

【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境
【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境
【ROS&GAZEBO】多旋翼无人机仿真(二)——基于rotors的仿真
【ROS&GAZEBO】多旋翼无人机仿真(三)——自定义无人机模型
【ROS&GAZEBO】多旋翼无人机仿真(四)——探索控制器原理
【ROS&GAZEBO】多旋翼无人机仿真(五)——位置控制器
本人由于课题需要,研究了如何在ROS和GAZEBO环境中搭建多旋翼无人机可视化仿真环境,并且成功的 修改了仿真模型、对不同的机型进行了仿真、用ardupilot联合gazebo对自定义机型进行SITL仿真。为了记录这段经历,本人将其整理并分享给需要的伙伴们,欢迎大家互相交流!
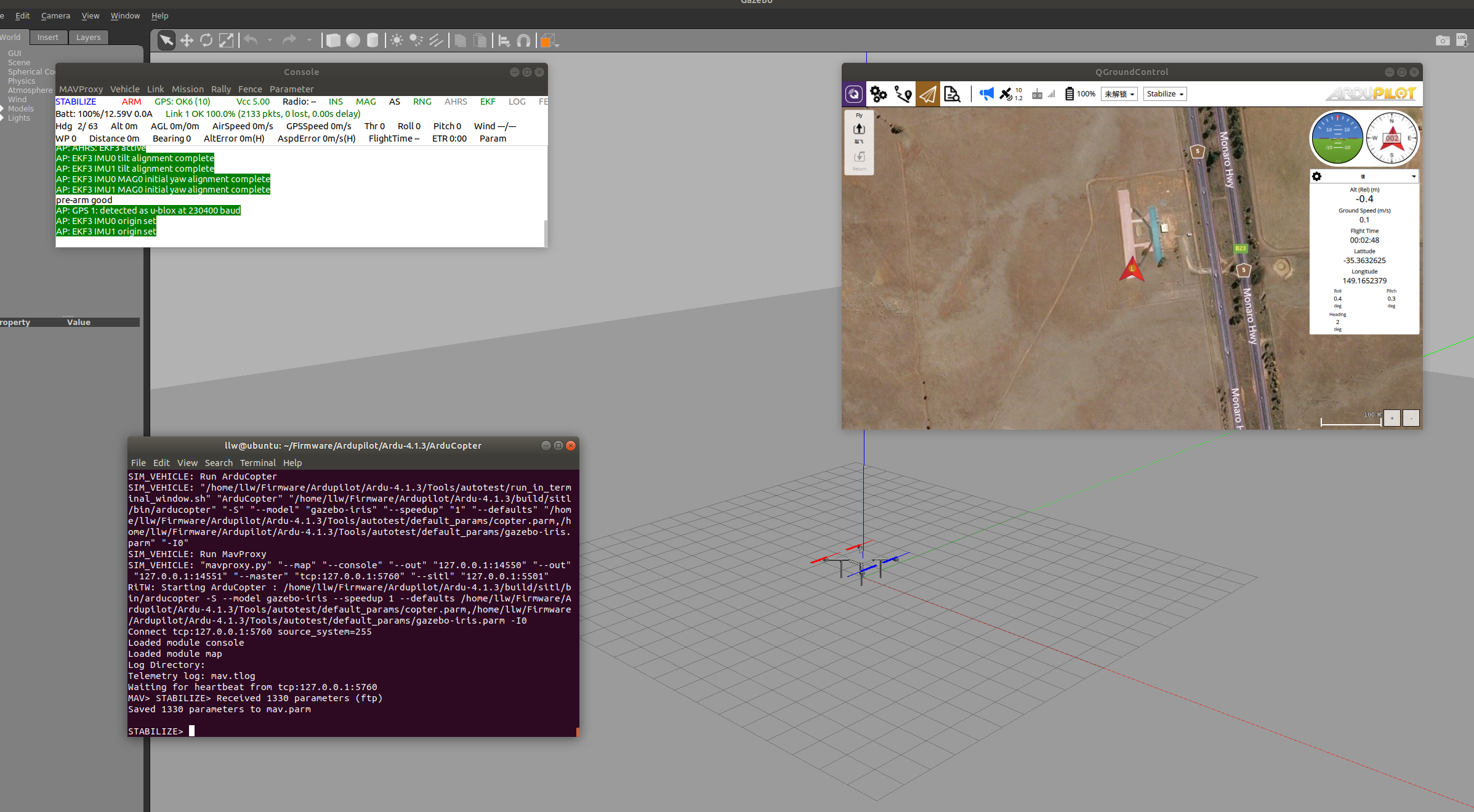
ardupilot、qgroundcontrol和自定义的四旋翼模型进行可视化仿真的效果图

; 仿真平台
首先,我仿真系统使用的是Ubuntu20.04(Ubuntu16.04和Ubuntu18.04也可以,但是仿真过程中会存在一些问题,因此我不建议使用)。
ROS&GAZEBO搭建
ROS搭建过程很简单,按照官网的教程步骤一步一步来就行了,这里ROS的版本不要选错了,使用 noetic版本的ROS和 GAZEBO-11
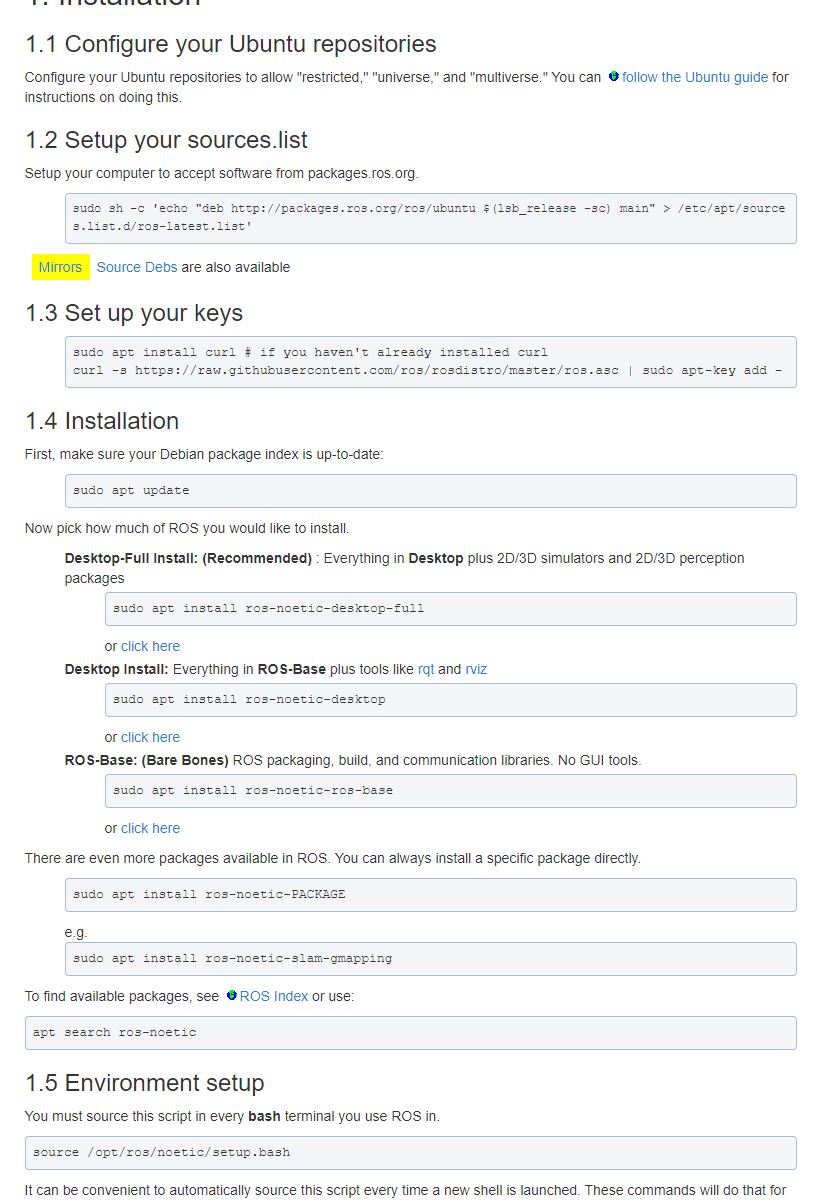
安装ROS时,选择 sudo apt install ros-noetic-desktop-full全套安装
最后一定要使用 sudo rosdep init和 rosdep update,运行 rosdep update时可能会出现超时的问题,参照解决方案
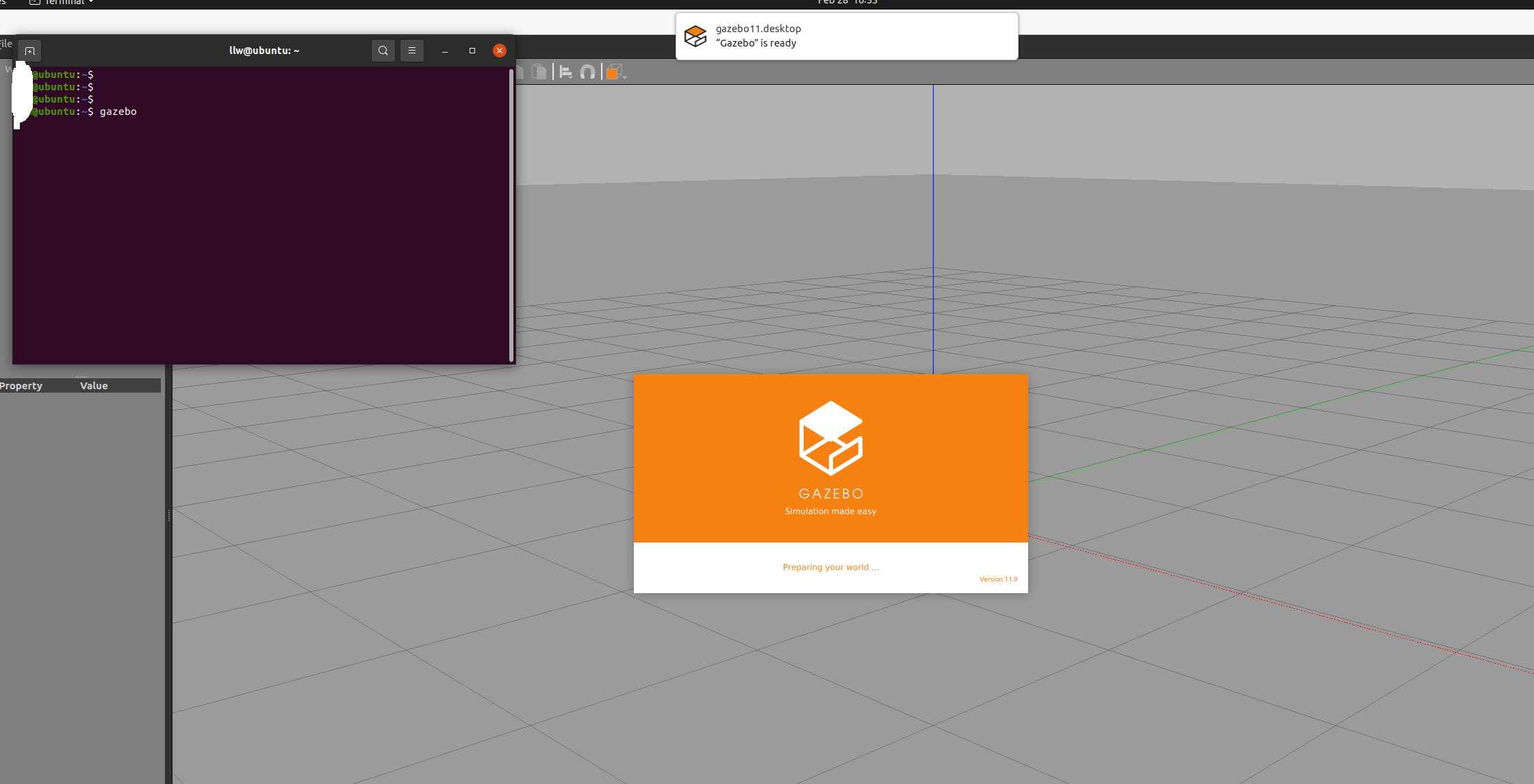
完成所有步骤之后,在桌面打开两个终端运行 roscore和 gazebo,若出现下面画面,显示的是 gazebo11,则说明安装成功,接下来就可以愉快的开始进行多旋翼仿真了
喜欢的朋友可以点个赞,关注微信公众号相互交流: Reed UAV
Original: https://blog.csdn.net/qq_37680545/article/details/123185002
Author: Reed Liao
Title: 【ROS&GAZEBO】多旋翼无人机仿真(一)——搭建仿真环境
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/649165/
转载文章受原作者版权保护。转载请注明原作者出处!