

限制因素
人脸识别
- 复杂场景:比如多人物,多元素
- 表情变化
- 光照变化
- 年龄变化
- 姿态变化
图像相减通常用于在生产线上检测缺失的元件。方法是存储一幅对应于正确组装的”金”图像;然后,从相同产品的传入图像中减去该图像。理想情况下,如果新产品组装正确,则差值应为零。对于缺失元件的产品,在不同于金图像的位置,差值图像将不为零。在实际中,您认为在什么条件下使用这种方法工作才是合适的?(习题2.22)
(1)元件:相机与元件应对齐,确保每幅图像的元件位置一样。
(2)相机、最好是统一型号的相机和相同的配置下成像。流水线上要考虑成像相机停留的时间。
(3)光源:需要一个稳定的光源,光强变化尽可能小,同时保证成像的视场要一致,照明方式相同。光照合适且均匀。
(4)噪声值应低到不影响差值:差分图像的噪声内容需要足够低,确保它不会对”金”图像和输入信息之间的比较产生实质性影响。
(5)厂房内环境,保证一个无尘的环境,同时湿温度要保持在一定范围内,还有避免电磁干扰影响成像。
(6)背景台应稳定,减少因设备运转的震动。
习题4.43 电子显微镜生成的某类图像,技术人员检查具有代表性的图像,发现如下问题:(1)不感兴趣的明亮的孤立点;(2)清晰度不够;(3)一些图像的对比度不够;(4)平均灰度值的改变(平均灰度值应该是V,以便进行正确的某种灰度测量)。(5)纠正上述问题后,用白色显示在I1和I2之间的灰度,其余灰度保持正常色调。请提出一种处理方案,技术人员可以按照该步骤达到目的。
答:(1)中值滤波,把明亮且孤立的点过滤掉。
(2)Sobel 或者复合拉普拉斯算子锐化滤波,增强清晰度。
(3)线性变换,通过对比度拉伸增强对比度,并且调整灰度值到指定值。或者用直方图均衡化处理图像。
(4)计算处理之前原图像的平均灰度值K0和处理后图像的平均灰度值K1, 设 ,将处理后图像的每个像素灰度值加上 。
图像增强
灰度变换
灰度反转


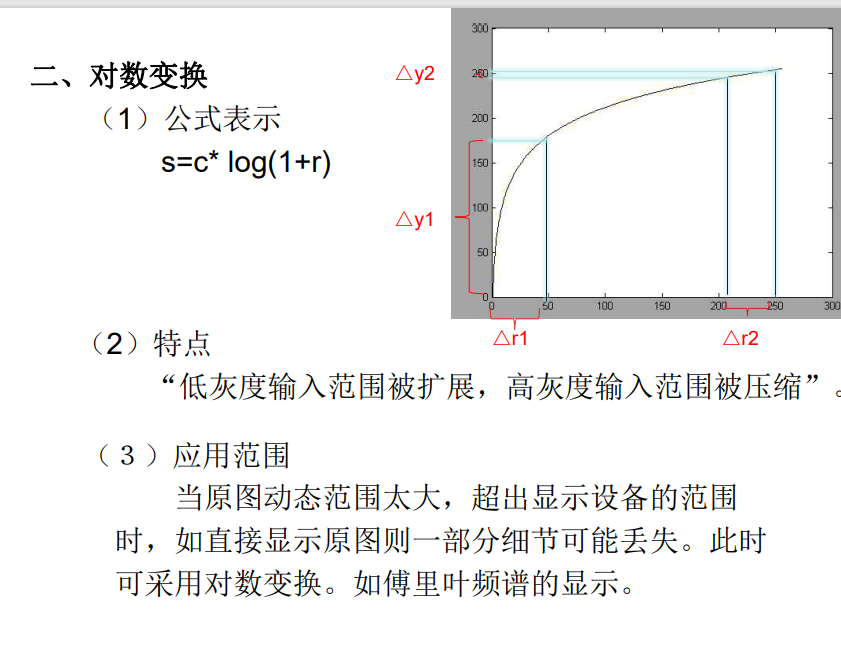
; 对数变换
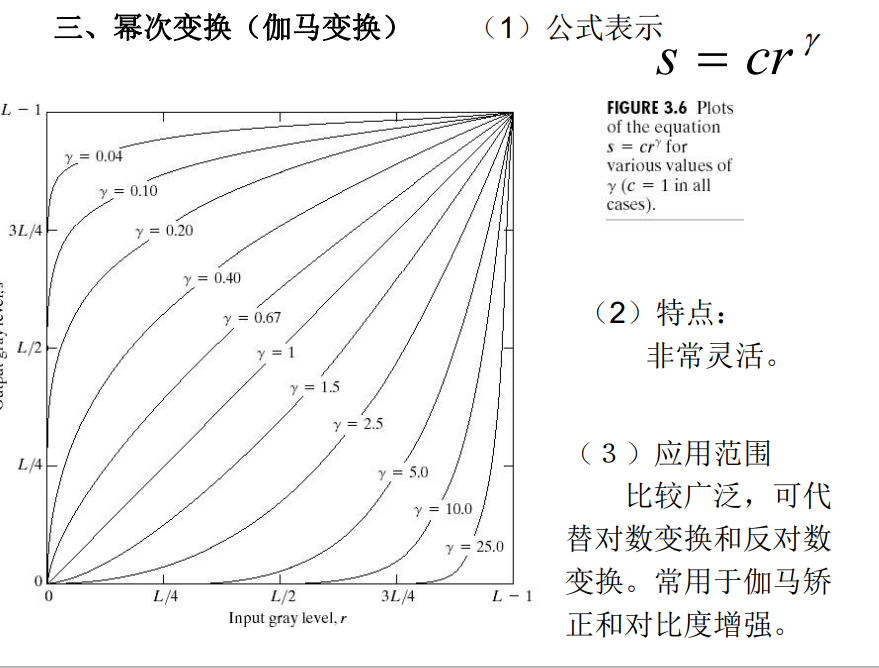
伽马变换
; 对比度拉伸
压缩两端的背景的动态范围
扩展中段的目标的动态范围

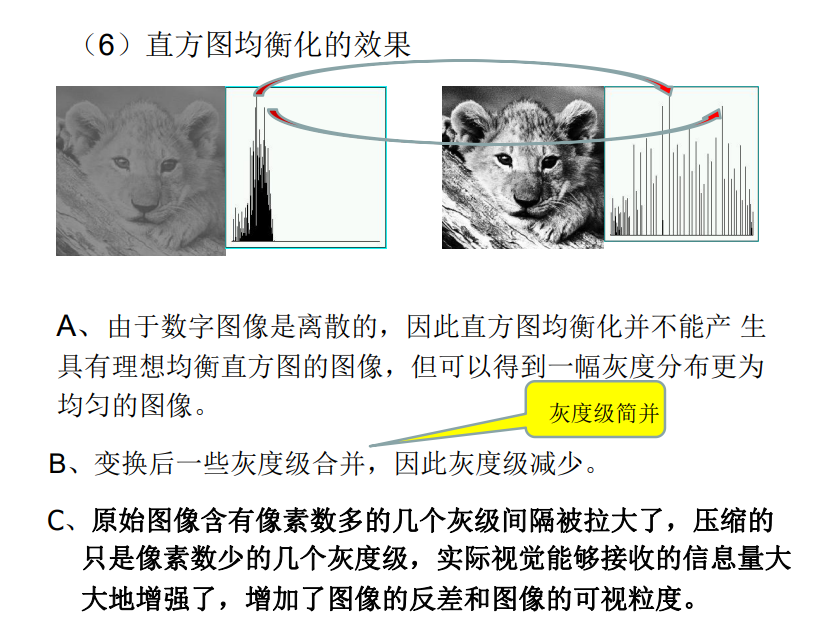
直方图处理
; 空间滤波器
空间线性滤波器
滤波器含有系数,每点的响应由滤波器系数与滤波模板扫过的相应像素值的乘积之和给出
- 均值滤波器:抑制噪声,模糊图像, 适合高斯噪声(平滑空间滤波器)
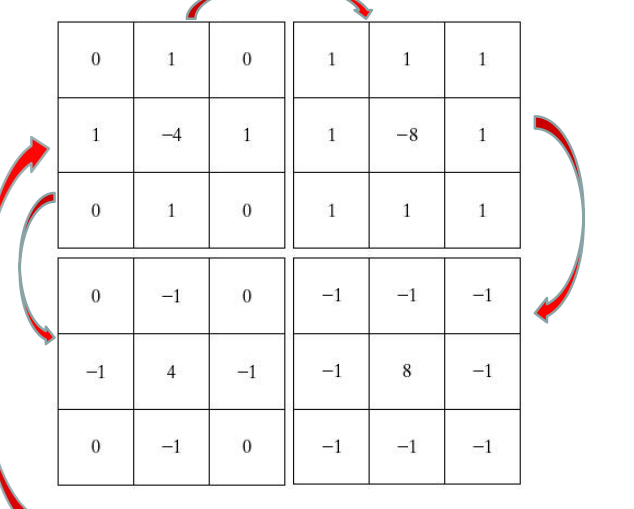
- 由于拉普拉斯 对噪声敏感且产生双边缘,可用复合拉普拉斯算子。
; 空间非线性滤波器
(该模板没有滤波器系数),每点的响应取决于所考虑的邻域像素的值
- 中值滤波器:与均值相比,抑制噪声的时候能更好保持图像细节, 适合椒盐噪声(平滑空间滤波器)
- 更好抑制噪声而保持细节的,可以用k近邻平滑滤波器
图像分割
区域之间–基于灰度不连续性(间断检测)
点检测
- 用锐化滤波器(高通滤波器),以及阈值化来孤立点
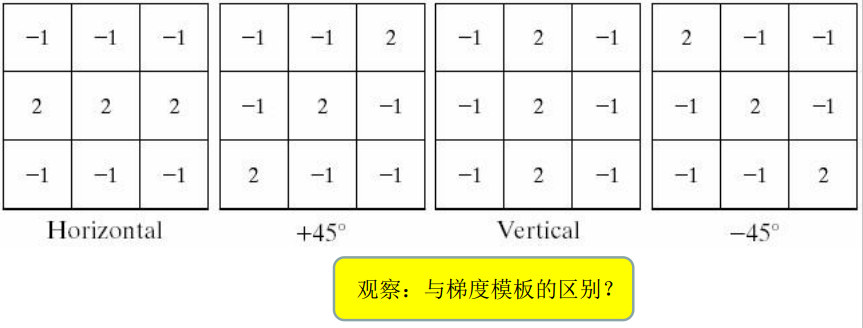
; 线检测
- 基于拉普拉斯模板的线检测
边缘检测
- 要注意,噪声对一阶、二阶导数有影响,即对边缘检测有很大影响,所以在检测边缘的时候要先平滑处理。
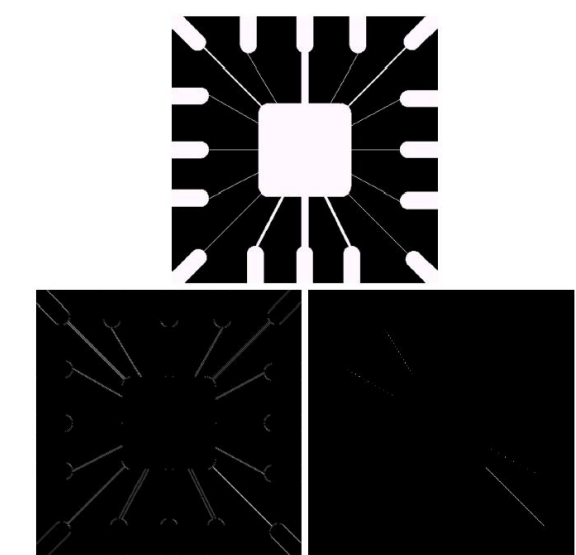
- 由于梯度是某像素点灰度变化最大的方向,该方向与边缘方向垂直,所以可通过各种梯度模板找边缘。
; 区域内部–基于区域的图像分割
- 基于区域生长的方法进行区域内的图像分割
- 区域的分裂与合并(画四叉树)
基于灰度不连续性和灰度连续性(阈值处理)
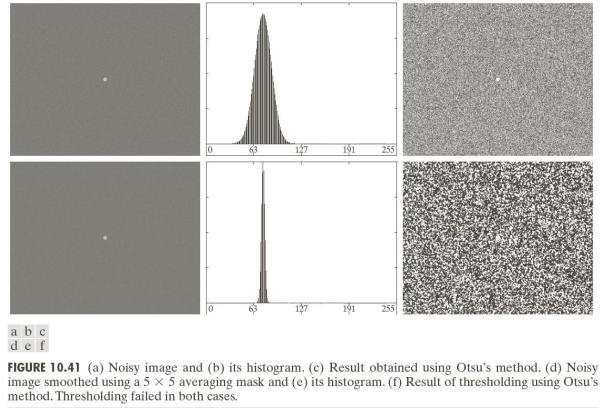
阈值分割受到 噪声和光照不均匀的影响
- 对于噪声的处理,可以先平滑滤波再阈值处理。这第二行就是平滑后的。
- 对于光照不均匀,可以:
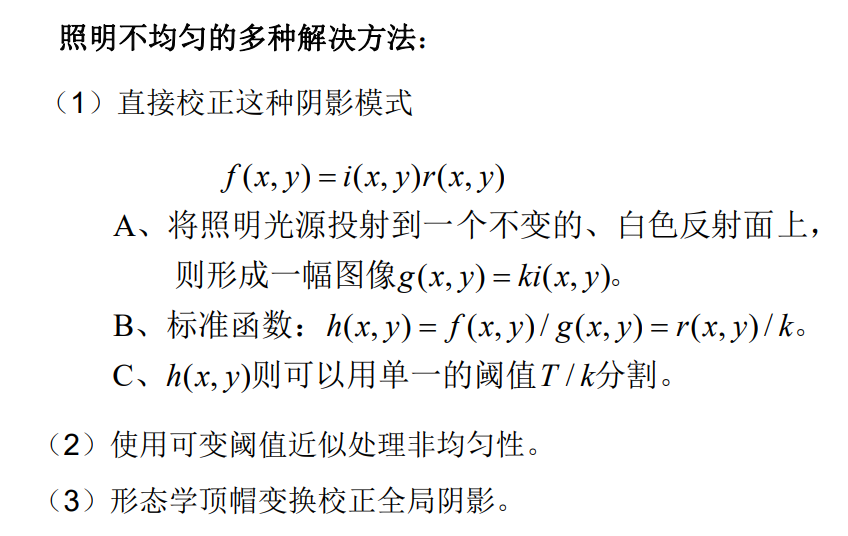
- 可以只考虑边缘附近的像素,这里可以用梯度和拉普拉斯算子等(拉普拉斯更好),利用边缘图像,来更好进行 全局阈值处理。
- 阈值处理分为:全局阈值,可变阈值(图像分块)、局部阈值(图像特性、移动平均等)
Original: https://blog.csdn.net/Hiyu_/article/details/121962106
Author: Eyeui
Title: 数字图像处理概念分类
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/664615/
转载文章受原作者版权保护。转载请注明原作者出处!