

本文为博主原创文章,未经博主允许不得转载。
本文为专栏《python三维点云从基础到深度学习》系列文章,地址为”https://blog.csdn.net/suiyingy/article/details/124017716″。
Second模型的基本介绍、稀疏卷积、mini kitti数据集等请参考本专栏的上一篇博文:【三维目标检测】Second 模型 (一)_Coding的叶子的博客-CSDN博客。本节将介绍模型的详细结构与推理过程。文中参考代码来源于mmdetection3d框架中的second模型。mmdetection3d安装和调试验证可参考本博客之前的专栏,里面有详细介绍。
1 second模型总体过程
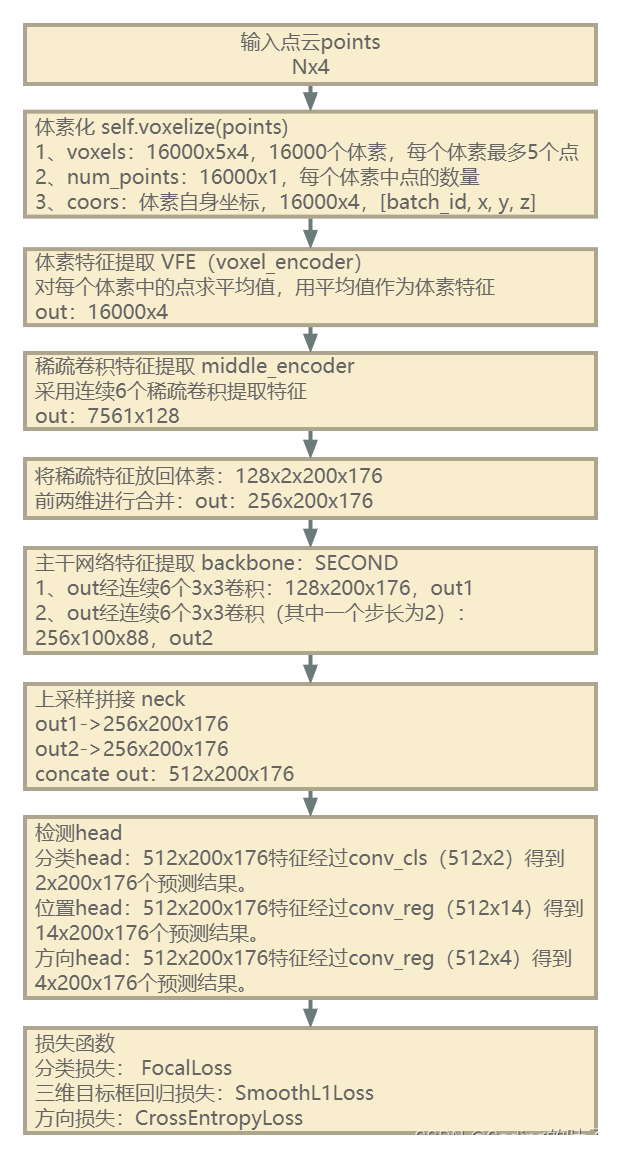

2 主要模块解析
2.1 体素化
函数:self.voxelize(points)
Voxelization(voxel_size=[0.05, 0.05, 0.1], point_cloud_range=[0, -40, -3, 70.4, 40, 1], max_num_points=5, max_voxels=(16000, 40000), deterministic=True)
输入:
<
Original: https://blog.csdn.net/suiyingy/article/details/125670763
Author: Coding的叶子
Title: 【三维目标检测】Second 模型 (二)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/629564/
转载文章受原作者版权保护。转载请注明原作者出处!