

yolov5-realsense深度信息目标检测(构建自己的数据集模型)
训练准备:
1.安装运行yolov5代码
略
2.制作训练数据集
目标训练数据集,应大于50张图片以上
(1) 使用OpenCV拍摄640X480(32倍数)(相机尺寸)的图片并保存
import cv2
cap=cv2.VideoCapture(0)
width = 640
height = 480
cap.set(cv2.CAP_PROP_FRAME_WIDTH, width)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, height)
i=0
while(1):
ret ,frame = cap.read()
k=cv2.waitKey(1)
if k==27:
break
elif k==ord('s'):
cv2.imwrite('/home/user/cxking/project/yolo/yolov5训练数据及/img/'+str(i)+'.jpg',frame)
i+=1
cv2.imshow("capture", frame)
cap.release()
cv2.destroyAllWindows()
选取等宽高图片:
square (w==h)
如 输入为 [b, c, 640, 640], 可以使用mosic数据增强方式增强图像
rect(scale):
如 输入为 [b, c, 640, 512], 其中512为短边放缩以后的尺寸(补充到32的倍数)
但是不支持mosic数据增强方式
32倍数:
yolov5s第一层结构FOCUS切片操作最后使用了32个卷积核的卷积操作
数据集展示:

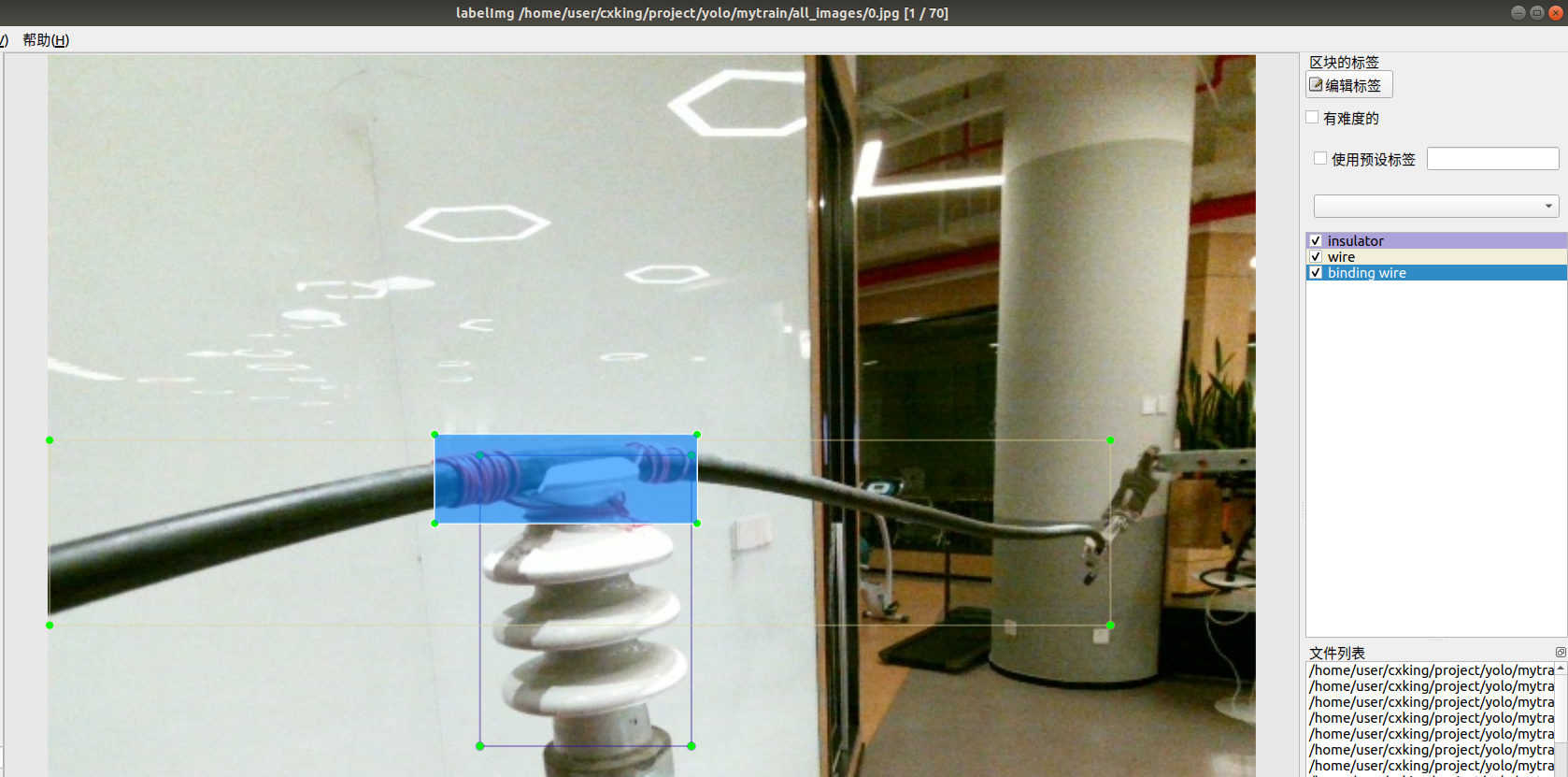
(2) 安装图片标注工具LabelImg
https://github.com/tzutalin/labelImg
pip3 install labelImg
labelImg
labelImg [IMAGE_PATH] [PRE-DEFINED CLASS FILE]
操作快捷键:
Ctrl + u 加载目录中的所有图像,鼠标点击Open dir同功能
Ctrl + r 更改默认注释目标目录(xml文件保存的地址)
Ctrl + s 保存
Ctrl + d 复制当前标签和矩形框
space 将当前图像标记为已验证
w 创建一个矩形框
d 下一张图片
a 上一张图片
del 删除选定的矩形框
Ctrl++ 放大
Ctrl-- 缩小
↑→↓← 键盘箭头移动选定的矩形框
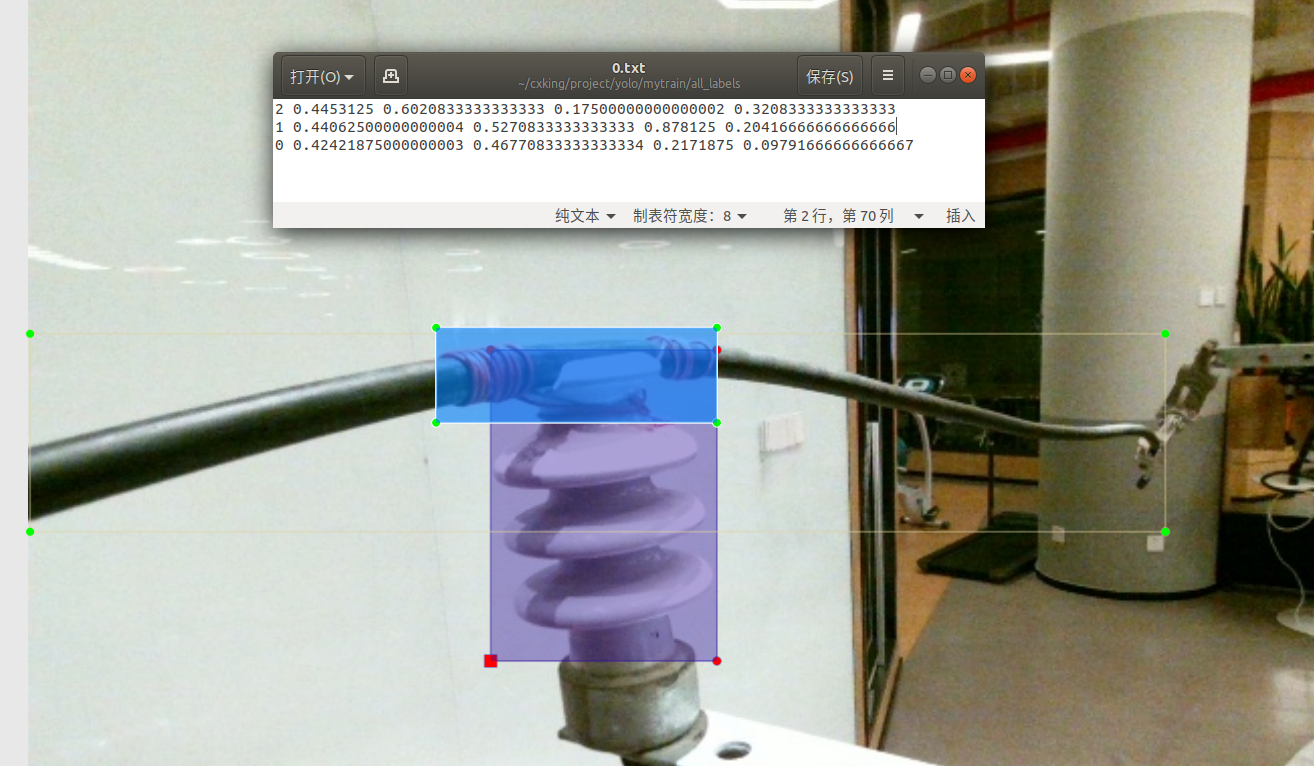
标注操作:

生成图片 xlm 文件:
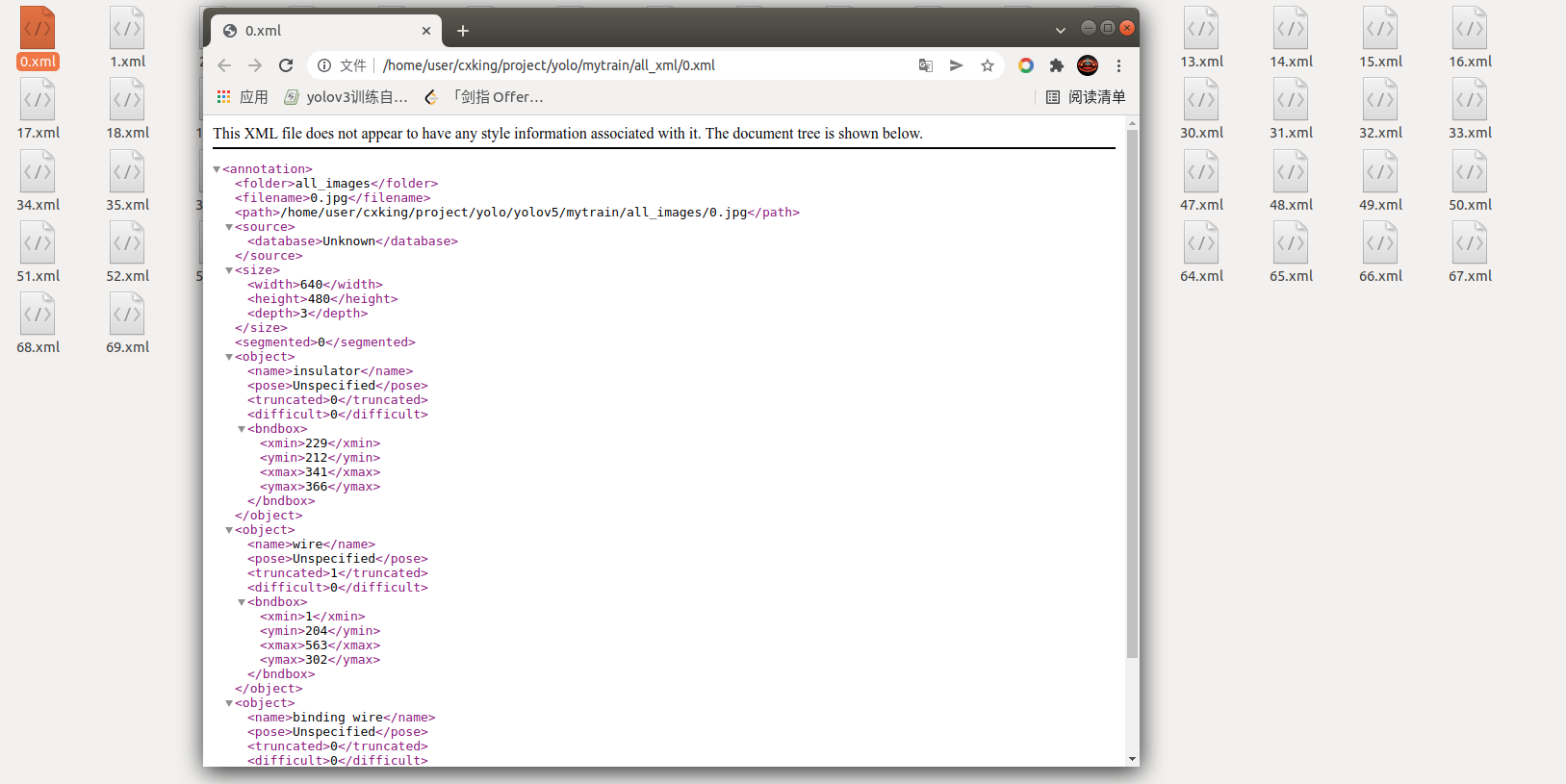
标签解析:
<annotation> ##Annotations:里面存放的是每张图片打完标签所对应的XML文件
<folder>all_imagesfolder>
<filename>0.jpgfilename> ##图片名
<path>/home/user/cxking/project/yolo/yolov5/mytrain/all_images/0.jpgpath>
<source>
<database>Unknowndatabase>
source>
<size> ##图片尺寸
<width>640width>
<height>480height>
<depth>3depth> #RGB3色
size>
<segmented>0segmented>
<object> ##图片标注目标
<name>insulatorname> #标注目标类别
<pose>Unspecifiedpose> #物体的姿态
<truncated>0truncated> #物体是否被部分遮挡(>15%)
<difficult>0difficult> #是否为难以辨识的物体,主要指要结体背景才能判断出类别的物体。虽有标注, # 但一般忽略这类物体
<bndbox> ##标注的bbox左上角和右下角坐标
<xmin>229xmin>
<ymin>212ymin>
<xmax>341xmax>
<ymax>366ymax>
bndbox>
object>
<object>
<name>wirename> #第二个标注类别名
<pose>Unspecifiedpose>
<truncated>1truncated> ##被遮挡超过15%
<difficult>0difficult>
<bndbox>
<xmin>1xmin>
<ymin>204ymin>
<xmax>563xmax>
<ymax>302ymax>
bndbox>
object>
<object>
<name>binding wirename> #第三个标记类别
<pose>Unspecifiedpose>
<truncated>0truncated>
<difficult>0difficult>
<bndbox>
<xmin>202xmin>
<ymin>201ymin>
<xmax>341xmax>
<ymax>248ymax>
bndbox>
object>
annotation>
注意:若存在同类别多个标注,则每个类别的独立标注都会有一个
(3) 生成训练数据集
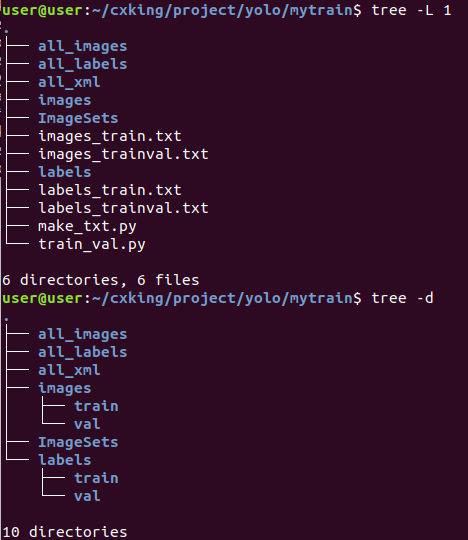
- 构建训练集文件结构:
其中:
mytrain
├── all_images:存放所有图片;
├── all_xml:放置生成的所有与训练图片对应的xml文件;
├── all_labels:由文件train_val.py生成,将all_xml中xml文件转为txt文件存于all_labels文件夹中,并生成训练需要的架构;
├── make_txt.py:用来划分数据集,生成四个只包含图片名称的txt文件;
└── train_val.py:该文件一方面将all_xml中xml文件转为txt文件存于all_labels文件夹中,另一方面生成训练所需数据存放架构;
- 设定数据集中训练和测试比例并进行划分:( make_txt.py)
import os
import random
trainval_percent = 0.1
train_percent = 0.9
xmlfilepath = 'all_images'
txtsavepath = 'ImageSets'
total_xml = os.listdir(xmlfilepath)
num = len(total_xml)
list = range(num)
tv = int(num * trainval_percent)
tr = int(tv * train_percent)
trainval = random.sample(list, tv)
train = random.sample(trainval, tr)
if not os.path.exists('ImageSets/'):
os.makedirs('ImageSets/')
ftrainval = open('ImageSets/trainval.txt', 'w')
ftest = open('ImageSets/test.txt', 'w')
ftrain = open('ImageSets/train.txt', 'w')
fval = open('ImageSets/val.txt', 'w')
for i in list:
name = total_xml[i][:-4] + '\n'
if i in trainval:
ftrainval.write(name)
if i in train:
ftest.write(name)
else:
fval.write(name)
else:
ftrain.write(name)
ftrainval.close()
ftrain.close()
fval.close()
ftest.close()
* 生成模型需要的数据集存放架构:( train_val.py) 该文件一方面将all_xml中xml文件转为txt文件存于all_labels文件夹中,另一方面生成训练所需数据存放架构
import xml.etree.ElementTree as ET
import pickle
import os
import shutil
from os import listdir, getcwd
from os.path import join
sets = ['train', 'trainval']
classes = ['binding wire','wire','insulator']
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def convert_annotation(image_id):
in_file = open('all_xml/%s.xml' % (image_id))
out_file = open('all_labels/%s.txt' % (image_id), 'w')
tree = ET.parse(in_file)
root = tree.getroot()
size = root.find('size')
w = int(size.find('width').text)
h = int(size.find('height').text)
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult) == 1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (float(xmlbox.find('xmin').text), float(xmlbox.find('xmax').text), float(xmlbox.find('ymin').text),
float(xmlbox.find('ymax').text))
bb = convert((w, h), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
wd = getcwd()
print(wd)
for image_set in sets:
if not os.path.exists('all_labels/'):
os.makedirs('all_labels/')
image_ids = open('ImageSets/%s.txt' % (image_set)).read().strip().split()
image_list_file = open('images_%s.txt' % (image_set), 'w')
labels_list_file=open('labels_%s.txt'%(image_set),'w')
for image_id in image_ids:
image_list_file.write('%s.jpg\n' % (image_id))
labels_list_file.write('%s.txt\n'%(image_id))
convert_annotation(image_id)
image_list_file.close()
labels_list_file.close()
def copy_file(new_path,path_txt,search_path):
if not os.path.exists(new_path):
os.makedirs(new_path)
with open(path_txt, 'r') as lines:
filenames_to_copy = set(line.rstrip() for line in lines)
for root, _, filenames in os.walk(search_path):
for filename in filenames:
if filename in filenames_to_copy:
shutil.copy(os.path.join(root, filename), new_path)
copy_file('./images/train/','./images_train.txt','./all_images')
copy_file('./images/val/','./images_trainval.txt','./all_images')
copy_file('./labels/train/','./labels_train.txt','./all_labels')
copy_file('./labels/val/','./labels_trainval.txt','./all_labels')
* 制作自定义数据集的yaml文件:( mytrain.yaml) 接着按照yolov5-master/data/coco128.yaml文件,制作mytrain.yaml文件(与coco128.yaml文件同目录):
( YAML是一种标记语言,也可称为资源清单文件。可以实现对大量的资源对象进行编排部署,是一种基于Unicode容易阅读,容易和脚本语言交互的,用来表达资料序列的编程语言。)
train: ../mytrain/images/train/
val: ../mytrain/images/val/
nc: 3
names: ['binding wire','wire','insulator']
训练数据集 :( train.py )
更改train.py文件相应的参数(预训练模型,训练的数据集),这里使用yolov5s.pt为预训练模型,更改yolov5s.yaml文件中的参数(自己的类别数):
def parse_opt(known=False):
parser = argparse.ArgumentParser()
parser.add_argument('--weights', type=str, default=ROOT / 'yolov5s.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
parser.add_argument('--data', type=str, default=ROOT / 'data/mytrain.yaml', help='dataset.yaml path')
parser.add_argument('--hyp', type=str, default=ROOT / 'data/hyps/hyp.scratch.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs, -1 for autobatch')
parser.add_argument('--imgsz', '--img', '--img-size', type=int, default=640, help='train, val image size (pixels)')
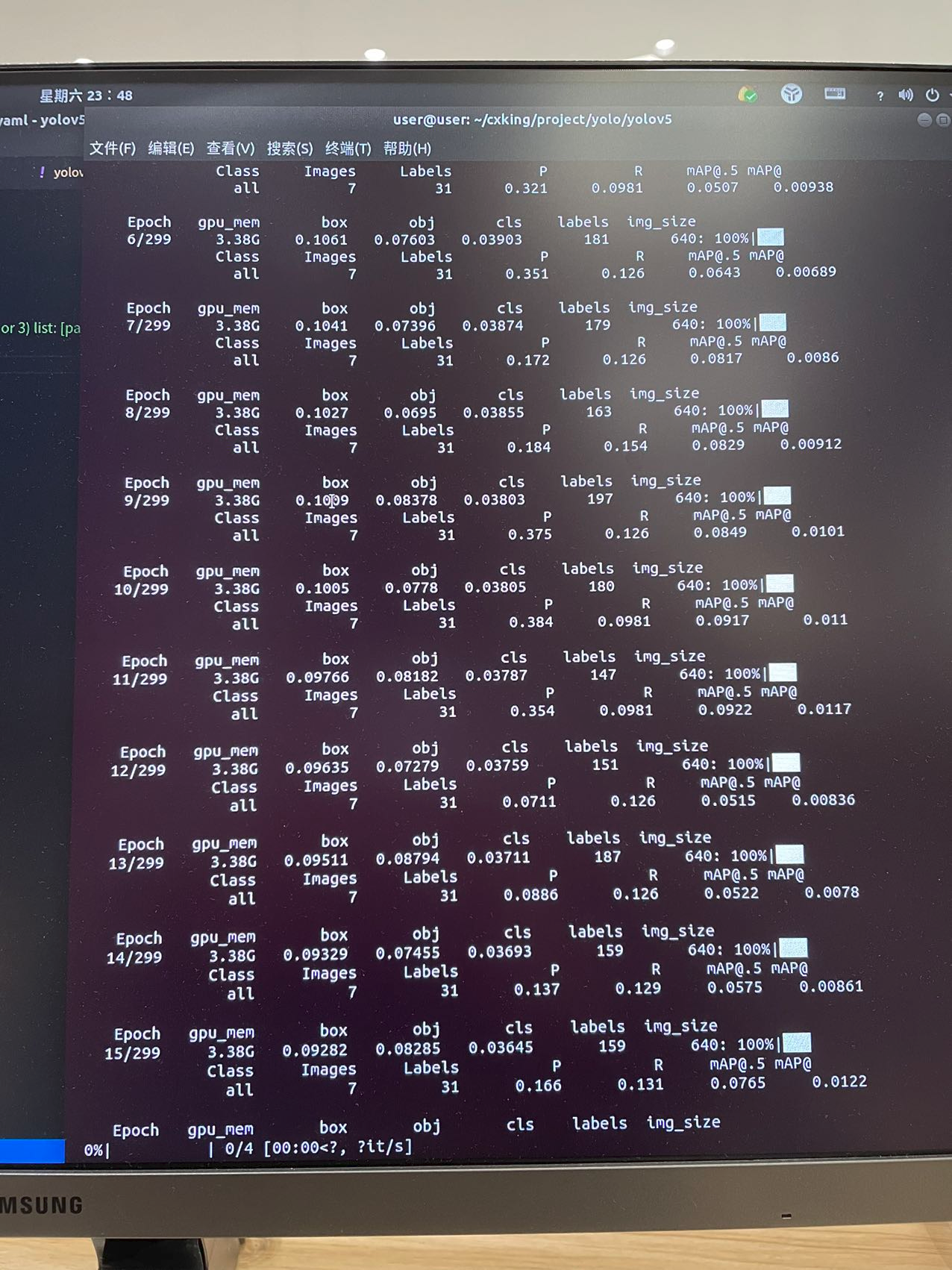
- 训练结果分析:(/yolov5/runs/train/)
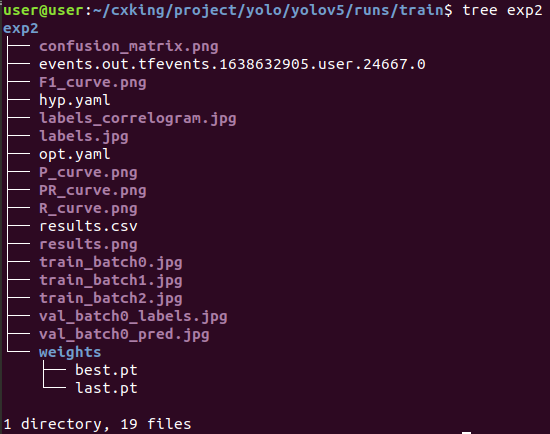
训练完以后可以看到在runs/train/exp/weights下生成了训练好的权重文件包含best.pt(做detect时用这个)和last.pt(最后一次训练模型),其中last.pt主要是用来在上次程序中断之后,下次可以继续接着进行训练。
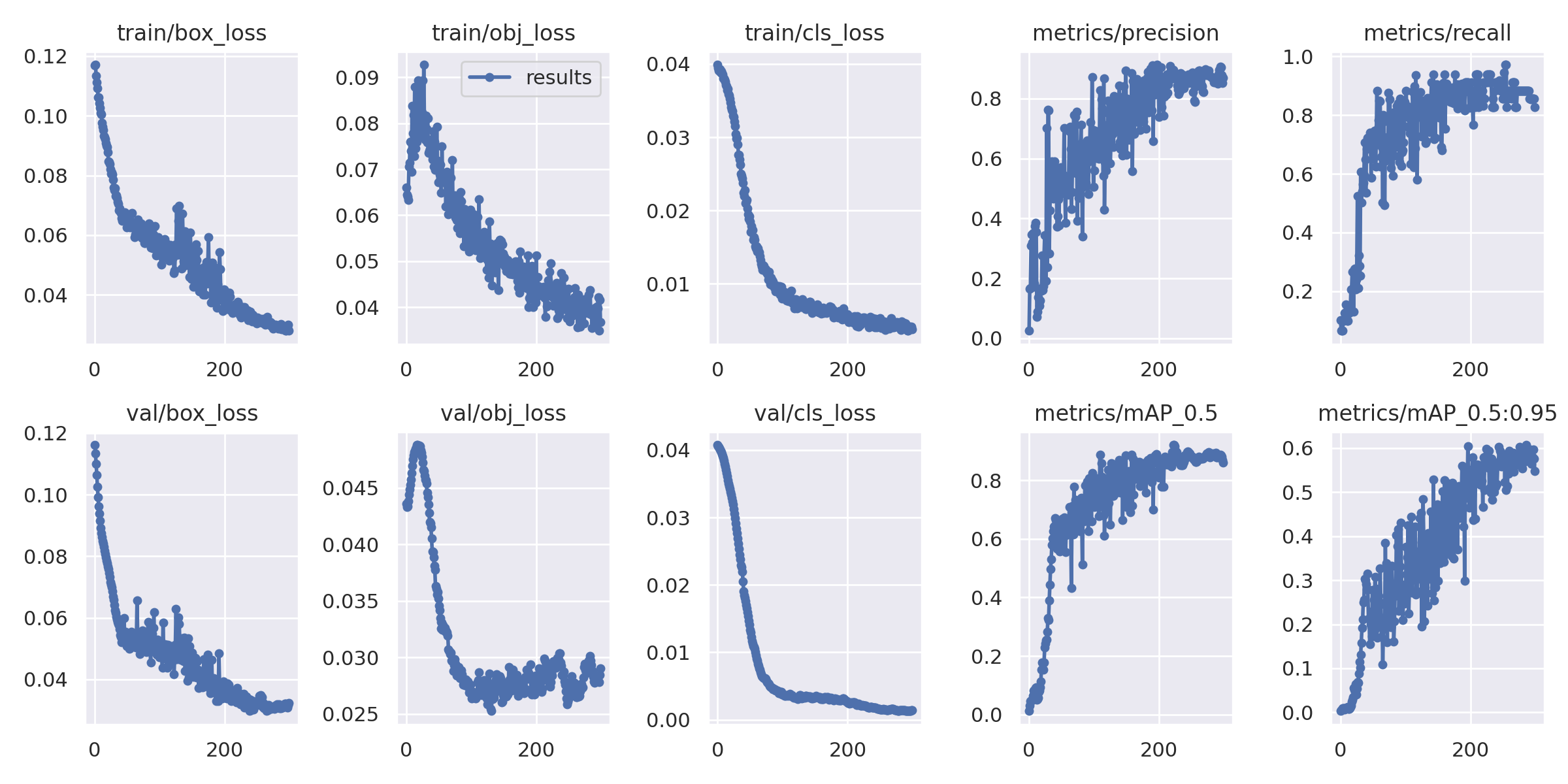
方法:大体观察个损失是否收敛稳定,主要观察 precision精度和 recall召回率;
- GIoU:推测为GIoU损失函数均值,越小方框越准;
- Objectness:推测为目标检测loss均值,越小目标检测越准;
- Classification:推测为分类loss均值,越小分类越准;
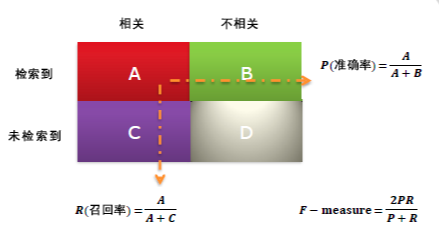
- Precision:精度( 找对的正类/所有找到的正类);
- Recall:召回率( 找对的正类/所有本应该被找对的正类);
- mAP@0.5 & mAP@0.5:0.95:就是mAP是用Precision和Recall作为两轴作图后围成的面积,m表示平均,@后面的数表示判定iou为正负样本的阈值,@0.5:0.95表示阈值取0.5:0.05:0.95后取均值。
- F-measure:F值定义为’精度’和’召回率’的调和平均,F值较高的时候说明试验方法有效,结果比较符合预期;
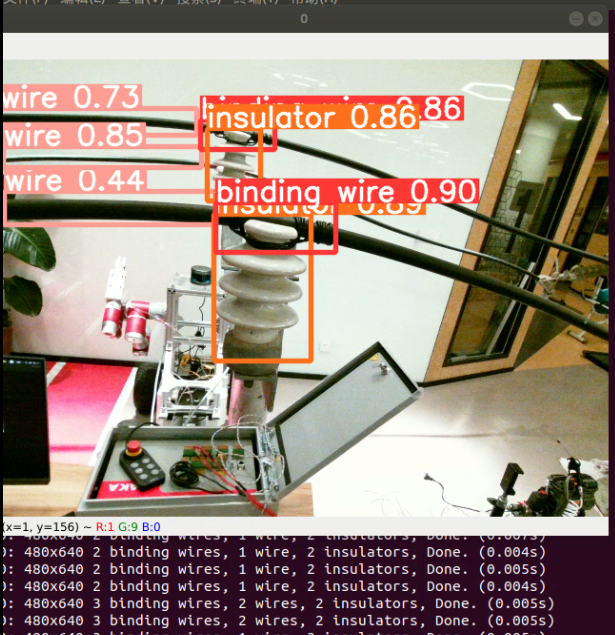
测试训练模型 :(detect.py)
用训练好的权重文件进行测试,修改detect.py文件,修改权重文件路径和输入测试文件,然后run:
def parse_opt():
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default=ROOT / '/home/user/cxking/project/yolo/yolov5/runs/train/exp2/weights/best.pt', help='model path(s)')
parser.add_argument('--source', type=str, default=ROOT / 'data/images', help='file/dir/URL/glob, 0 for webcam')
parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w')
执行: python detect.py --source 0
应用:结合realsense相机的sdk实现目标检测加测距(realsensedetect.py)
结合源码的detect.py文件改编:
分别对一下模块进行修改和添加:
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1)
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA)
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def set_logging(name=None, verbose=True):
rank = int(os.getenv('RANK', -1))
logging.basicConfig(format="%(message)s", level=logging.INFO if (verbose and rank in (-1, 0)) else logging.WARNING)
return logging.getLogger(name)
LOGGER = set_logging(__name__)
def load_classifier(name='resnet101', n=2):
model = torchvision.models.__dict__[name](pretrained=True)
filters = model.fc.weight.shape[1]
model.fc.bias = nn.Parameter(torch.zeros(n), requires_grad=True)
model.fc.weight = nn.Parameter(torch.zeros(n, filters), requires_grad=True)
model.fc.out_features = n
return model
def time_synchronized():
torch.cuda.synchronize() if torch.cuda.is_available() else None
return time.time()
import argparse
import os
import shutil
import time
from pathlib import Path
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
import numpy as np
import pyrealsense2 as rs
from models.experimental import attempt_load
from utils.general import (
check_img_size, non_max_suppression, apply_classifier, scale_coords,
xyxy2xywh, plot_one_box, strip_optimizer, set_logging)
from utils.torch_utils import select_device, load_classifier, time_synchronized
from utils.datasets import letterbox
def detect(save_img=False):
out, source, weights, view_img, save_txt, imgsz = \
opt.save_dir, opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
webcam = source == '0' or source.startswith(('rtsp://', 'rtmp://', 'http://')) or source.endswith('.txt')
set_logging()
device = select_device(opt.device)
if os.path.exists(out):
shutil.rmtree(out)
os.makedirs(out)
half = device.type != 'cpu'
model = attempt_load(weights, map_location=device)
imgsz = check_img_size(imgsz, s=model.stride.max())
if half:
model.half()
vid_path, vid_writer = None, None
view_img = True
cudnn.benchmark = True
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]
t0 = time.time()
img = torch.zeros((1, 3, imgsz, imgsz), device=device)
_ = model(img.half() if half else img) if device.type != 'cpu' else None
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16,30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8,30)
pipeline.start(config)
align_to_color = rs.align(rs.stream.color)
while True:
start = time.time()
frames = pipeline.wait_for_frames()
frames = align_to_color.process(frames)
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
color_image = np.asanyarray(color_frame.get_data())
depth_image = np.asanyarray(depth_frame.get_data())
mask = np.zeros([color_image.shape[0], color_image.shape[1]], dtype=np.uint8)
mask[0:480, 320:640] = 255
sources = [source]
imgs = [None]
path = sources
imgs[0] = color_image
im0s = imgs.copy()
img = [letterbox(x, new_shape=imgsz)[0] for x in im0s]
img = np.stack(img, 0)
img = img[:, :, :, ::-1].transpose(0, 3, 1, 2)
img = np.ascontiguousarray(img, dtype=np.float16 if half else np.float32)
img /= 255.0
img = torch.from_numpy(img).to(device)
if img.ndimension() == 3:
img = img.unsqueeze(0)
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
for i, det in enumerate(pred):
p, s, im0 = path[i], '%g: ' % i, im0s[i].copy()
s += '%gx%g ' % img.shape[2:]
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]]
if det is not None and len(det):
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum()
s += '%g %ss, ' % (n, names[int(c)])
for *xyxy, conf, cls in reversed(det):
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist()
line = (cls, conf, *xywh) if opt.save_conf else (cls, *xywh)
distance_list = []
mid_pos = [int((int(xyxy[0]) + int(xyxy[2])) / 2), int((int(xyxy[1]) + int(xyxy[3])) / 2)]
min_val = min(abs(int(xyxy[2]) - int(xyxy[0])), abs(int(xyxy[3]) - int(xyxy[1])))
randnum = 40
for i in range(randnum):
bias = random.randint(-min_val // 4, min_val // 4)
dist = depth_frame.get_distance(int(mid_pos[0] + bias), int(mid_pos[1] + bias))
if dist:
distance_list.append(dist)
distance_list = np.array(distance_list)
distance_list = np.sort(distance_list)[
randnum // 2 - randnum // 4:randnum // 2 + randnum // 4]
label = '%s %.2f%s' % (names[int(cls)], np.mean(distance_list), 'm')
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
print('%sDone. (%.3fs)' % (s, t2 - t1))
if view_img:
cv2.imshow(p, im0)
if cv2.waitKey(1) == ord('q'):
raise StopIteration
print('Done. (%.3fs)' % (time.time() - t0))
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='/home/user/cxking/project/yolo/yolov5/runs/train/exp2/weights/best.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='inference/images', help='source')
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-dir', type=str, default='inference/output', help='directory to save results')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
opt = parser.parse_args()
print(opt)
with torch.no_grad():
detect()
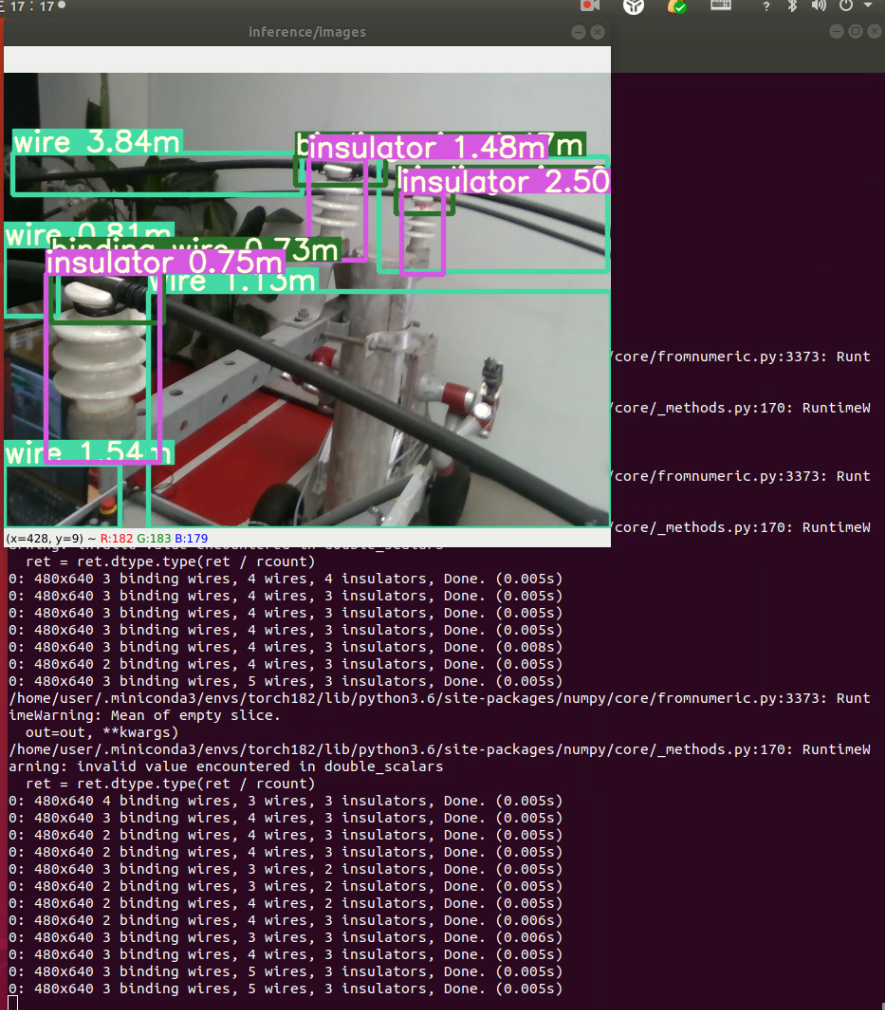
效果展示:
Original: https://blog.csdn.net/qq_41669874/article/details/121801478
Author: 小凯的学徒生涯
Title: yolov5-realsense深度信息目标检测(构建自己的数据集模型)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/680263/
转载文章受原作者版权保护。转载请注明原作者出处!