

UNet网络实现图像分割
最近在b站上找到一篇UNet网络实现图像分割的教学视频,进行相关学习后决定记录相关知识和自己的理解。
标题首先,分享下教学视频:图像分割UNet硬核讲解(带你手撸unet代码)_哔哩哔哩_bilibili
学习笔记(代码理解加相关知识拓展):
1.UNet网络介绍
不同于CNN网络,UNet网络大致的结构就是:
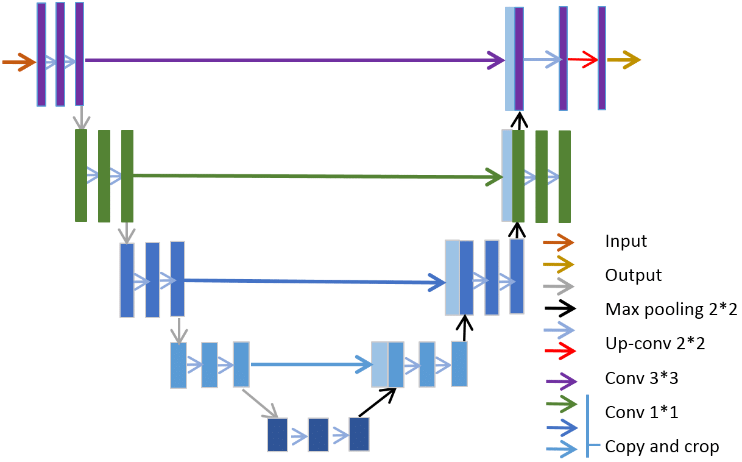

(左边是重复下采样->卷积,右边是重复上采样->卷积)
卷积->下采样->卷积->下采样…->下采样->卷积->上采样->卷积->上采样…->上采样
实现相关参数的解码与编码(左边编码、右边解码)。
; 2.各文件的理解与相关知识点的介绍
(1).data文件
from torch.utils.data import Dataset
import os
from utils import *
from torchvision import transforms
transforms = transforms.Compose(
{
transforms.ToTensor()
}
)
class Mydata(Dataset):
def __init__(self,path):
self.path = path
self.name = os.listdir(os.path.join(path,'SegmentationClass'))
def __len__(self):
return len(self.name)
def __getitem__(self, index):
Segment_name = self.name[index]
Segment_path = os.path.join(self.path,'SegmentationClass',Segment_name)
Image_path = os.path.join(self.path,'JPEGImages',Segment_name.replace('png','jpg'))
Segment_image = keep_image_size_open(Segment_path)
Image = keep_image_size_open(Image_path)
return transforms(Image),transforms(Segment_image)
if __name__ == '__main__':
data = Mydata('F:\Artificial Intelligence\\U_net\data')
print(data[0][0].shape)
print(data[0][1].shape)
(2).utils文件
from PIL import Image
def keep_image_size_open(path,size=(256,256)):
img = Image.open(path)
temp = max(img.size)
mask = Image.new('RGB',(temp,temp),(0,0,0))
mask.paste(img,(0,0))
mask = mask.resize(size)
return mask
'''
取最大的边做mask矩形,并将图片贴到矩形中进行等比缩放,保证图片不会变形
'''
(3).net文件
上、下采样:
这里用图像金字塔进行讲解:
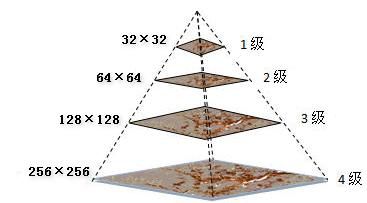
图像金子塔从下往上分辨率不断降低,即像素不断减小,最下层图像尺寸最大,分辨率最高。上一层图像是下一层图像的1/2,反过来下一层图像是上一层图像的2倍(图像的缩放)。
降采样:降采样之后图像大小是原图像MxN的M/2xN/2 ,就是对原图像删除偶数行与列,即得到降采样之后上一层的图片。
-对当前层进行高斯模糊
-删除当前层的偶数行与列
即可得到上一层的图像,这样上一层跟下一层相比,都只有它的1/4大小。
上采样:是与降采样相反,图像放大几乎都是采用内插值方法,即在原有图像像素的基础上在像素点之间采用合适的插值算法插入新的元素。
import torch
from torch import nn
from torch.nn import functional as F
class Conv_Block(nn.Module):
def __init__(self,in_channel,out_channel):
super(Conv_Block, self).__init__()
'''
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True,padding_mode='zeros')
in_channels(int):输入图像的channel(通道数),例如,RGB图像通道数为3
out_channels(int): 输出图像(特征层)的channel
kernel_size(int or tuple):kernel(卷积核)的大小,kennel_size=5,意味着卷积大小(5,5)/5×5,kennel_size=(2,3),意味着卷积大小(2,3)/2×3 ,即非正方形卷积
stride(int or tuple,optional): 卷积的步长,默认为1,stride=2,意味着步长上下左右扫描皆为2, stride=(2,3),左右扫描步长为2、上下为3
padding(int or tuple,optional):四周pad的大小,默认为0,在卷积之前补0,四周都补0,
dilation(int or tuple,optional): kernel元素间的距离,默认为1(dilation翻译为扩张,有时候也称为"空洞"1)
groups(int ,optional):将原始输入channel划分成的组数,默认为1
bias(bool,optional):如果是True,则输出的bias可学,默认为True。卷积后是否加偏移量
padding_mode:默认为"zeros",填充0
'''
self.layer=nn.Sequential(
nn.Conv2d(in_channel,out_channel,3,1,1,padding_mode='reflect',bias=False),
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU(),
nn.Conv2d(out_channel, out_channel, 3, 1, 1, padding_mode='reflect', bias=False),
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class DownSample(nn.Module):
def __init__(self,channel):
super(DownSample, self).__init__()
self.layer=nn.Sequential(
nn.Conv2d(channel,channel,3,2,1,padding_mode='reflect',bias=False),
nn.BatchNorm2d(channel),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class UpSample(nn.Module):
def __init__(self,channel):
super(UpSample, self).__init__()
self.layer=nn.Conv2d(channel,channel//2,1,1)
def forward(self,x,feature_map):
up=F.interpolate(x,scale_factor=2,mode='nearest')
out=self.layer(up)
return torch.cat((out,feature_map),dim=1)
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
self.c1 = Conv_Block(3,64)
self.d1 = DownSample(64)
self.c2 = Conv_Block(64,128)
self.d2 = DownSample(128)
self.c3 = Conv_Block(128,256)
self.d3 = DownSample(256)
self.c4 = Conv_Block(256,512)
self.d4 = DownSample(512)
self.c5 = Conv_Block(512,1024)
self.u1 = UpSample(1024)
self.c6 = Conv_Block(1024,512)
self.u2 = UpSample(512)
self.c7 = Conv_Block(512, 256)
self.u3 = UpSample(256)
self.c8 = Conv_Block(256, 128)
self.u4 = UpSample(128)
self.c9 = Conv_Block(128, 64)
self.out = nn.Conv2d(64,3,3,1,1)
self.Th = nn.Sigmoid()
def forward(self,x):
R1 = self.c1(x)
R2 = self.c2(self.d1(R1))
R3 = self.c3(self.d2(R2))
R4 = self.c4(self.d3(R3))
R5 = self.c5(self.d4(R4))
O1 = self.c6(self.u1(R5,R4))
O2 = self.c7(self.u2(O1, R3))
O3 = self.c8(self.u3(O2, R2))
O4 = self.c9(self.u4(O3, R1))
return self.Th(self.out(O4))
if __name__ == '__main__':
x = torch.randn(2,3,256,256)
"""
torch.randn()返回一个符合均值为0,方差为1的正态分布(标准正态分布)中填充随机数的张量
"""
net = UNet()
print(net(x).shape)
(4).train文件
import os
from torch import nn,optim
import torch
from torch.utils.data import DataLoader
from data import *
from net import *
from torchvision.utils import save_image
device=torch.device('cuda' if torch.cuda.is_available() else 'cpu')
weight_path='params/unet.pth'
data_path=r'F:\Artificial Intelligence\U_net\data'
save_path='train_image'
if __name__ == '__main__':
data_loader=DataLoader(Mydata(data_path),batch_size=2,shuffle=True)
net=UNet().to(device)
if os.path.exists(weight_path):
net.load_state_dict(torch.load(weight_path))
print('successful load weight!')
else:
print('not successful load weight')
opt=optim.Adam(net.parameters())
loss_fun=nn.BCELoss()
epoch=1
while True:
for i,(image,segment_image) in enumerate(data_loader):
image, segment_image=image.to(device),segment_image.to(device)
out_image=net(image)
train_loss=loss_fun(out_image,segment_image)
opt.zero_grad()
train_loss.backward()
opt.step()
if i%5==0:
print(f'{epoch}-{i}-train_loss===>>{train_loss.item()}')
if i%50==0:
torch.save(net.state_dict(),weight_path)
_image=image[0]
_segment_image=segment_image[0]
_out_image=out_image[0]
img=torch.stack([_image,_segment_image,_out_image],dim=0)
save_image(img,f'{save_path}/{i}.png')
epoch+=1
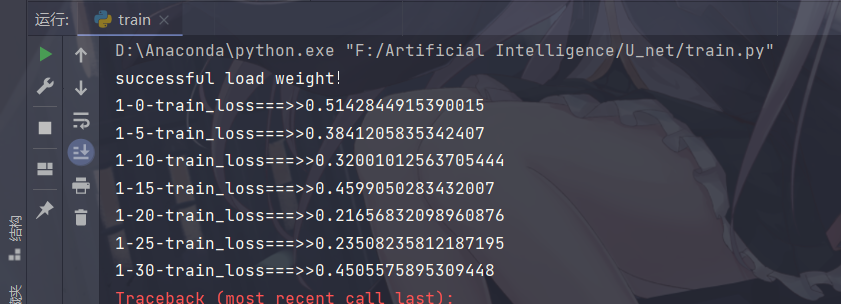
训练函数跟大多数训练函数相同,在此就不多讲解。
在此附上训练效果:

10.7学习笔记
Original: https://blog.csdn.net/qq_52533790/article/details/120643347
Author: 风声向寂
Title: UNet网络实现图像分割
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/688543/
转载文章受原作者版权保护。转载请注明原作者出处!