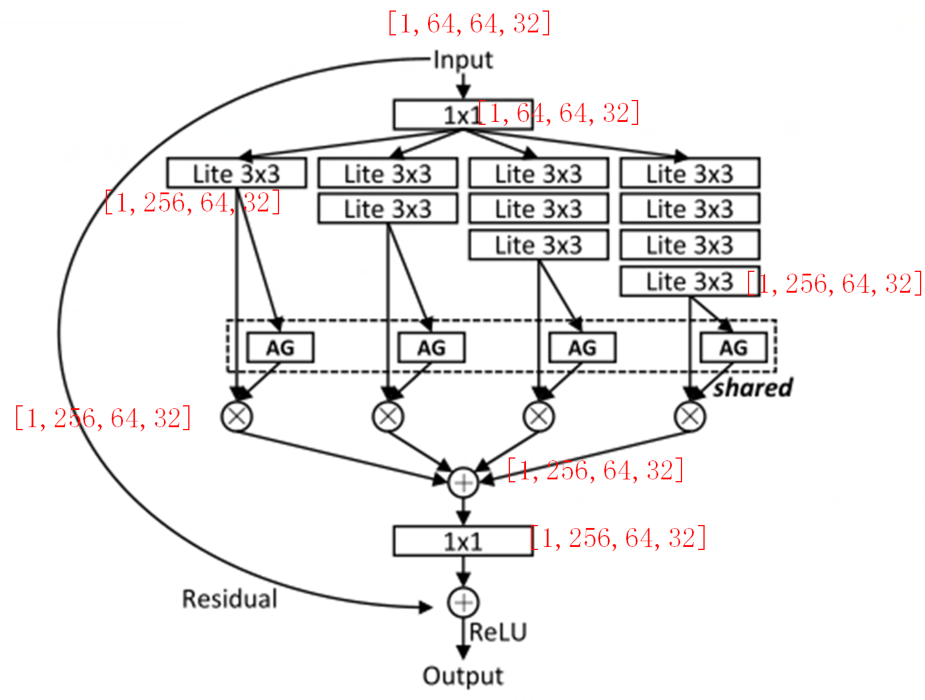
OSBlock (bottleneck)
- 主要由多个轻量的3×3卷积,和AG组成,AG就是一个通道注意力,然后他们4个分支共享这个注意力网络
- bottleneck只用来调整输入输出通道,图像大小没变
class OSBlock(nn.Module):
"""Omni-scale feature learning block."""
def __init__(
self,
in_channels,
out_channels,
IN=False,
bottleneck_reduction=4,
**kwargs
):
super(OSBlock, self).__init__()
mid_channels = out_channels // bottleneck_reduction
self.conv1 = Conv1x1(in_channels, mid_channels)
self.conv2a = LightConv3x3(mid_channels, mid_channels)
self.conv2b = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.conv2c = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.conv2d = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.gate = ChannelGate(mid_channels)
self.conv3 = Conv1x1Linear(mid_channels, out_channels)
self.downsample = None
if in_channels != out_channels:
self.downsample = Conv1x1Linear(in_channels, out_channels)
self.IN = None
if IN:
self.IN = nn.InstanceNorm2d(out_channels, affine=True)
def forward(self, x):
identity = x
x1 = self.conv1(x)
x2a = self.conv2a(x1)
x2b = self.conv2b(x1)
x2c = self.conv2c(x1)
x2d = self.conv2d(x1)
x2 = self.gate(x2a) + self.gate(x2b) + self.gate(x2c) + self.gate(x2d)
x3 = self.conv3(x2)
if self.downsample is not None:
identity = self.downsample(identity)
out = x3 + identity
if self.IN is not None:
out = self.IN(out)
return F.relu(out)
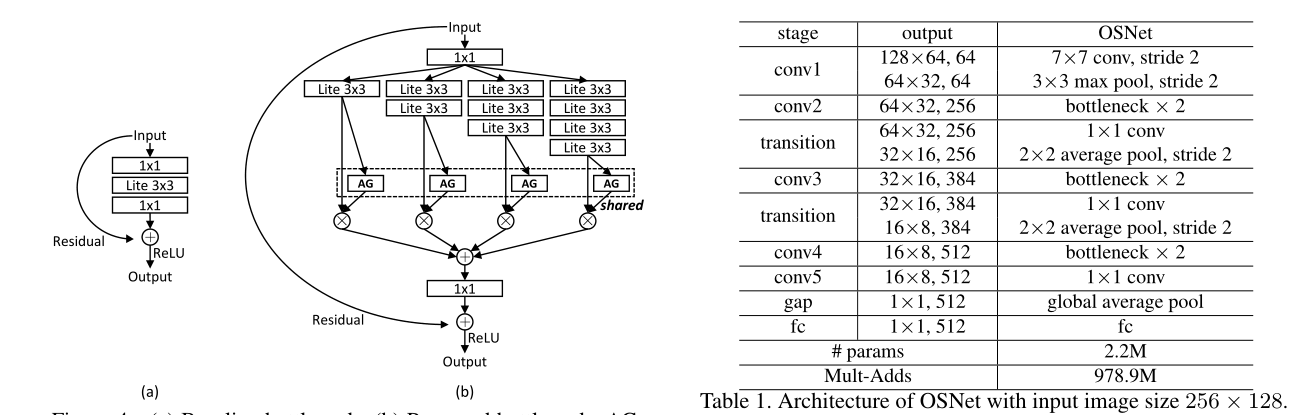
OSNet
- 左图就是bottleneck,注意右图中conv2,3,4,5只负责通道上的变化,transition负责图像大小的变化
- OSnet一共有5层[conv1], [conv2,transition], [conv3,transition], conv4, conv5
- conv的生成函数和相应的含义
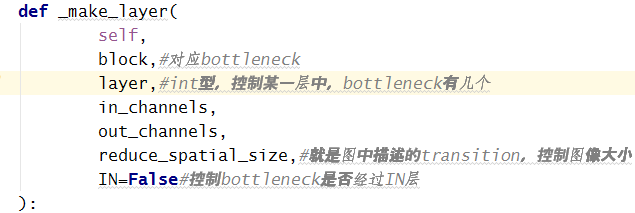
- OSNet的调用说明
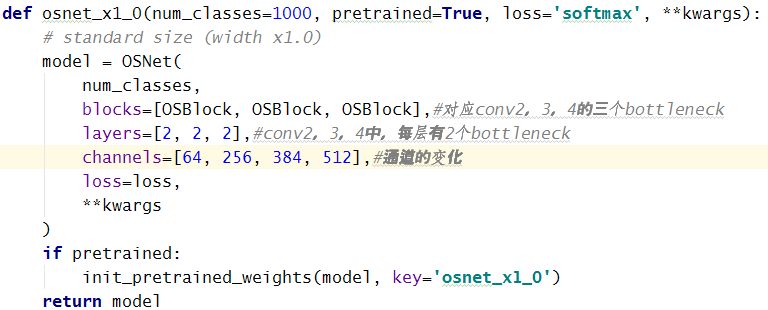
全部代码
from __future__ import division, absolute_import
import warnings
import torch
from torch import nn
from torch.nn import functional as F
__all__ = [
'osnet_x1_0', 'osnet_x0_75', 'osnet_x0_5', 'osnet_x0_25', 'osnet_ibn_x1_0'
]
pretrained_urls = {
'osnet_x1_0':
'https://drive.google.com/uc?id=1LaG1EJpHrxdAxKnSCJ_i0u-nbxSAeiFY',
'osnet_x0_75':
'https://drive.google.com/uc?id=1uwA9fElHOk3ZogwbeY5GkLI6QPTX70Hq',
'osnet_x0_5':
'https://drive.google.com/uc?id=16DGLbZukvVYgINws8u8deSaOqjybZ83i',
'osnet_x0_25':
'https://drive.google.com/uc?id=1rb8UN5ZzPKRc_xvtHlyDh-cSz88YX9hs',
'osnet_ibn_x1_0':
'https://drive.google.com/uc?id=1sr90V6irlYYDd4_4ISU2iruoRG8J__6l'
}
class ConvLayer(nn.Module):
"""Convolution layer (conv + bn + relu)."""
def __init__(
self,
in_channels,
out_channels,
kernel_size,
stride=1,
padding=0,
groups=1,
IN=False
):
super(ConvLayer, self).__init__()
self.conv = nn.Conv2d(
in_channels,
out_channels,
kernel_size,
stride=stride,
padding=padding,
bias=False,
groups=groups
)
if IN:
self.bn = nn.InstanceNorm2d(out_channels, affine=True)
else:
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
class Conv1x1(nn.Module):
"""1x1 convolution + bn + relu."""
def __init__(self, in_channels, out_channels, stride=1, groups=1):
super(Conv1x1, self).__init__()
self.conv = nn.Conv2d(
in_channels,
out_channels,
1,
stride=stride,
padding=0,
bias=False,
groups=groups
)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
class Conv1x1Linear(nn.Module):
"""1x1 convolution + bn (w/o non-linearity)."""
def __init__(self, in_channels, out_channels, stride=1):
super(Conv1x1Linear, self).__init__()
self.conv = nn.Conv2d(
in_channels, out_channels, 1, stride=stride, padding=0, bias=False
)
self.bn = nn.BatchNorm2d(out_channels)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return x
class Conv3x3(nn.Module):
"""3x3 convolution + bn + relu."""
def __init__(self, in_channels, out_channels, stride=1, groups=1):
super(Conv3x3, self).__init__()
self.conv = nn.Conv2d(
in_channels,
out_channels,
3,
stride=stride,
padding=1,
bias=False,
groups=groups
)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.relu(x)
return x
class LightConv3x3(nn.Module):
"""Lightweight 3x3 convolution.
1x1 (linear) + dw 3x3 (nonlinear).
"""
def __init__(self, in_channels, out_channels):
super(LightConv3x3, self).__init__()
self.conv1 = nn.Conv2d(
in_channels, out_channels, 1, stride=1, padding=0, bias=False
)
self.conv2 = nn.Conv2d(
out_channels,
out_channels,
3,
stride=1,
padding=1,
bias=False,
groups=out_channels
)
self.bn = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.bn(x)
x = self.relu(x)
return x
if __name__ == '__main__':
x=torch.Tensor(1,64,64,32)
mode1 = LightConv3x3(64,256)
mode1(x)
class ChannelGate(nn.Module):
"""A mini-network that generates channel-wise gates conditioned on input tensor."""
def __init__(
self,
in_channels,
num_gates=None,
return_gates=False,
gate_activation='sigmoid',
reduction=16,
layer_norm=False
):
super(ChannelGate, self).__init__()
if num_gates is None:
num_gates = in_channels
self.return_gates = return_gates
self.global_avgpool = nn.AdaptiveAvgPool2d(1)
self.fc1 = nn.Conv2d(
in_channels,
in_channels // reduction,
kernel_size=1,
bias=True,
padding=0
)
self.norm1 = None
if layer_norm:
self.norm1 = nn.LayerNorm((in_channels // reduction, 1, 1))
self.relu = nn.ReLU(inplace=True)
self.fc2 = nn.Conv2d(
in_channels // reduction,
num_gates,
kernel_size=1,
bias=True,
padding=0
)
if gate_activation == 'sigmoid':
self.gate_activation = nn.Sigmoid()
elif gate_activation == 'relu':
self.gate_activation = nn.ReLU(inplace=True)
elif gate_activation == 'linear':
self.gate_activation = None
else:
raise RuntimeError(
"Unknown gate activation: {}".format(gate_activation)
)
def forward(self, x):
input = x
x = self.global_avgpool(x)
x = self.fc1(x)
if self.norm1 is not None:
x = self.norm1(x)
x = self.relu(x)
x = self.fc2(x)
if self.gate_activation is not None:
x = self.gate_activation(x)
if self.return_gates:
return x
return input * x
class OSBlock(nn.Module):
"""Omni-scale feature learning block."""
def __init__(
self,
in_channels,
out_channels,
IN=False,
bottleneck_reduction=4,
**kwargs
):
super(OSBlock, self).__init__()
mid_channels = out_channels // bottleneck_reduction
self.conv1 = Conv1x1(in_channels, mid_channels)
self.conv2a = LightConv3x3(mid_channels, mid_channels)
self.conv2b = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.conv2c = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.conv2d = nn.Sequential(
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
LightConv3x3(mid_channels, mid_channels),
)
self.gate = ChannelGate(mid_channels)
self.conv3 = Conv1x1Linear(mid_channels, out_channels)
self.downsample = None
if in_channels != out_channels:
self.downsample = Conv1x1Linear(in_channels, out_channels)
self.IN = None
if IN:
self.IN = nn.InstanceNorm2d(out_channels, affine=True)
def forward(self, x):
identity = x
x1 = self.conv1(x)
x2a = self.conv2a(x1)
x2b = self.conv2b(x1)
x2c = self.conv2c(x1)
x2d = self.conv2d(x1)
x2 = self.gate(x2a) + self.gate(x2b) + self.gate(x2c) + self.gate(x2d)
x3 = self.conv3(x2)
if self.downsample is not None:
identity = self.downsample(identity)
out = x3 + identity
if self.IN is not None:
out = self.IN(out)
return F.relu(out)
class OSNet(nn.Module):
"""Omni-Scale Network.
Reference:
- Zhou et al. Omni-Scale Feature Learning for Person Re-Identification. ICCV, 2019.
- Zhou et al. Learning Generalisable Omni-Scale Representations
for Person Re-Identification. TPAMI, 2021.
"""
def __init__(
self,
num_classes,
blocks,
layers,
channels,
feature_dim=512,
loss='softmax',
IN=False,
**kwargs
):
super(OSNet, self).__init__()
num_blocks = len(blocks)
assert num_blocks == len(layers)
assert num_blocks == len(channels) - 1
self.loss = loss
self.feature_dim = feature_dim
self.conv1 = ConvLayer(3, channels[0], 7, stride=2, padding=3, IN=IN)
self.maxpool = nn.MaxPool2d(3, stride=2, padding=1)
self.conv2 = self._make_layer(
blocks[0],
layers[0],
channels[0],
channels[1],
reduce_spatial_size=True,
IN=IN
)
self.conv3 = self._make_layer(
blocks[1],
layers[1],
channels[1],
channels[2],
reduce_spatial_size=True
)
self.conv4 = self._make_layer(
blocks[2],
layers[2],
channels[2],
channels[3],
reduce_spatial_size=False
)
self.conv5 = Conv1x1(channels[3], channels[3])
self.global_avgpool = nn.AdaptiveAvgPool2d(1)
self.fc = self._construct_fc_layer(
self.feature_dim, channels[3], dropout_p=None
)
self.classifier = nn.Linear(self.feature_dim, num_classes)
self._init_params()
def _make_layer(
self,
block,
layer,
in_channels,
out_channels,
reduce_spatial_size,
IN=False
):
layers = []
layers.append(block(in_channels, out_channels, IN=IN))
for i in range(1, layer):
layers.append(block(out_channels, out_channels, IN=IN))
if reduce_spatial_size:
layers.append(
nn.Sequential(
Conv1x1(out_channels, out_channels),
nn.AvgPool2d(2, stride=2)
)
)
return nn.Sequential(*layers)
def _construct_fc_layer(self, fc_dims, input_dim, dropout_p=None):
if fc_dims is None or fc_dims < 0:
self.feature_dim = input_dim
return None
if isinstance(fc_dims, int):
fc_dims = [fc_dims]
layers = []
for dim in fc_dims:
layers.append(nn.Linear(input_dim, dim))
layers.append(nn.BatchNorm1d(dim))
layers.append(nn.ReLU(inplace=True))
if dropout_p is not None:
layers.append(nn.Dropout(p=dropout_p))
input_dim = dim
self.feature_dim = fc_dims[-1]
return nn.Sequential(*layers)
def _init_params(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(
m.weight, mode='fan_out', nonlinearity='relu'
)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.BatchNorm1d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
if m.bias is not None:
nn.init.constant_(m.bias, 0)
def featuremaps(self, x):
x = self.conv1(x)
x = self.maxpool(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.conv4(x)
x = self.conv5(x)
return x
def forward(self, x, return_featuremaps=False):
x = self.featuremaps(x)
if return_featuremaps:
return x
v = self.global_avgpool(x)
v = v.view(v.size(0), -1)
if self.fc is not None:
v = self.fc(v)
if not self.training:
return v
y = self.classifier(v)
if self.loss == 'softmax':
return y
elif self.loss == 'triplet':
return y, v
else:
raise KeyError("Unsupported loss: {}".format(self.loss))
def init_pretrained_weights(model, key=''):
"""Initializes model with pretrained weights.
Layers that don't match with pretrained layers in name or size are kept unchanged.
"""
import os
import errno
import gdown
from collections import OrderedDict
def _get_torch_home():
ENV_TORCH_HOME = 'TORCH_HOME'
ENV_XDG_CACHE_HOME = 'XDG_CACHE_HOME'
DEFAULT_CACHE_DIR = '~/.cache'
torch_home = os.path.expanduser(
os.getenv(
ENV_TORCH_HOME,
os.path.join(
os.getenv(ENV_XDG_CACHE_HOME, DEFAULT_CACHE_DIR), 'torch'
)
)
)
return torch_home
torch_home = _get_torch_home()
model_dir = os.path.join(torch_home, 'checkpoints')
try:
os.makedirs(model_dir)
except OSError as e:
if e.errno == errno.EEXIST:
pass
else:
raise
filename = key + '_imagenet.pth'
cached_file = os.path.join(model_dir, filename)
if not os.path.exists(cached_file):
gdown.download(pretrained_urls[key], cached_file, quiet=False)
state_dict = torch.load(cached_file)
model_dict = model.state_dict()
new_state_dict = OrderedDict()
matched_layers, discarded_layers = [], []
for k, v in state_dict.items():
if k.startswith('module.'):
k = k[7:]
if k in model_dict and model_dict[k].size() == v.size():
new_state_dict[k] = v
matched_layers.append(k)
else:
discarded_layers.append(k)
model_dict.update(new_state_dict)
model.load_state_dict(model_dict)
if len(matched_layers) == 0:
warnings.warn(
'The pretrained weights from "{}" cannot be loaded, '
'please check the key names manually '
'(** ignored and continue **)'.format(cached_file)
)
else:
print(
'Successfully loaded imagenet pretrained weights from "{}"'.
format(cached_file)
)
if len(discarded_layers) > 0:
print(
'** The following layers are discarded '
'due to unmatched keys or layer size: {}'.
format(discarded_layers)
)
def osnet_x1_0(num_classes=1000, pretrained=True, loss='softmax', **kwargs):
model = OSNet(
num_classes,
blocks=[OSBlock, OSBlock, OSBlock],
layers=[2, 2, 2],
channels=[64, 256, 384, 512],
loss=loss,
**kwargs
)
if pretrained:
init_pretrained_weights(model, key='osnet_x1_0')
return model
def osnet_x0_75(num_classes=1000, pretrained=True, loss='softmax', **kwargs):
model = OSNet(
num_classes,
blocks=[OSBlock, OSBlock, OSBlock],
layers=[2, 2, 2],
channels=[48, 192, 288, 384],
loss=loss,
**kwargs
)
if pretrained:
init_pretrained_weights(model, key='osnet_x0_75')
return model
def osnet_x0_5(num_classes=1000, pretrained=True, loss='softmax', **kwargs):
model = OSNet(
num_classes,
blocks=[OSBlock, OSBlock, OSBlock],
layers=[2, 2, 2],
channels=[32, 128, 192, 256],
loss=loss,
**kwargs
)
if pretrained:
init_pretrained_weights(model, key='osnet_x0_5')
return model
def osnet_x0_25(num_classes=1000, pretrained=True, loss='softmax', **kwargs):
model = OSNet(
num_classes,
blocks=[OSBlock, OSBlock, OSBlock],
layers=[2, 2, 2],
channels=[16, 64, 96, 128],
loss=loss,
**kwargs
)
if pretrained:
init_pretrained_weights(model, key='osnet_x0_25')
return model
def osnet_ibn_x1_0(
num_classes=1000, pretrained=True, loss='softmax', **kwargs
):
model = OSNet(
num_classes,
blocks=[OSBlock, OSBlock, OSBlock],
layers=[2, 2, 2],
channels=[64, 256, 384, 512],
loss=loss,
IN=True,
**kwargs
)
if pretrained:
init_pretrained_weights(model, key='osnet_ibn_x1_0')
return model
Original: https://blog.csdn.net/m0_46204224/article/details/117747658
Author: Mr DaYang
Title: OSNet代码解析(普通卷积,分组卷积,深度可分离卷积,OSblock组成)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/692109/
转载文章受原作者版权保护。转载请注明原作者出处!