

1.矩阵键盘vs独立按键
在mcu应用开发过程中,独立按键比较常见,但是在需要的按键数比较多时,使用矩阵键盘则可以减少io占用,提高系统资源利用率。例如,某mcu项目要求有16个按钮,如果采用独立按键方案,则需要占用16个mcu引脚,如果采用4×4矩阵键盘,则只需要4+4个mcu引脚,节省了一倍io资源占用,如图所示。但是矩阵键盘也有其缺点,相较与独立按键,程序设计稍显复杂。
本文讨论矩阵键盘的工作原理,并提供了一种结构清晰、简单易用的矩阵键盘驱动程序。
2.矩阵键盘工作原理
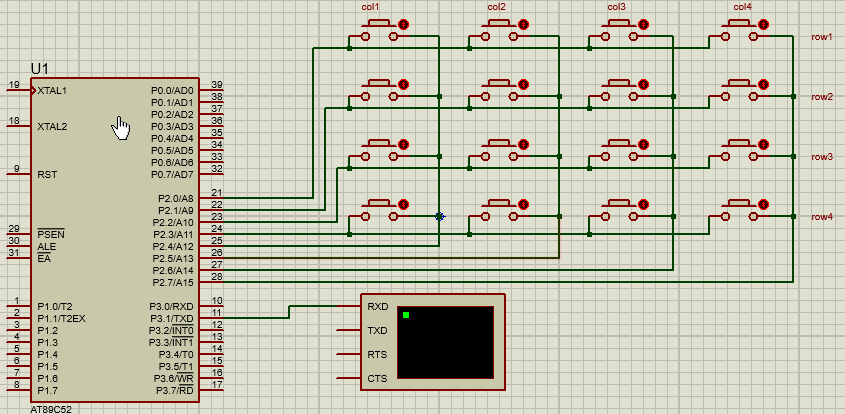

如图所示,4×4矩阵键盘,连接到mcu的P2口8个pin,P2[3:0]为行线,P2[7:4]为列线。
当编程设置P2 = 0Xfe:
则P2.0被设置为0,即第一行所有按钮的一端接地,单片机通过检测P2的高四位,可以判断按下的按钮在哪一列。假如检测到P2 == 0Xee则是第一个按钮被按下,检测到P2 == 0Xde则是第二个按钮被按下,检测到P2 == be则是第三个按钮按下,检测P2 == 7e则是第四个按钮被按下。
当编程设置P2=0Xfd,P2=0Xfb,0Xff:
则以此类推,可分别判定第二行、第三行、第四行哪个按钮被按下。
矩阵键盘常见的检测程序,是逐行检测,即:
// 伪代码
void matrixkbd_scan()
{
unsigned char t;
// 检测第一行
P2 = 0XFE;
t = P2;
if(t != 0xFE) // 说明第一行有按钮被按下
{
delay_10ms(); // 延时10ms,以防止抖动,避免误判断
t = P2;
if(t != 0XFE)
{
switch(t)
{
case 0xee:num = 0;break;
case 0xde:num = 1;break;
case 0xbe:num = 2;break;
case 0xfe:num = 3;break;
}
}
}
//检测第二行
P2 = 0XFD;
...
//检测第三行
P2 = 0XFB;
...
//检测第四行
P2 = 0XFF;
...
}
上述代码的缺点:
- 代码冗余,每一行的检测几乎是重复的代码;
- 每检测一行都需要延时消除抖动,增加了延时,有可能漏检测
3.本文矩阵键盘驱动
3.1 实现思路
思路:
第一步:让行线全部为0,读取列线的值,存储在th中,这个值反映了当前按下按钮所在的列
第二步:让列线全部为0,读取行线的值,存储在tl中,这个值反映了当前按下按钮所在的行
第三步:将th和tl或操作,这个值反映了当前按下按钮的行和列。
例如:
让P2 = 0xf0,然后读取P2的值为0x70,则说明第四列有键按下
让P2 = 0X0F,然后读取P2的值为0x07,则说明第四行有键按下
或操作后,得到0x77,就是第四行第四列这个按钮的按键码
或操作后,得到0xff,说明没有键按下。可以作为判定是否有键按下的条件。
3.2 matrixkbd.c
/**
* @file: matrixkbd.c
* @brief: 矩阵键盘驱动程序
*/
#include
#include
unsigned char key_no;
unsigned char flg_down;
unsigned char flg_up;
static unsigned char timer;
static unsigned stat = 1;
// 按键扫描
// 第一步:让行线全部为0,读取列线的值,存储在th中,这个值反映了当前按下按钮所在的列
// 第二步:让列线全部为0,读取行线的值,存储在tl中,这个值反映了当前按下按钮所在的行
// 第三步:将th和tl或操作,这个值反映了当前按下按钮的行和列。
static unsigned char keyfn()
{
unsigned char th,tl;
P2 = 0xf0;
th = P2;
P2 = 0x0f;
tl = P2;
return th | tl;
}
// 键值转换
static unsigned char decode(unsigned t)
{
unsigned char key_no;
switch(t)
{
case 0xee:key_no = 0;break;
case 0xde:key_no = 1;break;
case 0xbe:key_no = 2;break;
case 0x7e:key_no = 3;break;
case 0xed:key_no = 4;break;
case 0xdd:key_no = 5;break;
case 0xbd:key_no = 6;break;
case 0x7d:key_no = 7;break;
case 0xeb:key_no = 8;break;
case 0xdb:key_no = 9;break;
case 0xbb:key_no = 10;break;
case 0x7b:key_no = 11;break;
case 0xe7:key_no = 12;break;
case 0xd7:key_no = 13;break;
case 0xb7:key_no = 14;break;
case 0x77:key_no = 15;break;
default:key_no = 16;break;
}
return key_no;
}
// 外部调用:保证每10ms调用1次
void key_scan()
{
unsigned char t;
t = keyfn();
if(t != 0xff)
{
if(timer < 1)
{
timer++;
return;
}
if(stat == 1)
{
stat = 0;
// keydown
key_no = decode(t);
flg_down = 1;
}
}
else
{
if(timer > 0)
{
timer--;
return;
}
if(stat == 0)
{
stat = 1;
flg_up = 1;
}
}
}
3.3 对外接口matrixkbd.h
/**
* @file: matrixkbd.h
*/
// 键盘模块
extern unsigned char key_no;
extern unsigned char flg_down;
extern unsigned char flg_up;
extern void key_scan();
4.实验
检测矩阵键盘事件;
按下和弹起时,串口打印输出键编号
4.1 定时器驱动
4.1.1 定时器驱动timer0.c
为了方便调用,采用时间触发方式,添加定时器驱动:
/**
* @file: timer0.c
* @brief: 产生10ms事件
*/
#include
int systick;
unsigned char flg_10ms;
unsigned char flg_50ms;
unsigned char flg_sec;
void timer_init(unsigned char ms)
{
TMOD = (TMOD & 0XF0); // 模式0:13bit 定时器模式,最大计数值8192
TH0 = (8192 - ms * 1000) / 32; // TH0的8位保存13bit初值的高8bit
TL0 = (8192 - ms * 1000) % 32; // TL0的低5位用来存储13bit初值得低5bit
TR0 = 1;
ET0 = 1;
EA = 1;
}
void timer_isr(void) interrupt 1
{
TR0 = 0;
timer_init(1);
systick++;
if(systick % 10 == 0)
{
flg_10ms = 1;
if(systick % 50 == 0)
{
flg_50ms = 1;
if(systick % 1000 == 0)
{
flg_sec = 1;
}
}
}
}
4.1.2 定时器对外接口timer0.h
/**
* @file:timer0.h
*/
// 定时器模块
extern unsigned char flg_10ms;
extern unsigned char flg_50ms;
extern unsigned char flg_sec;
extern void timer_init(unsigned char ms);
4.2 串口驱动
4.2.1 串口驱动实现uart.c
为了方便打印,查看调试信息,实现串口驱动程序:
/**
* @file: uart.c
* @brief: 串口驱动,波特率9600bps,10bit模式
*
*/
#include
void uart_init(void)
{
SCON = 0X50; // 10bit 可变波特率模式
//T1: SM1SM0=10,8bit auto reload,波特率9600bps
TMOD = (TMOD & 0X0F) | (1 << 5);
TH1 = TL1 = 0XFD;
TR1 = 1;
ES = 1;
EA = 1;
TI = 1; // start transmit if using putchar provided by c51 lib
}
void uart_isr(void) interrupt 4
{
if(RI)
{
RI = 0;
}
if(TI)
{
}
}
4.2.2 串口驱动对外接口uart.h
/**
* @file: uart.h
*/
// 串口模块
extern void uart_init(void);
4.3 主程序
主程序中:
- 在后台按照驱动程序要求调用驱动:10ms为周期调用key_scan
- 实时监测事件:flg_up,flg_down,flg_10ms
/**
* @file: main.c
* @brief: 主程序
*/
#include "uart.h"
#include "timer0.h"
#include "matrixkbd.h"
void main(void)
{
timer_init(1);
uart_init();
while(1)
{
if(flg_10ms)
{
flg_10ms = 0;
key_scan();
}
if(flg_down)
{
flg_down = 0;
printf("key %bu pressed\r\n",key_no);
}
if(flg_up)
{
flg_up = 0;
printf("key %bu released\r\n",key_no);
}
}
}
Original: https://www.cnblogs.com/arminker/p/14696975.html
Author: 流云的博客
Title: MCU软件最佳实践——矩阵键盘驱动
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/684482/
转载文章受原作者版权保护。转载请注明原作者出处!