

KITTI数据集详解
数据采集车
以下图片来自KITTI官网:KITT官方link
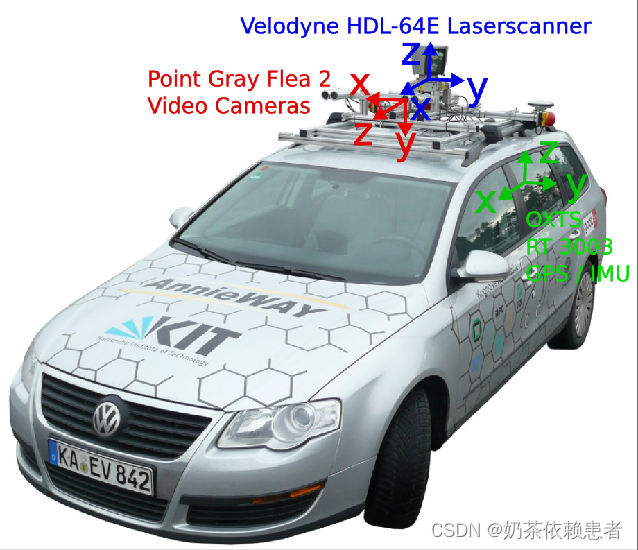

Kitti的数据采集车,顶上是一个 64线的velodyne激光雷达,前面有四个摄像头分别是cam0~3,其中0和1是灰度相机,2和3是rgb相机。 激光雷达的坐标系遵循右手定则,而相机坐标系遵循左手定则,如图所示。
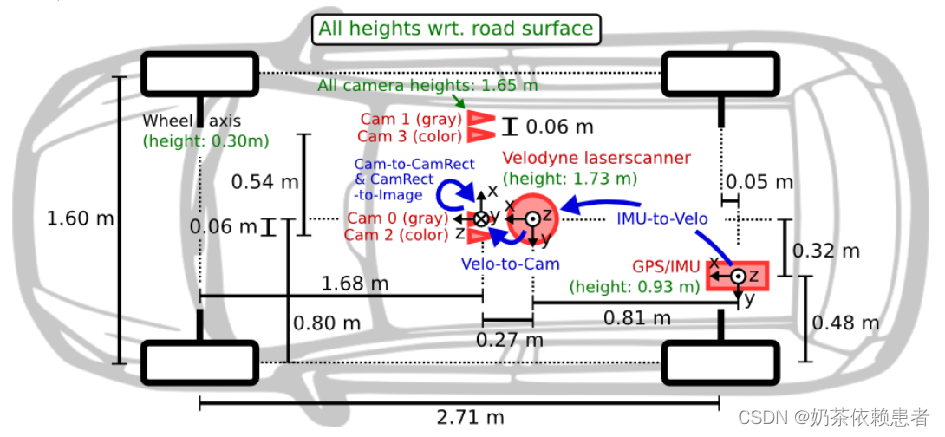
为了生成双目立体图像,相同类型的摄像头相距54cm安装。由于彩色摄像机的分辨率和对比度不够好,所以还使用了两个立体灰度摄像机,它和彩色摄像机相距6cm安装。
四个相机经过了严格的位置矫正,保证yz同值,x同轴,如果想进行lidar与camera的坐标系转换, 默认以cam0为基准,即如果是cam0转到velodyne,就直接转,如果是cam其他转velodyne,则先要转到cam0,再转到velodyne,相机和激光的坐标转换后续会详细说明。
; 目录结构
常见的目录结构如下(参照Det3d):
└── KITTI_DATASET_ROOT
├── training
Original: https://blog.csdn.net/weixin_43753850/article/details/125620900
Author: 奶茶依赖患者
Title: KITTI数据集详解
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/629118/
转载文章受原作者版权保护。转载请注明原作者出处!