

文章目录
- 前言
- 一、Yolov3 和 Yolov3-tiny
- 1.网络结构
*
– - 二、配置训练参数
* - 1.目标检测数据集
- 2.设置anchor box 和classes
- 三、 配置训练过程
- 四、模型预测
- 总结
- 更新进度
前言
上一篇文章 神奇的目标检测 已经介绍了目标检测的基础啦。目标检测呢,就是在图片中定位出目标的位置,把它”框”出来就好了。本篇文章使用Yolov3 和Yolov3-tiny,以训练VOC2007和口罩检测为例。教大家如何快速的搭建自己的目标检测平台。下面是资源链接:
内容链接VOC2007 数据集
链接
戴口罩数据集
链接
权重文件
链接
提取码:y32mgithub项目地址
链接
完整项目地址(包含所有文件)
链接
提取码 jmpl
; 一、Yolov3 和 Yolov3-tiny
2018 年,推出了Yolov3,相比于Yolov2 最主要的改进又一下几点:
1. 加深了网络,使用Darknet53,提升了模型得检测能力。
2.使用了FPN结构(空间金字塔结构),能增强不同大小目标的检测能力。
3.使用了focal loss,解决了样本不均和分类难得问题。
对于tiny版本来说,只使用了简单的44层卷积用作普通的特征提取,只有两个输出的yolo head (Yolov3有3个yolo head)每个网格点使用两3个anchor boxes(和Yolov3一样)。所以tiny版本检测速度是很快的哦~。
优点:检测速度快,背景误检率低,泛化性强
缺点:召回率低,定位精度较差,对于靠近或遮挡的目标,小目标检测能力弱,容易出现漏检。
1.网络结构
网络结构中包含了很多基础块,我们先实现这些基本的块,然后像搭积木一样将这些块给组装起来。每个块的用途我已经写在代码注释里了。
@wraps(Conv2D)
def DarknetConv2D(*args, **kwargs):
"""Wrapper to set Darknet parameters for Convolution2D."""
darknet_conv_kwargs = {'kernel_regularizer': l2(5e-4)}
darknet_conv_kwargs['padding'] = 'valid' if kwargs.get('strides')==(2,2) else 'same'
darknet_conv_kwargs.update(kwargs)
return Conv2D(*args, **darknet_conv_kwargs)
def DarknetConv2D_BN_Leaky(*args, **kwargs):
"""Darknet Convolution2D followed by BatchNormalization and LeakyReLU."""
no_bias_kwargs = {'use_bias': False}
no_bias_kwargs.update(kwargs)
return compose(
DarknetConv2D(*args, **no_bias_kwargs),
BatchNormalization(),
LeakyReLU(alpha=0.1))
def resblock_body(x, num_filters, num_blocks):
'''A series of resblocks starting with a downsampling Convolution2D'''
x = ZeroPadding2D(((1,0),(1,0)))(x)
x = DarknetConv2D_BN_Leaky(num_filters, (3,3), strides=(2,2))(x)
for i in range(num_blocks):
y = compose(
DarknetConv2D_BN_Leaky(num_filters//2, (1,1)),
DarknetConv2D_BN_Leaky(num_filters, (3,3)))(x)
x = Add()([x,y])
return x
def darknet_body(x):
'''Darknent body having 52 Convolution2D layers'''
x = DarknetConv2D_BN_Leaky(32, (3,3))(x)
x = resblock_body(x, 64, 1)
x = resblock_body(x, 128, 2)
x = resblock_body(x, 256, 8)
x = resblock_body(x, 512, 8)
x = resblock_body(x, 1024, 4)
return x
def make_last_layers(x, num_filters, out_filters):
'''6 Conv2D_BN_Leaky layers followed by a Conv2D_linear layer'''
x = compose(
DarknetConv2D_BN_Leaky(num_filters, (1,1)),
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D_BN_Leaky(num_filters, (1,1)),
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D_BN_Leaky(num_filters, (1,1)))(x)
y = compose(
DarknetConv2D_BN_Leaky(num_filters*2, (3,3)),
DarknetConv2D(out_filters, (1,1)))(x)
return x, y
yolov3-tiny
tiny 版本网络结构比较简单,我们先来看一个图:
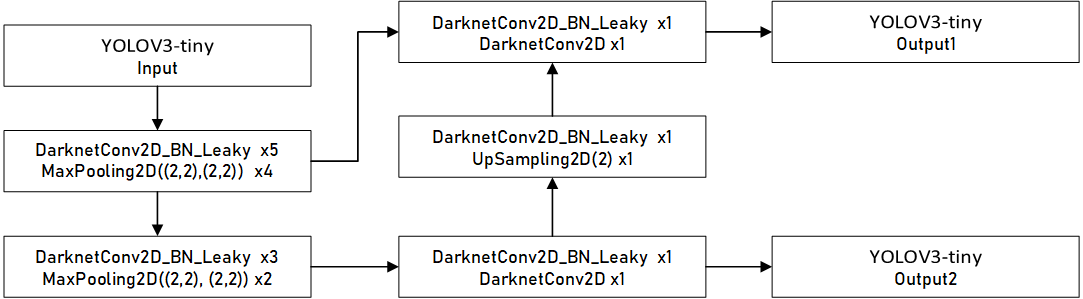

网络中就是普通的卷积核和池化,且网络很浅,网络的计算过程如箭头所示。是不是网络很简单呀~~~~~。
我们接下来看代码如何实现。
def tiny_yolo_body(inputs, num_anchors, num_classes):
'''Create Tiny YOLO_v3 model CNN body in keras.'''
x1 = compose(
DarknetConv2D_BN_Leaky(16, (3,3)),
MaxPooling2D(pool_size=(2,2), strides=(2,2), padding='same'),
DarknetConv2D_BN_Leaky(32, (3,3)),
MaxPooling2D(pool_size=(2,2), strides=(2,2), padding='same'),
DarknetConv2D_BN_Leaky(64, (3,3)),
MaxPooling2D(pool_size=(2,2), strides=(2,2), padding='same'),
DarknetConv2D_BN_Leaky(128, (3,3)),
MaxPooling2D(pool_size=(2,2), strides=(2,2), padding='same'),
DarknetConv2D_BN_Leaky(256, (3,3)))(inputs)
x2 = compose(
MaxPooling2D(pool_size=(2,2), strides=(2,2), padding='same'),
DarknetConv2D_BN_Leaky(512, (3,3)),
MaxPooling2D(pool_size=(2,2), strides=(1,1), padding='same'),
DarknetConv2D_BN_Leaky(1024, (3,3)),
DarknetConv2D_BN_Leaky(256, (1,1)))(x1)
y1 = compose(
DarknetConv2D_BN_Leaky(512, (3,3)),
DarknetConv2D(num_anchors*(num_classes+5), (1,1)))(x2)
x2 = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x2)
y2 = compose(
Concatenate(),
DarknetConv2D_BN_Leaky(256, (3,3)),
DarknetConv2D(num_anchors*(num_classes+5), (1,1)))([x2,x1])
return Model(inputs, [y1,y2])
DarknetConv2D DarknetConv2D_BN_Leaky 是使用二维卷积定义的块,可以去代码里查看,很好理解的。
yolov3
yolov3使用了残差结构和FPN, 网络较深,结构复杂,我们先来看一下他的整体网络结构:
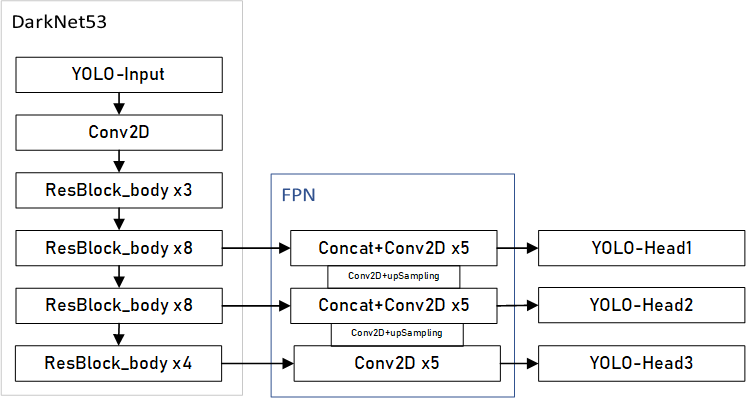
这里使用的FPN(Feature Pyramid Network) 特征金字塔如下图所示:
在目标检测中,往往会包含不用大小的目标,多层卷积后,小目标的语义丢失比较严重,使用FPN 能有效的利用多层特征信息 加强浅层小目标的特征新信息,提升网络的检测能力。
def yolo_body(inputs, num_anchors, num_classes):
"""Create YOLO_V3 model CNN body in Keras."""
darknet = Model(inputs, darknet_body(inputs))
x, y1 = make_last_layers(darknet.output, 512, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(256, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[152].output])
x, y2 = make_last_layers(x, 256, num_anchors*(num_classes+5))
x = compose(
DarknetConv2D_BN_Leaky(128, (1,1)),
UpSampling2D(2))(x)
x = Concatenate()([x,darknet.layers[92].output])
x, y3 = make_last_layers(x, 128, num_anchors*(num_classes+5))
return Model(inputs, [y1,y2,y3])
代码中的 make_last_layers 是产生YOLO的输出层,对于参数 :
num_anchors*(num_classes+5)
yolo3 每个网格点有3个anchor boxes,num_achors=3 ,每个anchor box都要预测所有的类别,假设我们使用的是coco数据集有80类别,num_classes=80, 5代表框的p(框中有目标的概率),x_offset、y_offset、h和w 4个值。yolo head 中的输出维度就为 [batch_size,w,h,3x(4+1+80)]。 如下图所示:
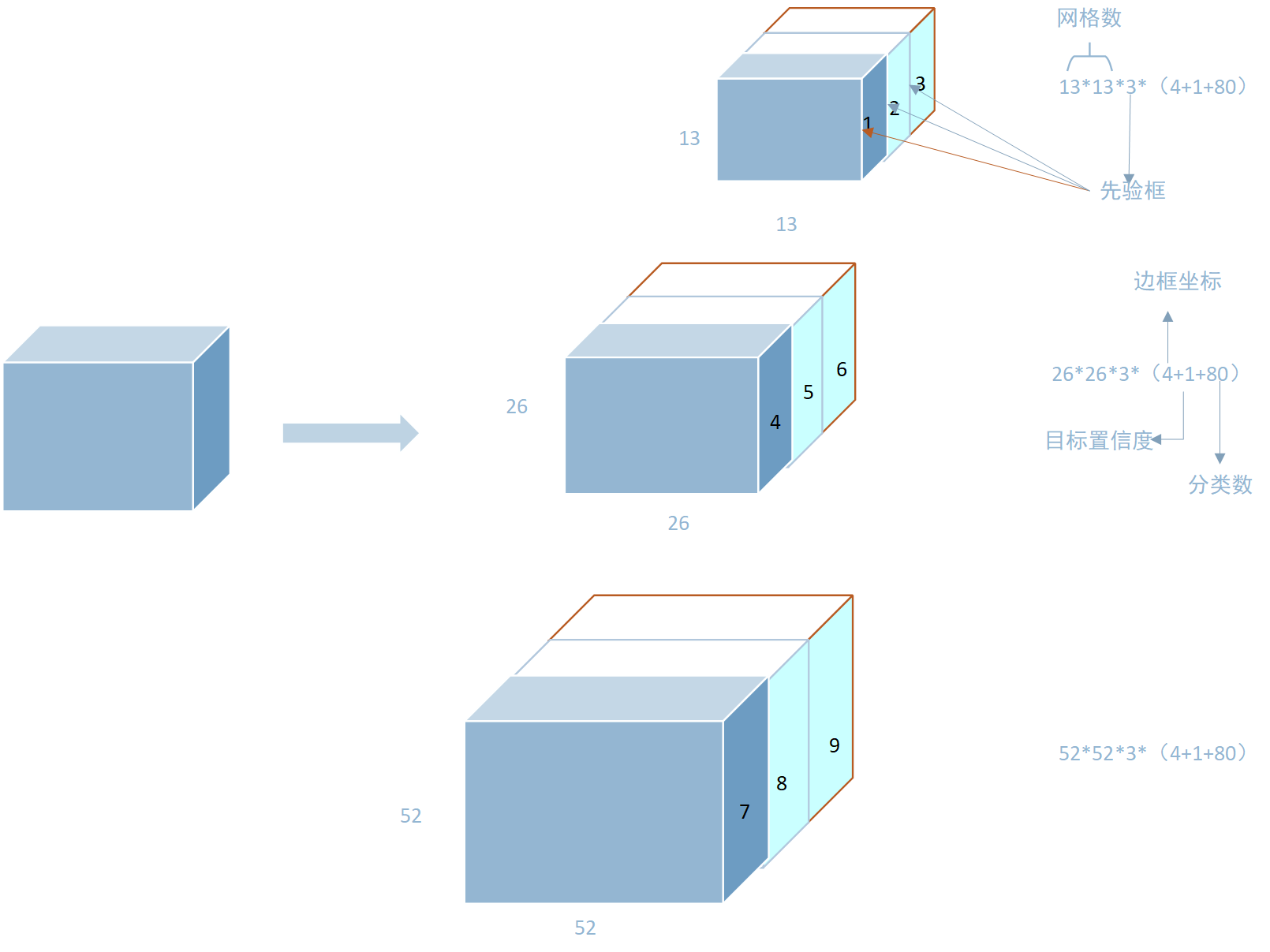
大家都会说Yolo会将图片划分为13×13,26×26, 52×52 的网格,但不是直接的物理划分,而是用这样的卷积层来表示。将每一个网格点的参数,藏在卷积特征层中,来表示物体的位置信息和类别。
网格131326265252
感受野*
大 (大目标)中 (中目标)小 (小目标)
先验框 coco
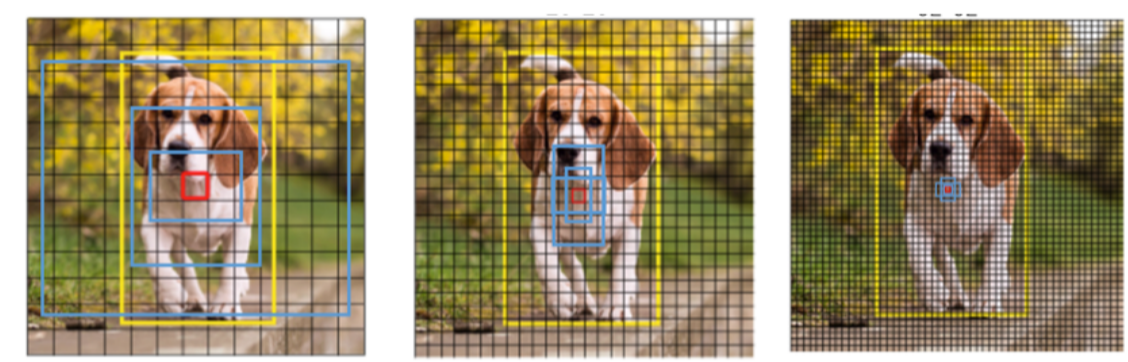
)116×90,156×198,373x32630x61,62×45,59x11910x13,16×30,33×23
上图中 黄色表示真实框, 红色表示目标中心点所在的网格。蓝色表示所设置的anchor boxes,分别检测大中小三种目标。不仅仅是以红色网格点为中心有先验框,会以每个网格点为中心都会有三个这样的先验证框。 预测框数 == 网格数*锚框数。也就是总共有32x32x3+26x26x3+52x52x3个锚框。所以Yolo算法是对图片使用了”人海战术”。
框的回归
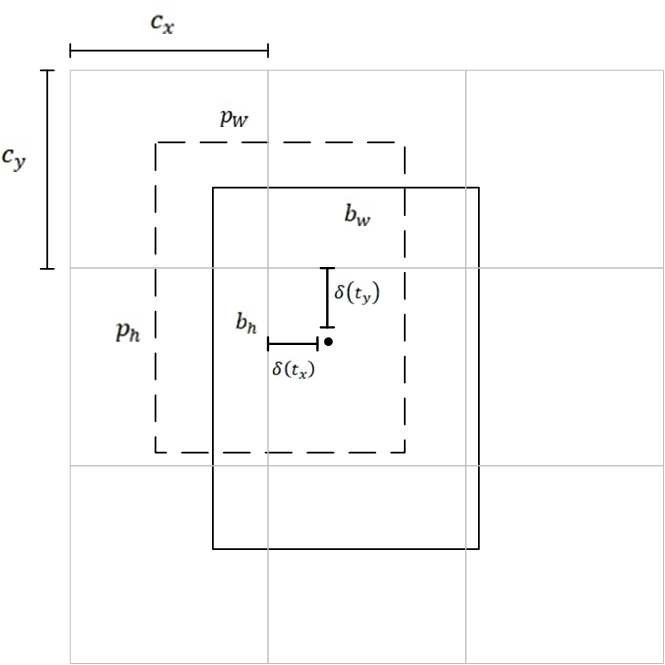
首先我们要明白,特征图(也就是Yolo head)表示预测框的信息:
1.坐标信息:t x , t y , t w , t h t_x,t_y,t_w,t_h t x ,t y ,t w ,t h
2.坐标置信度(有无目标):P o b j P_obj P o b j
3.分类:p c p_c p c
上图中锚框为长宽[Pw,Ph],中心点为[cx,cy],预测框为[bw,bh],现在我们需要把锚框向真实框靠近需要进行两步.
第一步:中心点偏移。
其中,δ 为sigmoid 函数,bx,by为预测框中心点坐标。
第二步:宽高拉伸
这样就得到了框的长宽。我们就能还原出这样一个真实物体的框啦。
通过这样的方式就会将特征图的信息还原成,真实框啦,训练时我们训练得到的就是这些能让锚框偏移的信息。
为什么要用sigmoid 函数 和exp指数呢?。因为在中心点偏移时,我们希望中心点只在它所在的网格里偏移,所以需要将其转化为0~1之间。sigmoid激活函数正好做了这件事。 宽高拉伸是因为我们宽和高的取值都是正的,那么exp函数的值域正好为0~正无穷。
; 二、配置训练参数
1.目标检测数据集
以VOC 2007 数据集为例,首先来看一下文件树:
─VOC2007
├─Annotations
│ └─000005.xml
│ └─000006.xml
│ └─xxxx.xml
├─ImageSets
│ └─Main
└─JPEGImages
│ └─000005.jpg
│ └─000006.jpg
│ └─xxxx.jpg
每一个xml 包含同名jpg 中目标的位置以及类别,在训练时,首先要将数据 通过 voc_annotation.py 转换到记事本中,方便训练时读取。记事本形式如下:
VOC2007/JPEGImages/000005.jpg(图片路径)98,267,194,383(框的位置) ,1(框中目标的类别)
VOC2007/JPEGImages/000006.jpg(图片路径)99,205,198,318(框的位置) ,1(框中目标的类别)
这样的数据是无法直接和YOLO的输出进行计算的,那么我们还需要将,这种数据编码成和yolo head 的格式一样,才能去计算loss,反向传播调整参数
通过如下函数将y_ture,转换成和y_predict 一样的形式:
def preprocess_true_boxes(true_boxes, input_shape, anchors, num_classes):
'''Preprocess true boxes to training input format
Parameters
----------
true_boxes: array, shape=(m, T, 5)
Absolute x_min, y_min, x_max, y_max, class_id relative to input_shape.
input_shape: array-like, hw, multiples of 32
anchors: array, shape=(N, 2), wh
num_classes: integer
Returns
-------
y_true: list of array, shape like yolo_outputs, xywh are reletive value
'''
assert (true_boxes[..., 4]<num_classes).all(), 'class id must be less than num_classes'
num_layers = len(anchors)//3
anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]]
true_boxes = np.array(true_boxes, dtype='float32')
input_shape = np.array(input_shape, dtype='int32')
boxes_xy = (true_boxes[..., 0:2] + true_boxes[..., 2:4]) // 2
boxes_wh = true_boxes[..., 2:4] - true_boxes[..., 0:2]
true_boxes[..., 0:2] = boxes_xy/input_shape[::-1]
true_boxes[..., 2:4] = boxes_wh/input_shape[::-1]
m = true_boxes.shape[0]
grid_shapes = [input_shape//{0:32, 1:16, 2:8}[l] for l in range(num_layers)]
y_true = [np.zeros((m,grid_shapes[l][0],grid_shapes[l][1],len(anchor_mask[l]),5+num_classes),
dtype='float32') for l in range(num_layers)]
anchors = np.expand_dims(anchors, 0)
anchor_maxes = anchors / 2.
anchor_mins = -anchor_maxes
valid_mask = boxes_wh[..., 0]>0
for b in range(m):
wh = boxes_wh[b, valid_mask[b]]
if len(wh)==0: continue
wh = np.expand_dims(wh, -2)
box_maxes = wh / 2.
box_mins = -box_maxes
intersect_mins = np.maximum(box_mins, anchor_mins)
intersect_maxes = np.minimum(box_maxes, anchor_maxes)
intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
box_area = wh[..., 0] * wh[..., 1]
anchor_area = anchors[..., 0] * anchors[..., 1]
iou = intersect_area / (box_area + anchor_area - intersect_area)
best_anchor = np.argmax(iou, axis=-1)
for t, n in enumerate(best_anchor):
for l in range(num_layers):
if n in anchor_mask[l]:
i = np.floor(true_boxes[b,t,0]*grid_shapes[l][1]).astype('int32')
j = np.floor(true_boxes[b,t,1]*grid_shapes[l][0]).astype('int32')
k = anchor_mask[l].index(n)
c = true_boxes[b,t, 4].astype('int32')
y_true[l][b, j, i, k, 0:4] = true_boxes[b,t, 0:4]
y_true[l][b, j, i, k, 4] = 1
y_true[l][b, j, i, k, 5+c] = 1
return y_true
数据集放置如下图所示:
2.设置anchor box 和classes
Yolo 中的anchor boxes 是通过数据集中框的大小通过 kmeans聚类而来,yolov3 有三个输出,每个网格预测3个,所以 Kmeans中的K设置9,如果是tiny版本的话,就设置为6。代码如下:
import numpy as np
"""
Kmeans 聚类算法, 根据 数据集中的xml 文件 聚类出是和目标的anchor boxes
"""
class YOLO_Kmeans:
def __init__(self, cluster_number, filename):
self.cluster_number = cluster_number
self.filename =filename
def iou(self, boxes, clusters):
n = boxes.shape[0]
k = self.cluster_number
box_area = boxes[:, 0] * boxes[:, 1]
box_area = box_area.repeat(k)
box_area = np.reshape(box_area, (n, k))
cluster_area = clusters[:, 0] * clusters[:, 1]
cluster_area = np.tile(cluster_area, [1, n])
cluster_area = np.reshape(cluster_area, (n, k))
box_w_matrix = np.reshape(boxes[:, 0].repeat(k), (n, k))
cluster_w_matrix = np.reshape(np.tile(clusters[:, 0], (1, n)), (n, k))
min_w_matrix = np.minimum(cluster_w_matrix, box_w_matrix)
box_h_matrix = np.reshape(boxes[:, 1].repeat(k), (n, k))
cluster_h_matrix = np.reshape(np.tile(clusters[:, 1], (1, n)), (n, k))
min_h_matrix = np.minimum(cluster_h_matrix, box_h_matrix)
inter_area = np.multiply(min_w_matrix, min_h_matrix)
result = inter_area / (box_area + cluster_area - inter_area)
return result
def avg_iou(self, boxes, clusters):
accuracy = np.mean([np.max(self.iou(boxes, clusters), axis=1)])
return accuracy
def kmeans(self, boxes, k, dist=np.median):
box_number = boxes.shape[0]
distances = np.empty((box_number, k))
last_nearest = np.zeros((box_number,))
np.random.seed()
clusters = boxes[np.random.choice(
box_number, k, replace=False)]
while True:
distances = 1 - self.iou(boxes, clusters)
current_nearest = np.argmin(distances, axis=1)
if (last_nearest == current_nearest).all():
break
for cluster in range(k):
clusters[cluster] = dist(
boxes[current_nearest == cluster], axis=0)
last_nearest = current_nearest
return clusters
def result2txt(self, data):
f = open("yolo_anchors1.txt", 'w')
row = np.shape(data)[0]
for i in range(row):
if i == 0:
x_y = "%d,%d" % (data[i][0], data[i][1])
else:
x_y = ", %d,%d" % (data[i][0], data[i][1])
f.write(x_y)
f.close()
def txt2boxes(self):
f = open(self.filename, 'r')
dataSet = []
for line in f:
infos = line.split(" ")
length = len(infos)
for i in range(1, length):
width = int(infos[i].split(",")[2]) - \
int(infos[i].split(",")[0])
height = int(infos[i].split(",")[3]) - \
int(infos[i].split(",")[1])
dataSet.append([width, height])
result = np.array(dataSet)
f.close()
return result
def txt2clusters(self):
all_boxes = self.txt2boxes()
result = self.kmeans(all_boxes, k=self.cluster_number)
result = result[np.lexsort(result.T[0, None])]
self.result2txt(result)
print("K anchors:\n {}".format(result))
print("Accuracy: {:.2f}%".format(
self.avg_iou(all_boxes, result) * 100))
if __name__ == "__main__":
cluster_number =9
filename = r"2007_train.txt"
kmeans = YOLO_Kmeans(cluster_number, filename)
kmeans.txt2clusters()
当然也可以使用yolo中默认的achor box的大小。
classes.txt 是声明 你目标中所有的类别,以戴口罩数据集为例
without_mask
with_mask
mask_weared_incorrect
文本中书写的类别要和你xml 文件中所写类别保持一致,才能正确索引。
三、 配置训练过程
训练过程需要配置的东西,就是之前的数据准备。输入模型即可。
训练过错内存溢出,记得吧batch_size 改小一点,yolo完整版的话一般设置为8比较好
代码:
def train():
train_annotation_path = r"2007_train.txt"
val_annotation_path = r"2007_val.txt"
anchors_path = r"model_data\mask_anchor.txt"
classes_path = r"model_data\mask_classes.txt"
log_dir = "logs/tiny_log/"
weights_dir = "weights/"
class_names = get_classes(classes_path)
num_classes = len(class_names)
anchors = get_anchors(anchors_path)
input_shape = (416, 416)
model = create_tiny_model(
input_shape=input_shape,
anchors=anchors,
num_classes=num_classes,
freeze_body=2,
weights_path="model_data\yolov3-tiny.h5",
)
''''
# yolo v3 的完整版本 ,
model = create_model(
input_shape=input_shape,
anchors=anchors,
num_classes=num_classes,
# freeze_body=0,
weights_path="model_data\yolov3.h5",
)
'''
print(len(model.layers))
logging = TensorBoard(log_dir=log_dir)
checkpoint = ModelCheckpoint(
weights_dir + "ep{epoch:03d}-loss{loss:.3f}-val_loss{val_loss:.3f}.h5",
monitor="val_loss",
save_weights_only=True,
save_best_only=True,
period=3,
)
reduce_lr = ReduceLROnPlateau(monitor="val_loss", factor=0.1, patience=3, verbose=1)
early_stopping = EarlyStopping(
monitor="val_loss", min_delta=0, patience=10, verbose=1
)
with open(train_annotation_path) as f:
train_lines = f.readlines()
with open(val_annotation_path) as f:
val_lines = f.readlines()
num_train = len(train_lines)
num_val = len(val_lines)
Freeze_Train = True
if Freeze_Train:
batch_size = 32
model.compile(
optimizer=Adam(1e-3),
loss={
"yolo_loss": lambda y_true, y_pred: y_pred}
)
print("Train on {} samples, val on {} samples, with batch size {}.".format(num_train, num_val, batch_size))
model.fit(
data_generator_wrapper(train_lines,batch_size,input_shape,anchors,num_classes),
steps_per_epoch=max(1,num_train//batch_size),
validation_data=data_generator_wrapper(val_lines,batch_size,input_shape,anchors,num_classes),
validation_steps=max(1,num_val//batch_size),
epochs=50,
initial_epoch=0,
callbacks=[logging,checkpoint]
)
model.save_weights(weights_dir+'trained_weights_stage_1.h5')
if True:
for i in range(len(model.layers)): model.layers[i].trainable = True
model.compile(optimizer=Adam(lr=1e-4), loss={'yolo_loss': lambda y_true, y_pred: y_pred})
print('Unfreeze all of the layers.')
batch_size = 32
print('Train on {} samples, val on {} samples, with batch size {}.'.format(num_train, num_val, batch_size))
model.fit_generator(data_generator_wrapper(train_lines, batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train//batch_size),
validation_data=data_generator_wrapper(val_lines, batch_size, input_shape, anchors, num_classes),
validation_steps=max(1, num_val//batch_size),
epochs=100,
initial_epoch=50,
callbacks=[logging, checkpoint, reduce_lr, early_stopping])
model.save_weights(log_dir + 'trained_weights_final.h5')
if __name__=='__main__':
train()
上述就是训练过程了,训练时,
注意:
使用model 时,tiny 和YOLOv3 achor 不一样,一个是6 类 一个是9类 ,记得更换。
tips:训练过错先冻结一部分层去训练,这样训练比较快,当损失稳定之后,使用更小的学习率去,趋势模型收敛更好。
训练结果如下:
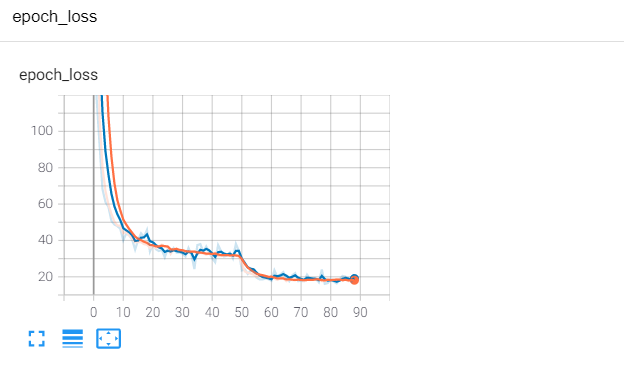
可以看出收敛效果还是相当不错的。。。。
四、模型预测
模型预测,将图片输入到保存的模型当中,如果输出一个跟yolo head 一样的维度,很显然这个时候我们是无法获图片的类别还有框的,那么需要通过解码,拿到我们有用的数据。这个工作在项目中的yolo.py 中实现。
_defaults = {
"model_path": r"logs\yolov3_log\trained_weights_final.h5",
"anchors_path": "model_data\mask_anchor.txt",
"classes_path": "model_data\mask_classes.txt",
"score": 0.3,
"iou": 0.3,
"model_image_size": (416, 416),
"gpu_num": 1,
}
模型预测完整代码:
import time
import cv2
import numpy as np
import tensorflow as tf
from PIL import Image
from yolo import YOLO,detect_video
import os
from tqdm import tqdm
def predict():
yolo=YOLO()
predict_model='dir_predict'
video_path= 0
video_save_path=""
dir_img_input='img/'
dir_save_path='out_img/'
if predict_model=='img':
while(True):
img=input('Input image filename:')
try:
image=Image.open(img)
except:
print('Open Image Error! Please Try Again')
continue
else:
out_image=yolo.detect_image(image)
out_image.show()
elif predict_model=='video':
detect_video(yolo,video_path,video_save_path)
elif predict_model=='dir_predict':
imgs=os.listdir(dir_img_input)
for img_name in tqdm(imgs):
if img_name.lower().endswith(('.bmp', '.dib', '.png', '.jpg', '.jpeg', '.pbm', '.pgm', '.ppm', '.tif', '.tiff')):
image_path = os.path.join(dir_img_input, img_name)
image = Image.open(image_path)
r_image = yolo.detect_image(image)
if not os.path.exists(dir_save_path):
os.makedirs(dir_save_path)
r_image.save(os.path.join(dir_save_path, img_name))
else:
raise AssertionError("Please specify the correct mode: 'img', 'video', 'dir_predict'.")
if __name__=='__main__':
predict()
使用方法写在注释里了。支持视频,图片 文件夹
检测结果:

总结
目标检测网络结构,其实跟图像分类差不多,但对数据读取过程,编码解码过程比较复杂,对于这个过程,我掌握不是很多,所以就不在这里讲解了。
目标检测训练比较难,数据标注比较麻烦。后面可能会出一期视频,教大家如何配置。所有代码和资源均会上传,写代码不易,欢迎点赞~
更新进度
2022/1/15日。重置了YOLOV3 Anchor 框的设置理论讲解。接下来完成anchor boxes 框是如何回归及loss 计算过程。
2022/2/5日。添加了anchor boxes 和预测框之间的计算过程。
2022/2/14日,更改冗余错误,接下来会去重置代码。
Original: https://blog.csdn.net/qq_38676487/article/details/120443059
Author: 不想写代码
Title: Yolov3 和 Yolov3-tiny目标检测算法理论与实现(TensorFlow2)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/682105/
转载文章受原作者版权保护。转载请注明原作者出处!