

KITTI数据集评估方法小结
- 1 平台与资源
- 2 编译与运行
- 3 文件格式及目录结构
* - 3.1 格式
- 3.2 文件结构
- 4 运行
- 5 代码
- 6 注意
* - 1) AP_R11与AP_R40的选择
- 2) MIN_OVERLAP的选择
- 7 救苦救难的Python验证代码
建议先通篇阅读,了解需要修改什么、文件如何组织等,再进行实践,因为涉及到一些代码的问题。你既可以使用
.cpp代码+Linux系统的原汁原味操作,也可以选择python代码直接评估的方式,便捷、优雅。
1 平台与资源
Windows上我试过Visual Studio 2022编译、下载安装CMake、cmd操作等,不是报头文件错误,就是Boost缺少,反正过程就不说了,之后我才知道缺少的那些好多包其实是 Linux系统上自带的。最后是在腾讯云上购买了Ubuntu系统一年使用权,正好最近春节有活动,hh
链接:(1)github上较多的evaluate_object_3d_offline文件以及(2)我后面主要使用的CSDN博主修改evaluate_object文件,两个都可以。
2 编译与运行
编译的时候在放置 .cpp文件与 .h文件的目录下运行指令,主要参考链接(2)这位老哥的方法:
cmake .
make
g++ -O3 -DNDEBUG -o evaluate_object evaluate_object.cpp
一步一步来,反正基本上每一步都会报错,报啥错、缺啥包,直接去网上搜ubuntu系统安装某个包的方法 (我也是小白)。
编译好了后没有问题了,会生成一个不带后缀的 evaluate_object文件,下面就只剩下数据准备(可以先进行)与运行了。另外,我只是第一次用了 cmake .与 make 指令,后面再编译的时候发现 只用第三行指令也可以编译好。
3 文件格式及目录结构
在运行之前,我们还需要准备数据噻,label与results。
3.1 格式
labels就是kitti数据集里面的label_2,选择你需要的N个测试文件,如3769个,格式如下:
typetruncatedoccludedalphabboxdimensionslocationrotation_yPedestrian-1-10.29873.70 152.10 933.44 256.071.87 0.50 0.905.42 1.50 13.430.67
预测结果格式如下:(注意,最后一个数字是预测结果特有的score)
typetruncatedoccludedalphabboxdimensionslocationrotation_yscorePedestrian-1-10.29873.70 152.10 933.44 256.071.87 0.50 0.905.42 1.50 13.430.670.99
The detection format should be simillar to the KITTI dataset label format with 15 columns representing:
ValuesNameDescription1typeDescribes the type of object: ‘Car’, ‘Van’, ‘Truck’, ‘Pedestrian’, ‘Person_sitting’, ‘Cyclist’, ‘Tram’, ‘Misc’ or ‘DontCare’1truncated-11occluded-11alphaObservation angle of object, ranging [-pi…pi]4bbox2D bounding box of object in the image (0-based index): contains left, top, right, bottom pixel coordinates3dimensions3D object dimensions: height, width, length (in meters)3location3D object location x,y,z in camera coordinates (in meters)1rotation_yRotation ry around Y-axis in camera coordinates [-pi…pi]1score
Only for results
: Float, indicating confidence in detection, needed for p/r curves, higher is better.
3.2 文件结构
evaluate_object
evaluate_object.cpp
mail.h
label
--000001.txt
--000002.txt
-- ...
results
--data
--000001.txt
--000002.txt
-- ...
4 运行
./evaluate_object label results
成功的话,会在results目录下生成plot文件夹和一些 .txt 文件,我一般只查看 result.txt 来记录。
5 代码
参见博客文章(2)
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include "mail.h"
BOOST_GEOMETRY_REGISTER_C_ARRAY_CS(cs::cartesian)
typedef boost::geometry::model::polygon<boost::geometry::model::d2::point_xy<double> > Polygon;
using namespace std;
const int32_t N_TESTIMAGES = 7480;
enum DIFFICULTY{EASY=0, MODERATE=1, HARD=2};
enum METRIC{IMAGE=0, GROUND=1, BOX3D=2};
const int32_t MIN_HEIGHT[3] = {40, 25, 25};
const int32_t MAX_OCCLUSION[3] = {0, 1, 2};
const double MAX_TRUNCATION[3] = {0.15, 0.3, 0.5};
enum CLASSES{CAR=0, PEDESTRIAN=1, CYCLIST=2};
const int NUM_CLASS = 3;
vector<string> CLASS_NAMES;
const double MIN_OVERLAP[3][3] = {{0.7, 0.5, 0.5}, {0.5, 0.25, 0.25}, {0.5, 0.25, 0.25}};
const double N_SAMPLE_PTS = 41;
void initGlobals () {
CLASS_NAMES.push_back("car");
CLASS_NAMES.push_back("pedestrian");
CLASS_NAMES.push_back("cyclist");
}
struct tPrData {
vector<double> v;
double similarity;
int32_t tp;
int32_t fp;
int32_t fn;
tPrData () :
similarity(0), tp(0), fp(0), fn(0) {}
};
struct tBox {
string type;
double x1;
double y1;
double x2;
double y2;
double alpha;
tBox (string type, double x1,double y1,double x2,double y2,double alpha) :
type(type),x1(x1),y1(y1),x2(x2),y2(y2),alpha(alpha) {}
};
struct tGroundtruth {
tBox box;
double truncation;
int32_t occlusion;
double ry;
double t1, t2, t3;
double h, w, l;
tGroundtruth () :
box(tBox("invalild",-1,-1,-1,-1,-10)),truncation(-1),occlusion(-1) {}
tGroundtruth (tBox box,double truncation,int32_t occlusion) :
box(box),truncation(truncation),occlusion(occlusion) {}
tGroundtruth (string type,double x1,double y1,double x2,double y2,double alpha,double truncation,int32_t occlusion) :
box(tBox(type,x1,y1,x2,y2,alpha)),truncation(truncation),occlusion(occlusion) {}
};
struct tDetection {
tBox box;
double thresh;
double ry;
double t1, t2, t3;
double h, w, l;
tDetection ():
box(tBox("invalid",-1,-1,-1,-1,-10)),thresh(-1000) {}
tDetection (tBox box,double thresh) :
box(box),thresh(thresh) {}
tDetection (string type,double x1,double y1,double x2,double y2,double alpha,double thresh) :
box(tBox(type,x1,y1,x2,y2,alpha)),thresh(thresh) {}
};
vector<int32_t> indices;
vector<tDetection> loadDetections(string file_name, bool &compute_aos,
vector<bool> &eval_image, vector<bool> &eval_ground,
vector<bool> &eval_3d, bool &success) {
vector<tDetection> detections;
FILE *fp = fopen(file_name.c_str(),"r");
if (!fp) {
success = false;
return detections;
}
while (!feof(fp)) {
tDetection d;
double trash;
char str[255];
if (fscanf(fp, "%s %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf",
str, &trash, &trash, &d.box.alpha, &d.box.x1, &d.box.y1,
&d.box.x2, &d.box.y2, &d.h, &d.w, &d.l, &d.t1, &d.t2, &d.t3,
&d.ry, &d.thresh)==16) {
d.box.type = str;
detections.push_back(d);
if(d.box.alpha == -10)
compute_aos = false;
for (int c = 0; c < NUM_CLASS; c++) {
if (!strcasecmp(d.box.type.c_str(), CLASS_NAMES[c].c_str())) {
if (!eval_image[c] && d.box.x1 >= 0)
eval_image[c] = true;
if (!eval_ground[c] && d.t1 != -1000)
eval_ground[c] = true;
if (!eval_3d[c] && d.t2 != -1000)
eval_3d[c] = true;
break;
}
}
}
}
fclose(fp);
success = true;
return detections;
}
vector<tGroundtruth> loadGroundtruth(string file_name,bool &success) {
vector<tGroundtruth> groundtruth;
FILE *fp = fopen(file_name.c_str(),"r");
if (!fp) {
success = false;
return groundtruth;
}
while (!feof(fp)) {
tGroundtruth g;
char str[255];
if (fscanf(fp, "%s %lf %d %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf %lf",
str, &g.truncation, &g.occlusion, &g.box.alpha,
&g.box.x1, &g.box.y1, &g.box.x2, &g.box.y2,
&g.h, &g.w, &g.l, &g.t1,
&g.t2, &g.t3, &g.ry )==15) {
g.box.type = str;
groundtruth.push_back(g);
}
}
fclose(fp);
success = true;
return groundtruth;
}
void saveStats (const vector<double> &precision, const vector<double> &aos, FILE *fp_det, FILE *fp_ori) {
if(precision.empty())
return;
for (int32_t i=0; i<precision.size(); i++)
fprintf(fp_det,"%f ",precision[i]);
fprintf(fp_det,"\n");
if(aos.empty())
return;
for (int32_t i=0; i<aos.size(); i++)
fprintf(fp_ori,"%f ",aos[i]);
fprintf(fp_ori,"\n");
}
inline double imageBoxOverlap(tBox a, tBox b, int32_t criterion=-1){
double o = -1;
double x1 = max(a.x1, b.x1);
double y1 = max(a.y1, b.y1);
double x2 = min(a.x2, b.x2);
double y2 = min(a.y2, b.y2);
double w = x2-x1;
double h = y2-y1;
if(w0 || h0)
return 0;
double inter = w*h;
double a_area = (a.x2-a.x1) * (a.y2-a.y1);
double b_area = (b.x2-b.x1) * (b.y2-b.y1);
if(criterion==-1)
o = inter / (a_area+b_area-inter);
else if(criterion==0)
o = inter / a_area;
else if(criterion==1)
o = inter / b_area;
return o;
}
inline double imageBoxOverlap(tDetection a, tGroundtruth b, int32_t criterion=-1){
return imageBoxOverlap(a.box, b.box, criterion);
}
template <typename T>
Polygon toPolygon(const T& g) {
using namespace boost::numeric::ublas;
using namespace boost::geometry;
matrix<double> mref(2, 2);
mref(0, 0) = cos(g.ry); mref(0, 1) = sin(g.ry);
mref(1, 0) = -sin(g.ry); mref(1, 1) = cos(g.ry);
static int count = 0;
matrix<double> corners(2, 4);
double data[] = {g.l / 2, g.l / 2, -g.l / 2, -g.l / 2,
g.w / 2, -g.w / 2, -g.w / 2, g.w / 2};
std::copy(data, data + 8, corners.data().begin());
matrix<double> gc = prod(mref, corners);
for (int i = 0; i < 4; ++i) {
gc(0, i) += g.t1;
gc(1, i) += g.t3;
}
double points[][2] = {{gc(0, 0), gc(1, 0)},{gc(0, 1), gc(1, 1)},{gc(0, 2), gc(1, 2)},{gc(0, 3), gc(1, 3)},{gc(0, 0), gc(1, 0)}};
Polygon poly;
append(poly, points);
return poly;
}
inline double groundBoxOverlap(tDetection d, tGroundtruth g, int32_t criterion = -1) {
using namespace boost::geometry;
Polygon gp = toPolygon(g);
Polygon dp = toPolygon(d);
std::vector<Polygon> in, un;
intersection(gp, dp, in);
union_(gp, dp, un);
double inter_area = in.empty() ? 0 : area(in.front());
double union_area = area(un.front());
double o;
if(criterion==-1)
o = inter_area / union_area;
else if(criterion==0)
o = inter_area / area(dp);
else if(criterion==1)
o = inter_area / area(gp);
return o;
}
inline double box3DOverlap(tDetection d, tGroundtruth g, int32_t criterion = -1) {
using namespace boost::geometry;
Polygon gp = toPolygon(g);
Polygon dp = toPolygon(d);
std::vector<Polygon> in, un;
intersection(gp, dp, in);
union_(gp, dp, un);
double ymax = min(d.t2, g.t2);
double ymin = max(d.t2 - d.h, g.t2 - g.h);
double inter_area = in.empty() ? 0 : area(in.front());
double inter_vol = inter_area * max(0.0, ymax - ymin);
double det_vol = d.h * d.l * d.w;
double gt_vol = g.h * g.l * g.w;
double o;
if(criterion==-1)
o = inter_vol / (det_vol + gt_vol - inter_vol);
else if(criterion==0)
o = inter_vol / det_vol;
else if(criterion==1)
o = inter_vol / gt_vol;
return o;
}
vector<double> getThresholds(vector<double> &v, double n_groundtruth){
vector<double> t;
sort(v.begin(), v.end(), greater<double>());
double current_recall = 0;
for(int32_t i=0; i<v.size(); i++){
double l_recall, r_recall, recall;
l_recall = (double)(i+1)/n_groundtruth;
if(i<(v.size()-1))
r_recall = (double)(i+2)/n_groundtruth;
else
r_recall = l_recall;
if( (r_recall-current_recall) < (current_recall-l_recall) && i<(v.size()-1))
continue;
recall = l_recall;
t.push_back(v[i]);
current_recall += 1.0/(N_SAMPLE_PTS-1.0);
}
return t;
}
void cleanData(CLASSES current_class, const vector<tGroundtruth> >, const vector<tDetection> &det, vector<int32_t> &ignored_gt, vector<tGroundtruth> &dc, vector<int32_t> &ignored_det, int32_t &n_gt, DIFFICULTY difficulty){
for(int32_t i=0;i<gt.size(); i++){
double height = gt[i].box.y2 - gt[i].box.y1;
int32_t valid_class;
if(!strcasecmp(gt[i].box.type.c_str(), CLASS_NAMES[current_class].c_str()))
valid_class = 1;
else if(!strcasecmp(CLASS_NAMES[current_class].c_str(), "Pedestrian") && !strcasecmp("Person_sitting", gt[i].box.type.c_str()))
valid_class = 0;
else if(!strcasecmp(CLASS_NAMES[current_class].c_str(), "Car") && !strcasecmp("Van", gt[i].box.type.c_str()))
valid_class = 0;
else
valid_class = -1;
bool ignore = false;
if(gt[i].occlusion>MAX_OCCLUSION[difficulty] || gt[i].truncation>MAX_TRUNCATION[difficulty] || height<MIN_HEIGHT[difficulty])
ignore = true;
if(valid_class==1 && !ignore){
ignored_gt.push_back(0);
n_gt++;
}
else if(valid_class==0 || (ignore && valid_class==1))
ignored_gt.push_back(1);
else
ignored_gt.push_back(-1);
}
for(int32_t i=0;i<gt.size(); i++)
if(!strcasecmp("DontCare", gt[i].box.type.c_str()))
dc.push_back(gt[i]);
for(int32_t i=0;i<det.size(); i++){
int32_t valid_class;
if(!strcasecmp(det[i].box.type.c_str(), CLASS_NAMES[current_class].c_str()))
valid_class = 1;
else
valid_class = -1;
int32_t height = fabs(det[i].box.y1 - det[i].box.y2);
if(height<MIN_HEIGHT[difficulty])
ignored_det.push_back(1);
else if(valid_class==1)
ignored_det.push_back(0);
else
ignored_det.push_back(-1);
}
}
tPrData computeStatistics(CLASSES current_class, const vector<tGroundtruth> >,
const vector<tDetection> &det, const vector<tGroundtruth> &dc,
const vector<int32_t> &ignored_gt, const vector<int32_t> &ignored_det,
bool compute_fp, double (*boxoverlap)(tDetection, tGroundtruth, int32_t),
METRIC metric, bool compute_aos=false, double thresh=0, bool debug=false){
tPrData stat = tPrData();
const double NO_DETECTION = -10000000;
vector<double> delta;
vector<bool> assigned_detection;
assigned_detection.assign(det.size(), false);
vector<bool> ignored_threshold;
ignored_threshold.assign(det.size(), false);
if(compute_fp)
for(int32_t i=0; i<det.size(); i++)
if(det[i].thresh<thresh)
ignored_threshold[i] = true;
for(int32_t i=0; i<gt.size(); i++){
if(ignored_gt[i]==-1)
continue;
int32_t det_idx = -1;
double valid_detection = NO_DETECTION;
double max_overlap = 0;
bool assigned_ignored_det = false;
for(int32_t j=0; j<det.size(); j++){
if(ignored_det[j]==-1)
continue;
if(assigned_detection[j])
continue;
if(ignored_threshold[j])
continue;
double overlap = boxoverlap(det[j], gt[i], -1);
if(!compute_fp && overlap>MIN_OVERLAP[metric][current_class] && det[j].thresh>valid_detection){
det_idx = j;
valid_detection = det[j].thresh;
}
else if(compute_fp && overlap>MIN_OVERLAP[metric][current_class] && (overlap>max_overlap || assigned_ignored_det) && ignored_det[j]==0){
max_overlap = overlap;
det_idx = j;
valid_detection = 1;
assigned_ignored_det = false;
}
else if(compute_fp && overlap>MIN_OVERLAP[metric][current_class] && valid_detection==NO_DETECTION && ignored_det[j]==1){
det_idx = j;
valid_detection = 1;
assigned_ignored_det = true;
}
}
if(valid_detection==NO_DETECTION && ignored_gt[i]==0) {
stat.fn++;
}
else if(valid_detection!=NO_DETECTION && (ignored_gt[i]==1 || ignored_det[det_idx]==1))
assigned_detection[det_idx] = true;
else if(valid_detection!=NO_DETECTION){
stat.tp++;
stat.v.push_back(det[det_idx].thresh);
if(compute_aos)
delta.push_back(gt[i].box.alpha - det[det_idx].box.alpha);
assigned_detection[det_idx] = true;
}
}
if(compute_fp){
for(int32_t i=0; i<det.size(); i++){
if(!(assigned_detection[i] || ignored_det[i]==-1 || ignored_det[i]==1 || ignored_threshold[i]))
stat.fp++;
}
int32_t nstuff = 0;
for(int32_t i=0; i<dc.size(); i++){
for(int32_t j=0; j<det.size(); j++){
if(assigned_detection[j])
continue;
if(ignored_det[j]==-1 || ignored_det[j]==1)
continue;
if(ignored_threshold[j])
continue;
double overlap = boxoverlap(det[j], dc[i], 0);
if(overlap>MIN_OVERLAP[metric][current_class]){
assigned_detection[j] = true;
nstuff++;
}
}
}
stat.fp -= nstuff;
if(compute_aos){
vector<double> tmp;
tmp.assign(stat.fp, 0);
for(int32_t i=0; i<delta.size(); i++)
tmp.push_back((1.0+cos(delta[i]))/2.0);
assert(tmp.size()==stat.fp+stat.tp);
assert(delta.size()==stat.tp);
if(stat.tp>0 || stat.fp>0)
stat.similarity = accumulate(tmp.begin(), tmp.end(), 0.0);
else
stat.similarity = -1;
}
}
return stat;
}
bool eval_class (FILE *fp_det, FILE *fp_ori, CLASSES current_class,
const vector< vector<tGroundtruth> > &groundtruth,
const vector< vector<tDetection> > &detections, bool compute_aos,
double (*boxoverlap)(tDetection, tGroundtruth, int32_t),
vector<double> &precision, vector<double> &aos,
DIFFICULTY difficulty, METRIC metric) {
assert(groundtruth.size() == detections.size());
int32_t n_gt=0;
vector<double> v, thresholds;
vector< vector<int32_t> > ignored_gt, ignored_det;
vector< vector<tGroundtruth> > dontcare;
for (int32_t i=0; i<groundtruth.size(); i++){
vector<int32_t> i_gt, i_det;
vector<tGroundtruth> dc;
cleanData(current_class, groundtruth[i], detections[i], i_gt, dc, i_det, n_gt, difficulty);
ignored_gt.push_back(i_gt);
ignored_det.push_back(i_det);
dontcare.push_back(dc);
tPrData pr_tmp = tPrData();
pr_tmp = computeStatistics(current_class, groundtruth[i], detections[i], dc, i_gt, i_det, false, boxoverlap, metric);
for(int32_t j=0; j<pr_tmp.v.size(); j++)
v.push_back(pr_tmp.v[j]);
}
thresholds = getThresholds(v, n_gt);
vector<tPrData> pr;
pr.assign(thresholds.size(),tPrData());
for (int32_t i=0; i<groundtruth.size(); i++){
for(int32_t t=0; t<thresholds.size(); t++){
tPrData tmp = tPrData();
tmp = computeStatistics(current_class, groundtruth[i], detections[i], dontcare[i],
ignored_gt[i], ignored_det[i], true, boxoverlap, metric,
compute_aos, thresholds[t], t==38);
pr[t].tp += tmp.tp;
pr[t].fp += tmp.fp;
pr[t].fn += tmp.fn;
if(tmp.similarity!=-1)
pr[t].similarity += tmp.similarity;
}
}
vector<double> recall;
precision.assign(N_SAMPLE_PTS, 0);
if(compute_aos)
aos.assign(N_SAMPLE_PTS, 0);
double r=0;
for (int32_t i=0; i<thresholds.size(); i++){
r = pr[i].tp/(double)(pr[i].tp + pr[i].fn);
recall.push_back(r);
precision[i] = pr[i].tp/(double)(pr[i].tp + pr[i].fp);
if(compute_aos)
aos[i] = pr[i].similarity/(double)(pr[i].tp + pr[i].fp);
}
for (int32_t i=0; i<thresholds.size(); i++){
precision[i] = *max_element(precision.begin()+i, precision.end());
if(compute_aos)
aos[i] = *max_element(aos.begin()+i, aos.end());
}
saveStats(precision, aos, fp_det, fp_ori);
return true;
}
float* saveAndPlotPlots(string dir_name,string file_name,string obj_type,vector<double> vals[],bool is_aos){
char command[1024];
FILE *fp = fopen((dir_name + "/" + file_name + ".txt").c_str(),"w");
printf("save %s\n", (dir_name + "/" + file_name + ".txt").c_str());
for (int32_t i=0; i<(int)N_SAMPLE_PTS; i++)
fprintf(fp,"%f %f %f %f\n",(double)i/(N_SAMPLE_PTS-1.0),vals[0][i],vals[1][i],vals[2][i]);
fclose(fp);
float sum[3] = {0, 0, 0};
static float results[3] = {0, 0, 0};
for (int v = 0; v < 3; v++)
for (int i = 1; i < vals[v].size(); i++)
sum[v] += vals[v][i];
for (int i = 0; i < 3; i++)
results[i] = sum[i] / (N_SAMPLE_PTS-1.0) * 100;
printf("%s AP: %f %f %f\n", file_name.c_str(), sum[0] / (N_SAMPLE_PTS-1.0) * 100, sum[1] / (N_SAMPLE_PTS-1.0) * 100, sum[2] / (N_SAMPLE_PTS-1.0) * 100);
for (int32_t j=0; j<2; j++) {
FILE *fp = fopen((dir_name + "/" + file_name + ".gp").c_str(),"w");
if (j==0) {
fprintf(fp,"set term png size 450,315 font \"Helvetica\" 11\n");
fprintf(fp,"set output \"%s.png\"\n",file_name.c_str());
} else {
fprintf(fp,"set term postscript eps enhanced color font \"Helvetica\" 20\n");
fprintf(fp,"set output \"%s.eps\"\n",file_name.c_str());
}
fprintf(fp,"set size ratio 0.7\n");
fprintf(fp,"set xrange [0:1]\n");
fprintf(fp,"set yrange [0:1]\n");
fprintf(fp,"set xlabel \"Recall\"\n");
if (!is_aos) fprintf(fp,"set ylabel \"Precision\"\n");
else fprintf(fp,"set ylabel \"Orientation Similarity\"\n");
obj_type[0] = toupper(obj_type[0]);
fprintf(fp,"set title \"%s\"\n",obj_type.c_str());
int32_t lw = 5;
if (j==0) lw = 3;
fprintf(fp,"plot ");
fprintf(fp,"\"%s.txt\" using 1:2 title 'Easy' with lines ls 1 lw %d,",file_name.c_str(),lw);
fprintf(fp,"\"%s.txt\" using 1:3 title 'Moderate' with lines ls 2 lw %d,",file_name.c_str(),lw);
fprintf(fp,"\"%s.txt\" using 1:4 title 'Hard' with lines ls 3 lw %d",file_name.c_str(),lw);
fclose(fp);
sprintf(command,"cd %s; gnuplot %s",dir_name.c_str(),(file_name + ".gp").c_str());
system(command);
}
sprintf(command,"cd %s; ps2pdf %s.eps %s_large.pdf",dir_name.c_str(),file_name.c_str(),file_name.c_str());
system(command);
sprintf(command,"cd %s; pdfcrop %s_large.pdf %s.pdf",dir_name.c_str(),file_name.c_str(),file_name.c_str());
system(command);
sprintf(command,"cd %s; rm %s_large.pdf",dir_name.c_str(),file_name.c_str());
system(command);
return results;
}
vector<int32_t> getEvalIndices(const string& result_dir) {
DIR* dir;
dirent* entity;
dir = opendir(result_dir.c_str());
if (dir) {
while (entity = readdir(dir)) {
string path(entity->d_name);
int32_t len = path.size();
if (len < 10) continue;
int32_t index = atoi(path.substr(len - 10, 10).c_str());
indices.push_back(index);
}
}
return indices;
}
bool eval(string gt_dir, string result_dir, Mail* mail){
initGlobals();
string plot_dir = result_dir + "/plot";
system(("mkdir " + plot_dir).c_str());
vector< vector<tGroundtruth> > groundtruth;
vector< vector<tDetection> > detections;
bool compute_aos=true;
vector<bool> eval_image(NUM_CLASS, false);
vector<bool> eval_ground(NUM_CLASS, false);
vector<bool> eval_3d(NUM_CLASS, false);
mail->msg("Loading detections...");
std::vector<int32_t> indices = getEvalIndices(result_dir + "/data/");
printf("number of files for evaluation: %d\n", (int)indices.size());
for (int32_t i=0; i<indices.size(); i++) {
char file_name[256];
sprintf(file_name,"%06d.txt",indices.at(i));
bool gt_success,det_success;
vector<tGroundtruth> gt = loadGroundtruth(gt_dir + "/" + file_name,gt_success);
vector<tDetection> det = loadDetections(result_dir + "/data/" + file_name,
compute_aos, eval_image, eval_ground, eval_3d, det_success);
groundtruth.push_back(gt);
detections.push_back(det);
if (!gt_success) {
mail->msg("ERROR: Couldn't read: %s of ground truth. Please write me an email!", file_name);
return false;
}
if (!det_success) {
mail->msg("ERROR: Couldn't read: %s", file_name);
return false;
}
}
mail->msg(" done.");
FILE *fp_det=0, *fp_ori=0;
FILE *fp = fopen((result_dir + "/result.txt").c_str(),"w");
float * results;
fprintf(fp,"eval image 2D bounding boxes\n");
for (int c = 0; c < NUM_CLASS; c++) {
CLASSES cls = (CLASSES)c;
if (eval_image[c]) {
fp_det = fopen((result_dir + "/stats_" + CLASS_NAMES[c] + "_detection.txt").c_str(), "w");
if(compute_aos)
fp_ori = fopen((result_dir + "/stats_" + CLASS_NAMES[c] + "_orientation.txt").c_str(),"w");
vector<double> precision[3], aos[3];
if( !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, imageBoxOverlap, precision[0], aos[0], EASY, IMAGE)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, imageBoxOverlap, precision[1], aos[1], MODERATE, IMAGE)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, imageBoxOverlap, precision[2], aos[2], HARD, IMAGE)) {
mail->msg("%s evaluation failed.", CLASS_NAMES[c].c_str());
return false;
}
fclose(fp_det);
results = saveAndPlotPlots(plot_dir, CLASS_NAMES[c] + "_detection", CLASS_NAMES[c], precision, 0);
fprintf(fp,"%s AP: %f %f %f\n",CLASS_NAMES[c].c_str(), results[0], results[1], results[2]);
if(compute_aos){
results = saveAndPlotPlots(plot_dir, CLASS_NAMES[c] + "_orientation", CLASS_NAMES[c], aos, 1);
fprintf(fp,"%s AP: %f %f %f\n",CLASS_NAMES[c].c_str(), results[0], results[1], results[2]);
fclose(fp_ori);
}
}
}
compute_aos = false;
fprintf(fp,"\neval bird's eye view bounding boxes\n");
for (int c = 0; c < NUM_CLASS; c++) {
CLASSES cls = (CLASSES)c;
if (eval_ground[c]) {
fp_det = fopen((result_dir + "/stats_" + CLASS_NAMES[c] + "_detection_ground.txt").c_str(), "w");
vector<double> precision[3], aos[3];
if( !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, groundBoxOverlap, precision[0], aos[0], EASY, GROUND)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, groundBoxOverlap, precision[1], aos[1], MODERATE, GROUND)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, groundBoxOverlap, precision[2], aos[2], HARD, GROUND)) {
mail->msg("%s evaluation failed.", CLASS_NAMES[c].c_str());
return false;
}
fclose(fp_det);
results = saveAndPlotPlots(plot_dir, CLASS_NAMES[c] + "_detection_ground", CLASS_NAMES[c], precision, 0);
fprintf(fp,"%s AP: %f %f %f\n",CLASS_NAMES[c].c_str(), results[0], results[1], results[2]);
}
}
fprintf(fp,"\neval 3D bounding boxes\n");
for (int c = 0; c < NUM_CLASS; c++) {
CLASSES cls = (CLASSES)c;
if (eval_3d[c]) {
fp_det = fopen((result_dir + "/stats_" + CLASS_NAMES[c] + "_detection_3d.txt").c_str(), "w");
vector<double> precision[3], aos[3];
if( !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, box3DOverlap, precision[0], aos[0], EASY, BOX3D)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, box3DOverlap, precision[1], aos[1], MODERATE, BOX3D)
|| !eval_class(fp_det, fp_ori, cls, groundtruth, detections, compute_aos, box3DOverlap, precision[2], aos[2], HARD, BOX3D)) {
mail->msg("%s evaluation failed.", CLASS_NAMES[c].c_str());
return false;
}
fclose(fp_det);
results = saveAndPlotPlots(plot_dir, CLASS_NAMES[c] + "_detection_3d", CLASS_NAMES[c], precision, 0);
fprintf(fp,"%s AP: %f %f %f\n",CLASS_NAMES[c].c_str(), results[0], results[1], results[2]);
}
}
fclose(fp);
printf("\n##################################################\n");
FILE *fp_print = fopen((result_dir + "/result.txt").c_str(),"r");
char c;
while(fscanf(fp_print,"%c",&c)!=EOF)
printf("%c",c);
fclose(fp_print);
printf("\n##################################################\n");
return true;
}
int32_t main (int32_t argc,char *argv[]) {
if (argc!=3) {
cout << "Usage: ./eval_detection_3d_offline gt_dir result_dir" << endl;
return 1;
}
string gt_dir = argv[1];
string result_dir = argv[2];
Mail *mail;
mail = new Mail();
mail->msg("Thank you for participating in our evaluation!");
if (eval(gt_dir, result_dir, mail)) {
mail->msg("Your evaluation results are available at:");
mail->msg(result_dir.c_str());
} else {
system(("rm -r " + result_dir + "/plot").c_str());
mail->msg("An error occured while processing your results.");
}
delete mail;
return 0;
}
6 注意
1) AP_R11与AP_R40的选择
不知道大家有没有注意到KITTI官网下面有这么一句话:
Note 2: On 08.10.2019, we have followed the suggestions of the Mapillary team in their paper Disentangling Monocular 3D Object Detection and use 40 recall positions instead of the 11 recall positions proposed in the original Pascal VOC benchmark. This results in a more fair comparison of the results, please check their paper. The last leaderboards right before this change can be found here: Object Detection Evaluation, 3D Object Detection Evaluation, Bird’s Eye View Evaluation.
在上面的 代码部分,saveAndPlotPlots函数里面有这么一段:
float sum[3] = {0, 0, 0};
static float results[3] = {0, 0, 0};
for (int v = 0; v < 3; v++)
for (int i = 1; i < vals[v].size(); i++)
sum[v] += vals[v][i];
for (int i = 0; i < 3; i++)
results[i] = sum[i] / (N_SAMPLE_PTS-1.0) * 100;
printf("%s AP: %f %f %f\n", file_name.c_str(), sum[0] / (N_SAMPLE_PTS-1.0) * 100, sum[1] / (N_SAMPLE_PTS-1.0) * 100, sum[2] / (N_SAMPLE_PTS-1.0) * 100);
而这是用于40个点的插值得到的mAP代码,如果想得11点插值采样的结果,可以改为下面的代码:(只改这里,其他地方不用改)
float sum[3] = {0, 0, 0};
static float results[3] = {0, 0, 0};
for (int v = 0; v < 3; v++)
for (int i = 0; i < vals[v].size(); i=i+4)
sum[v] += vals[v][i];
for (int i = 0; i < 3; i++)
results[i] = sum[i] / 11 * 100;
printf("%s AP: %f %f %f\n", file_name.c_str(), sum[0] / 11 * 100, sum[1] / 11 * 100, sum[2] / 11 * 100);
亲自动手一遍,相信你也知道它大致是怎么计算的了。
2) MIN_OVERLAP的选择
在 evaluate_object.cpp文件里有这么一行代码。
const double MIN_OVERLAP[3][3] = {{0.7, 0.5, 0.5}, {0.5, 0.25, 0.25}, {0.5, 0.25, 0.25}};
使用第一行IOU threshold的结果比第二行要好一些,一些paper也是用的第一行但没有告诉读者,我一开始用的默认第二行,导致我怀疑自己的评估文件,emmm
========== 后期补充:
7 救苦救难的Python验证代码
只想说 靠(一个动作)!牛!代码我放在我的GitHub与gitee上面,内网外网均可到达。地址:
1. https://github.com/fyancy/kitti_evaluation_codes
2. https://gitee.com/fyancy/kitti_evaluation_codes
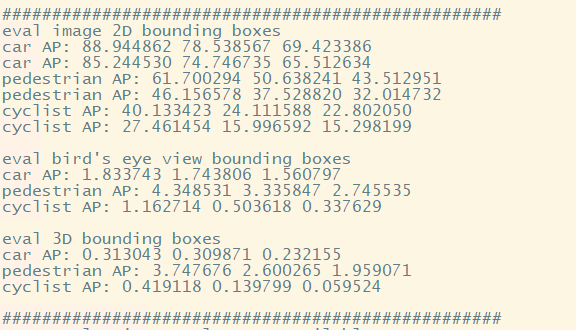
下面贴出c++代码与OpenPCDet的python代码的比较结果(有误差,但问题不大):
C++iou=0.540点插值采样


OpenPCDetiou=0.540点插值采样
****Car AP_R40@0.70, 0.50, 0.50:
bbox AP:90.5915, 78.5379, 69.4228
bev AP:26.3483, 21.1817, 18.4874
3d AP:13.1477, 11.7556, 9.7749
aos AP:86.79, 74.75, 65.51
****Pedestrian AP_R40@0.50, 0.25, 0.25:
bbox AP:61.7003, 50.6382, 43.5130
bev AP:15.4725, 12.9547, 11.2692
3d AP:14.6865, 12.1036, 9.8097
aos AP:46.16, 37.53, 32.01
****Cyclist AP_R40@0.50, 0.25, 0.25:
bbox AP:40.1334, 24.1116, 22.8021
bev AP:9.2079, 4.3063, 4.2338
3d AP:8.5029, 4.0998, 3.6177
aos AP:27.46, 16.00, 15.30
C++iou=0.740点插值采样
OpenPCDetiou=0.740点插值采样
****Car AP_R40@0.70, 0.70, 0.70:
bbox AP:90.5915, 78.5379, 69.4228
bev AP:1.8337, 1.7438, 1.5608
3d AP:0.3130, 0.3099, 0.2322
aos AP:86.79, 74.75, 65.51
****Pedestrian AP_R40@0.50, 0.50, 0.50:
bbox AP:61.7003, 50.6382, 43.5130
bev AP:4.3485, 3.3358, 2.7455
3d AP:3.7477, 2.6003, 1.9591
aos AP:46.16, 37.53, 32.01
****Cyclist AP_R40@0.50, 0.50, 0.50:
bbox AP:40.1334, 24.1116, 22.8021
bev AP:1.1627, 0.5036, 0.3376
3d AP:0.4191, 0.1398, 0.0595
aos AP:27.46, 16.00, 15.30
C++iou=0.511点插值采样
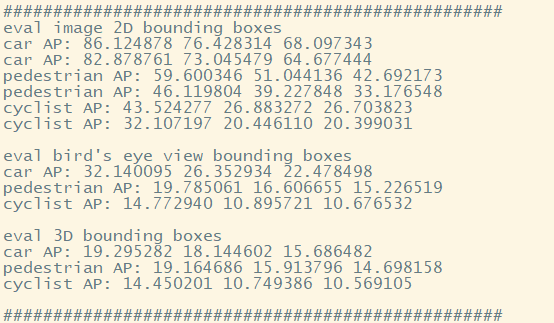
OpenPCDetiou=0.511点插值采样
####Car AP@0.70, 0.50, 0.50:
bbox AP:86.1249, 76.4279, 68.0968
bev AP:32.1401, 26.3529, 22.4785
3d AP:19.2953, 18.1446, 15.6865
aos AP:82.88, 73.04, 64.68
####Pedestrian AP@0.50, 0.25, 0.25:
bbox AP:59.6004, 51.0441, 42.6922
bev AP:19.7851, 16.6067, 15.2265
3d AP:19.1647, 15.9138, 14.6982
aos AP:46.12, 39.23, 33.18
####Cyclist AP@0.50, 0.25, 0.25:
bbox AP:43.5243, 26.8833, 26.7038
bev AP:14.7729, 10.8957, 10.6765
3d AP:14.4502, 10.7494, 10.5691
aos AP:32.11, 20.45, 20.40
Original: https://blog.csdn.net/weixin_43543177/article/details/123057861
Author: 燕策西
Title: KITTI数据集评估方法小结
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/680811/
转载文章受原作者版权保护。转载请注明原作者出处!