

1.软件版本
matlab2021a
2.系统概述
这里,采用的pointnet网络结构如下图所示:
在整体网络结构中,
首先进行set abstraction,这一部分主要即对点云中的点进行局部划分,提取整体特征,如图可见,在set abstraction中,主要有Sampling layer、Grouping layer、以及PointNet layer三层构成,sampling layer即完成提取中心点工作,采用fps算法,而在grouping中,即完成group操作,采用mrg或msg方法,最后对于提取出得点,使用pointnet进行特征提取。在msg中,第一层set abstraction取中心点512个,半径分别为0.1、0.2、0.4,每个圈内的最大点数为16,32,128。
Sampling layer
采样层在输入点云中选择一系列点,由此定义出局部区域的中心。采样算法使用迭代最远点采样方法 iterative farthest point sampling(FPS)。先随机选择一个点,然后再选择离这个点最远的点作为起点,再继续迭代,直到选出需要的个数为止相比随机采样,能更完整得通过区域中心点采样到全局点云
Grouping layer
目的是要构建局部区域,进而提取特征。思想就是利用临近点,并且论文中使用的是neighborhood ball,而不是KNN,是因为可以保证有一个fixed region scale,主要的指标还是距离distance。
Pointnet layer
在如何对点云进行局部特征提取的问题上,利用原有的Pointnet就可以很好的提取点云的特征,由此在Pointnet++中,原先的Pointnet网络就成为了Pointnet++网络中的子网络,层级迭代提取特征。
3.部分核心程序
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
rng('default')
%****************************************************************************
%更多关于matlab和fpga的搜索“fpga和matlab”的CSDN博客:
%matlab/FPGA项目开发合作
%https://blog.csdn.net/ccsss22?type=blog
%****************************************************************************
dsTrain = PtCloudClassificationDatastore('train');
dsVal = PtCloudClassificationDatastore('test');
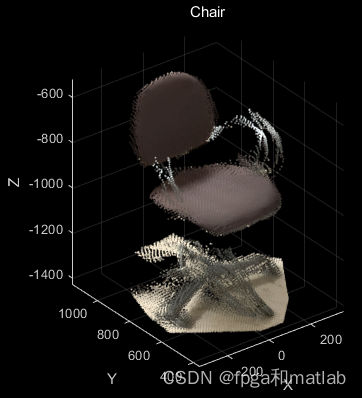
ptCloud = pcread('Chair.ply');
label = 'Chair';
figure;pcshow(ptCloud)
xlabel("X");ylabel("Y");zlabel("Z");title(label)
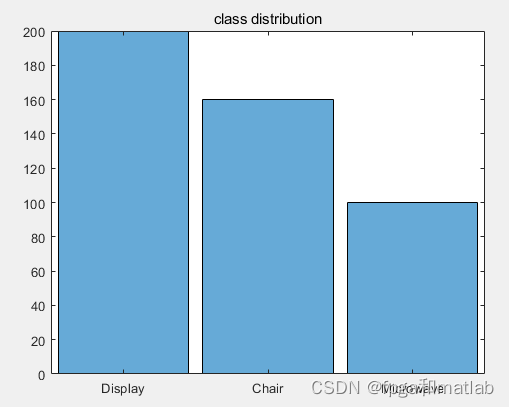
dsLabelCounts = transform(dsTrain,@(data){data{2} data{1}.Count});
labelCounts = readall(dsLabelCounts);
labels = vertcat(labelCounts{:,1});
counts = vertcat(labelCounts{:,2});
figure;histogram(labels);title('class distribution')
rng(0)
[G,classes] = findgroups(labels);
numObservations = splitapply(@numel,labels,G);
desiredNumObservationsPerClass = max(numObservations);
filesOverSample=[];
for i=1:numel(classes)
if i==1
targetFiles = {dsTrain.Files{1:numObservations(i)}};
else
targetFiles = {dsTrain.Files{numObservations(i-1)+1:sum(numObservations(1:i))}};
end
% Randomly replicate the point clouds belonging to the infrequent classes
files = randReplicateFiles(targetFiles,desiredNumObservationsPerClass);
filesOverSample = vertcat(filesOverSample,files');
end
dsTrain.Files=filesOverSample;
dsTrain.Files = dsTrain.Files(randperm(length(dsTrain.Files)));
dsTrain.MiniBatchSize = 32;
dsVal.MiniBatchSize = dsTrain.MiniBatchSize;
dsTrain = transform(dsTrain,@augmentPointCloud);
data = preview(dsTrain);
ptCloud = data{1,1};
label = data{1,2};
figure;pcshow(ptCloud.Location,[0 0 1],"MarkerSize",40,"VerticalAxisDir","down")
xlabel("X");ylabel("Y");zlabel("Z");title(label)
minPointCount = splitapply(@min,counts,G);
maxPointCount = splitapply(@max,counts,G);
meanPointCount = splitapply(@(x)round(mean(x)),counts,G);
stats = table(classes,numObservations,minPointCount,maxPointCount,meanPointCount)
numPoints = 1000;
dsTrain = transform(dsTrain,@(data)selectPoints(data,numPoints));
dsVal = transform(dsVal,@(data)selectPoints(data,numPoints));
dsTrain = transform(dsTrain,@preprocessPointCloud);
dsVal = transform(dsVal,@preprocessPointCloud);
data = preview(dsTrain);
figure;pcshow(data{1,1},[0 0 1],"MarkerSize",40,"VerticalAxisDir","down");
xlabel("X");ylabel("Y");zlabel("Z");title(data{1,2})
inputChannelSize = 3;
hiddenChannelSize1 = [64,128];
hiddenChannelSize2 = 256;
[parameters.InputTransform, state.InputTransform] = initializeTransform(inputChannelSize,hiddenChannelSize1,hiddenChannelSize2);
inputChannelSize = 3;
hiddenChannelSize = [64 64];
[parameters.SharedMLP1,state.SharedMLP1] = initializeSharedMLP(inputChannelSize,hiddenChannelSize);
inputChannelSize = 64;
hiddenChannelSize1 = [64,128];
hiddenChannelSize2 = 256;
[parameters.FeatureTransform, state.FeatureTransform] = initializeTransform(inputChannelSize,hiddenChannelSize,hiddenChannelSize2);
inputChannelSize = 64;
hiddenChannelSize = 64;
[parameters.SharedMLP2,state.SharedMLP2] = initializeSharedMLP(inputChannelSize,hiddenChannelSize);
inputChannelSize = 64;
hiddenChannelSize = [512,256];
numClasses = numel(classes);
[parameters.ClassificationMLP, state.ClassificationMLP] = initializeClassificationMLP(inputChannelSize,hiddenChannelSize,numClasses);
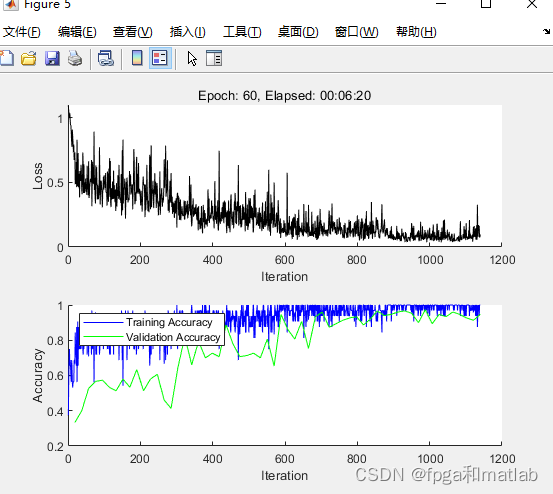
numEpochs = 60;
learnRate = 0.001;
l2Regularization = 0.1;
learnRateDropPeriod = 15;
learnRateDropFactor = 0.5;
gradientDecayFactor = 0.9;
squaredGradientDecayFactor = 0.999;
avgGradients = [];
avgSquaredGradients = [];
[lossPlotter, trainAccPlotter,valAccPlotter] = initializeTrainingProgressPlot;
% Number of classes
numClasses = numel(classes);
% Initialize the iterations
iteration = 0;
% To calculate the time for training
start = tic;
% Loop over the epochs
for epoch = 1:numEpochs
% Reset training and validation datastores.
reset(dsTrain);
reset(dsVal);
% Iterate through data set.
while hasdata(dsTrain) % if no data to read, exit the loop to start the next epoch
iteration = iteration + 1;
% Read data.
data = read(dsTrain);
% Create batch.
[XTrain,YTrain] = batchData(data,classes);
% Evaluate the model gradients and loss using dlfeval and the
% modelGradients function.
[gradients, loss, state, acc] = dlfeval(@modelGradients,XTrain,YTrain,parameters,state);
% L2 regularization.
gradients = dlupdate(@(g,p) g + l2Regularization*p,gradients,parameters);
% Update the network parameters using the Adam optimizer.
[parameters, avgGradients, avgSquaredGradients] = adamupdate(parameters, gradients, ...
avgGradients, avgSquaredGradients, iteration,learnRate,gradientDecayFactor, squaredGradientDecayFactor);
% Update the training progress.
D = duration(0,0,toc(start),"Format","hh:mm:ss");
title(lossPlotter.Parent,"Epoch: " + epoch + ", Elapsed: " + string(D))
addpoints(lossPlotter,iteration,double(gather(extractdata(loss))))
addpoints(trainAccPlotter,iteration,acc);
drawnow
end
% Create confusion matrix
cmat = sparse(numClasses,numClasses);
% Classify the validation data to monitor the tranining process
while hasdata(dsVal)
data = read(dsVal); % Get the next batch of data.
[XVal,YVal] = batchData(data,classes);% Create batch.
% Compute label predictions.
isTrainingVal = 0; %Set at zero for validation data
YPred = pointnetClassifier(XVal,parameters,state,isTrainingVal);
% Choose prediction with highest score as the class label for
% XTest.
[~,YValLabel] = max(YVal,[],1);
[~,YPredLabel] = max(YPred,[],1);
cmat = aggreateConfusionMetric(cmat,YValLabel,YPredLabel);% Update the confusion matrix
end
% Update training progress plot with average classification accuracy.
acc = sum(diag(cmat))./sum(cmat,"all");
addpoints(valAccPlotter,iteration,acc);
% Update the learning rate
if mod(epoch,learnRateDropPeriod) == 0
learnRate = learnRate * learnRateDropFactor;
end
reset(dsTrain); % Reset the training data since all the training data were already read
% Shuffle the data at every epoch
dsTrain.UnderlyingDatastore.Files = dsTrain.UnderlyingDatastore.Files(randperm(length(dsTrain.UnderlyingDatastore.Files)));
reset(dsVal);
end
cmat = sparse(numClasses,numClasses); % Prepare sparse-double variable to do like zeros(2,2)
reset(dsVal); % Reset the validation data
data = readall(dsVal); % Read all validation data
[XVal,YVal] = batchData(data,classes); % Create batch.
% Classify the validation data using the helper function pointnetClassifier
YPred = pointnetClassifier(XVal,parameters,state,isTrainingVal);
% Choose prediction with highest score as the class label for
% XTest.
[~,YValLabel] = max(YVal,[],1);
[~,YPredLabel] = max(YPred,[],1);
% Collect confusion metrics.
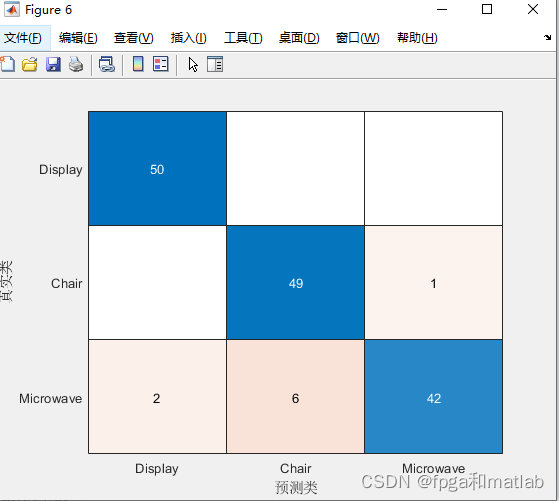
cmat = aggreateConfusionMetric(cmat,YValLabel,YPredLabel);
figure;chart = confusionchart(cmat,classes);
acc = sum(diag(cmat))./sum(cmat,"all")
4.仿真结论

5.参考文献
[1][1] Qi C R , Su H , Mo K , et al. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2017.资源同名下载
Original: https://blog.csdn.net/ccsss22/article/details/125434324
Author: fpga和matlab
Title: 【pointNet】基于pointNet的三维点云目标分类识别matlab仿真
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/662855/
转载文章受原作者版权保护。转载请注明原作者出处!