

这是目录
实验原理
1.1 目标检测概念
在接收到回波信号后,我们需要对信号进行处理,以区分目标与噪声、杂波和干扰。
目标检测方法的核心是 阈值法。
如果雷达回波大于阈值,则显示检测到目标,否则视为噪声。

经典的检测问题可以建模为一个二元假设问题。
H 0 : z = n H_0:z=n H 0 :z =n H 1 : z = 1 + n H_1:z=1+n H 1 :z =1 +n
其中n n n是满足N ( 0 , 1 ) N(0,1)N (0 ,1 )的加性高斯白噪声。
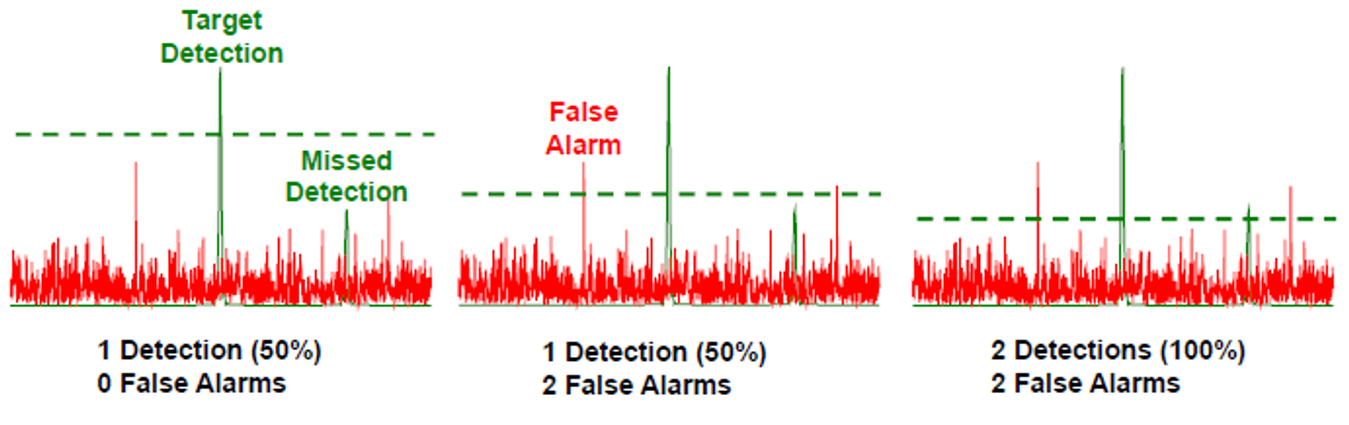
所以,每次进行实验时,可能会发生以下四种情况之一:

雷达回波总是含有噪声,噪声会引起错警和漏检,但同时降低虚警概率与提高检测概率之间存在矛盾,因此需要精心设计阈值。
; 1.2 恒定阈值
对于单个数据样本的最简单情况,虚警概率为P F A = e − T P_{FA}=e^{-T}P F A =e −T,其中T是检测阈值。So,固定虚警率,阈值为T = − l n P F A T=-lnP_{FA}T =−l n P F A 。

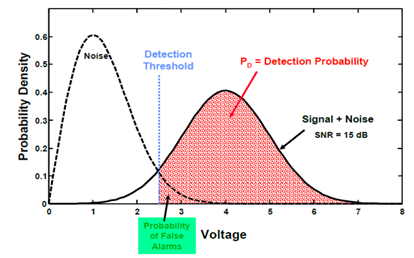
对于unnormalized data sample 和 绝对律检测器,阈值是T = − σ 2 l n P F A , T=\sqrt{-\sigma^2lnP_{FA}},T =−σ2 l n P F A ,其中,其中σ 2 σ^2 σ2是干扰的总噪声功率。虚警概率为P F A = e − T / σ 2 P_{FA}= e^{-T/σ^2}P F A =e −T /σ2。检测过程如下图所示。

请注意,阈值T与噪声功率成正比。当雷达接收机输出的干扰发生变化时,实际P F A P_{FA}P F A 将剧变。对于雷达系统来说,当干扰增加时,假警报的数量也会增加。因此,应调整固定阈值以保持所需的P F A P_{FA}P F A 。
1.3 恒虚警率(CFAR)检测
根据以上内容,我们知道应该调整阈值以保持所需的P F A P_{FA}P F A 。我们将在这里介绍基本的单元平均CFAR(CA CFAR)方案。
CA CAFR使用当前待检测数据周围一定范围的单元格的 平均值来确定被测单元格的阈值,如下图所示。

Window:做CA-CFAR的数据长度
使用平方律检测器时,估计的阈值为

其中x是平方律检测器的输出,α = N ( P F A − 1 / N − 1 ) , α=N(P_{FA}^{-1/N}-1),α=N (P F A −1 /N −1 ),N是相邻单元的数量,即蓝色单元,P F A P_{FA}P F A 是虚警概率。检测过程如下图所示。

; 实验内容
2.1 恒定阈值法
实验参数:
SNR:0-20dB
误警率:0.001
2.1.1 目标检测模拟
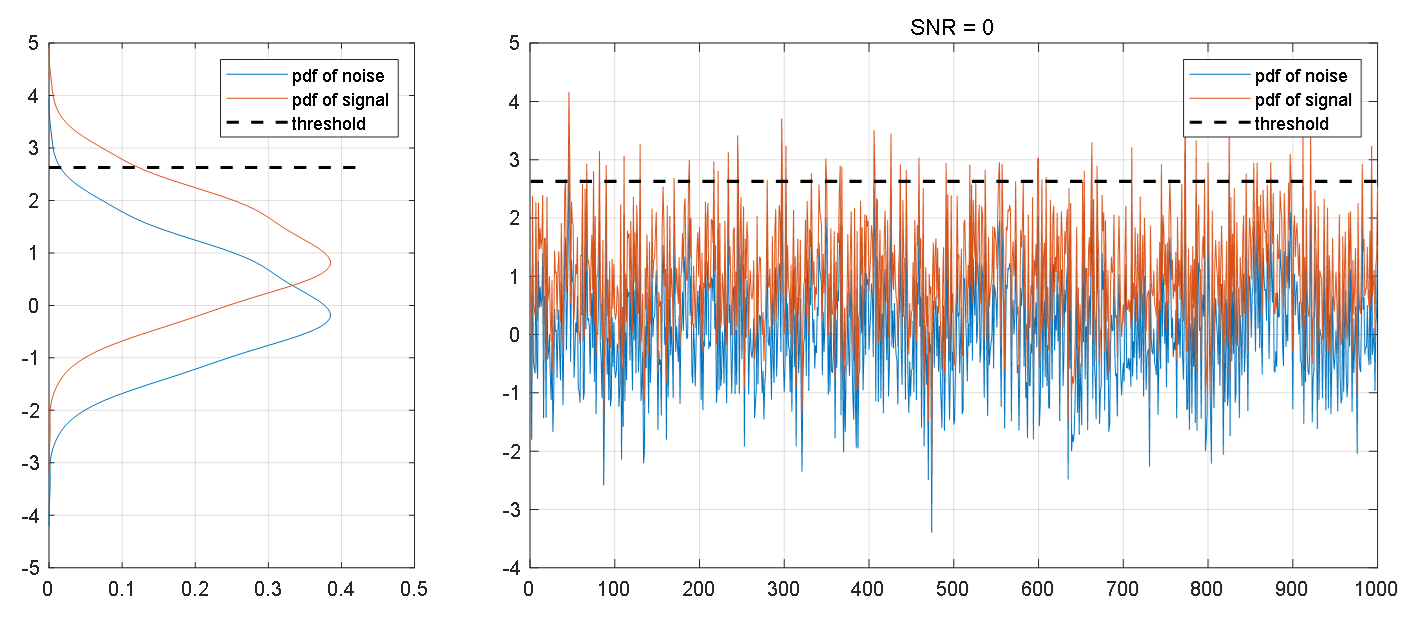
利用1.2所述公式T = − σ 2 l n P F A , T=\sqrt{-\sigma^2lnP_{FA}},T =−σ2 l n P F A ,算得阈值。
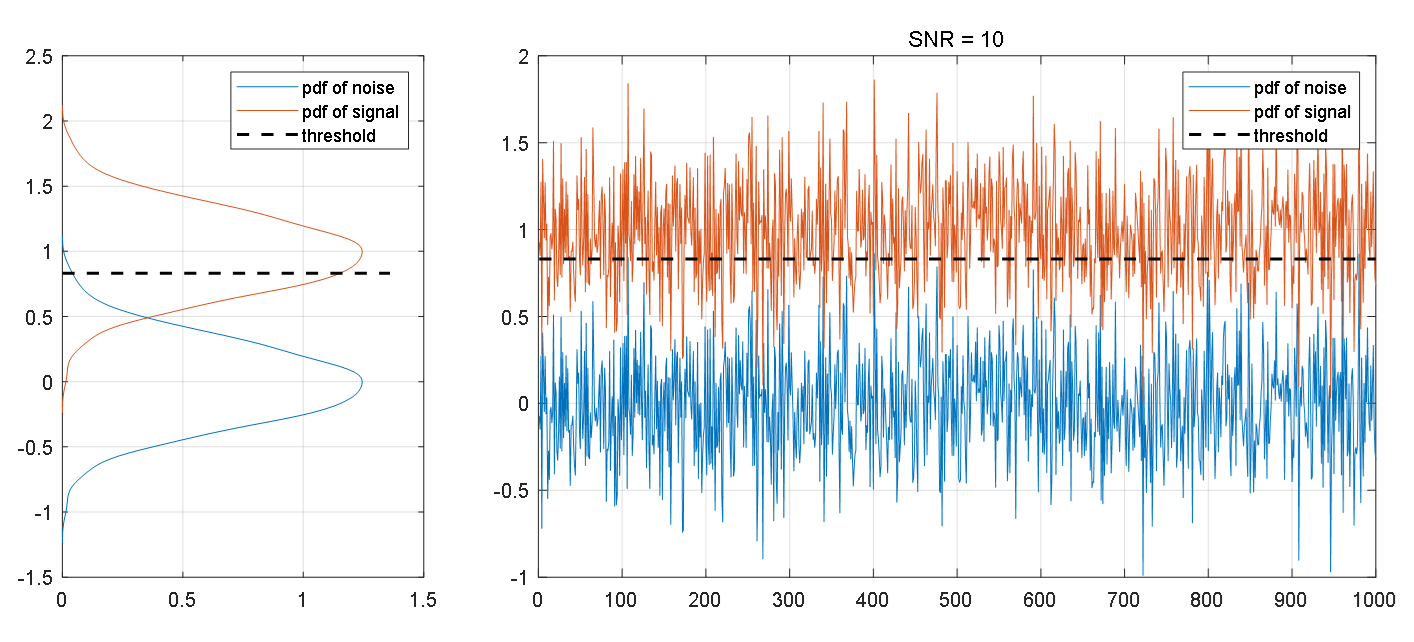
我们绘制了噪声、噪声+信号的pdf和时域波形,虚线为阈值。
1) SNR = 0dB 时:
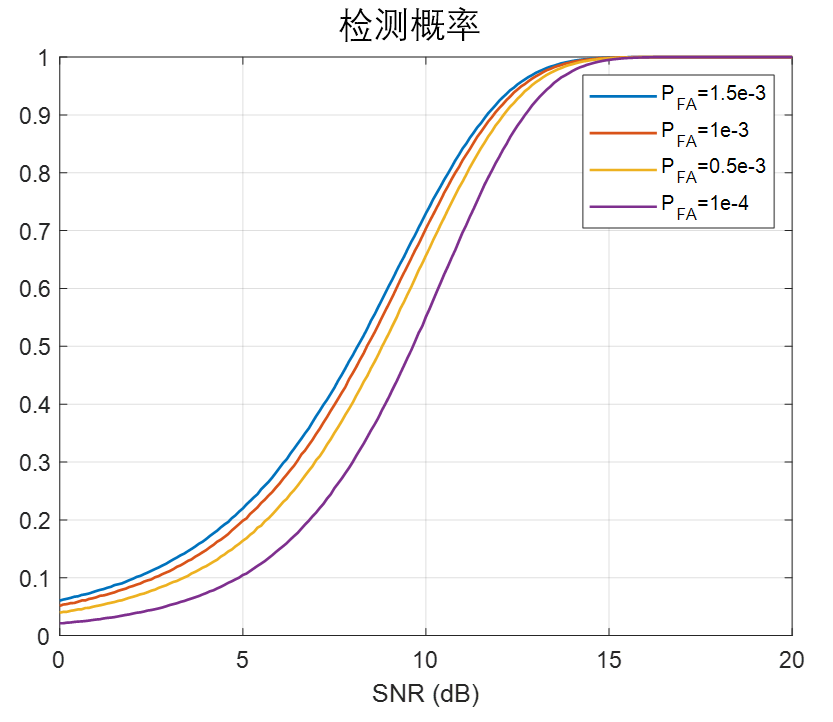
; 2.1.2 检测概率
重复实验次数:100
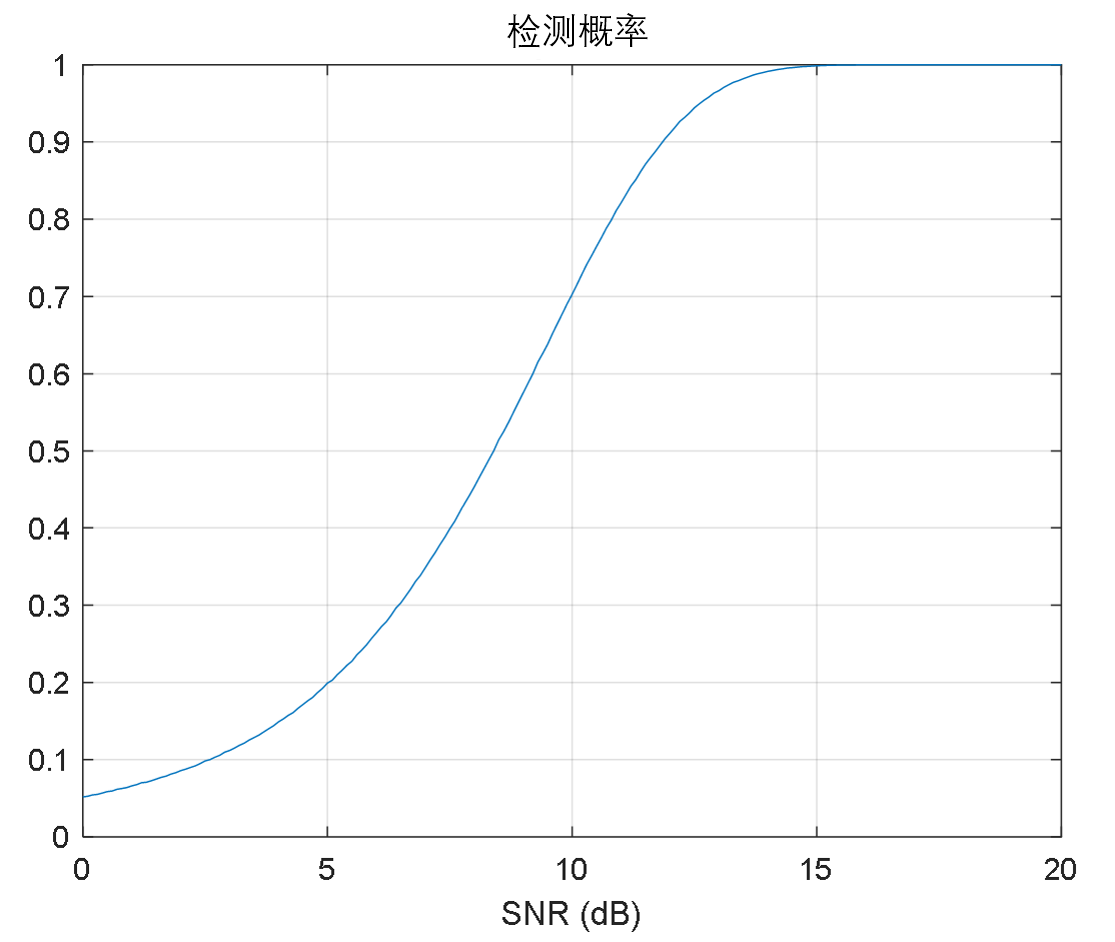
改变P F A P_{FA}P F A ,我们可以看到P D P_D P D 会随着P F A P_{FA}P F A 的减小而减小。
2.2 CA-CFAR恒虚警
参数设置:
窗长(单边):10
保护间隔:1
错警率:0.001
重复实验次数:1000
SNR:0-20dB
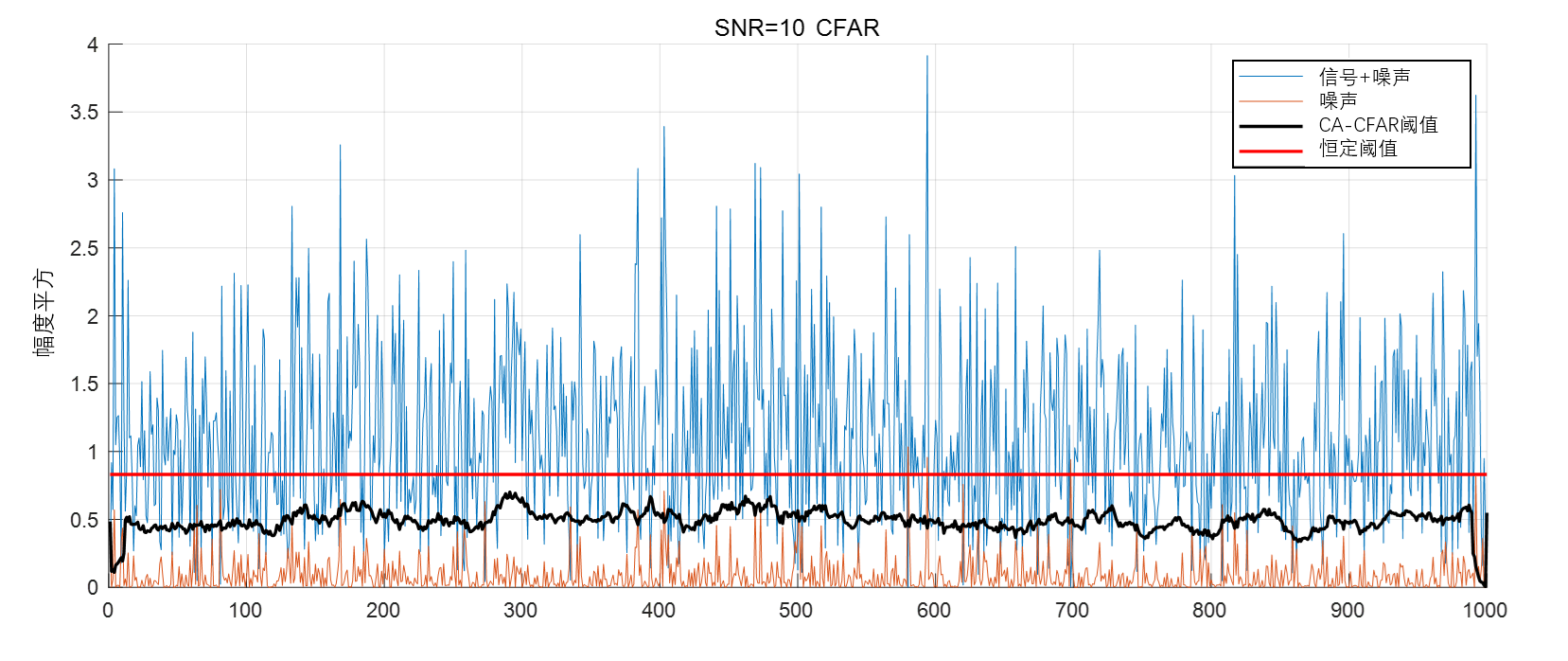
2.2.1 目标检测
我们演示了在SNR=10dB和SNR=15dB的情况下的检测过程。黑色实线表示恒虚警阈值,红色实线表示恒定阈值,橙色实线表示噪声,蓝色实线表示信号加噪声。
- SNR = 10dB
- SNR = 15dB
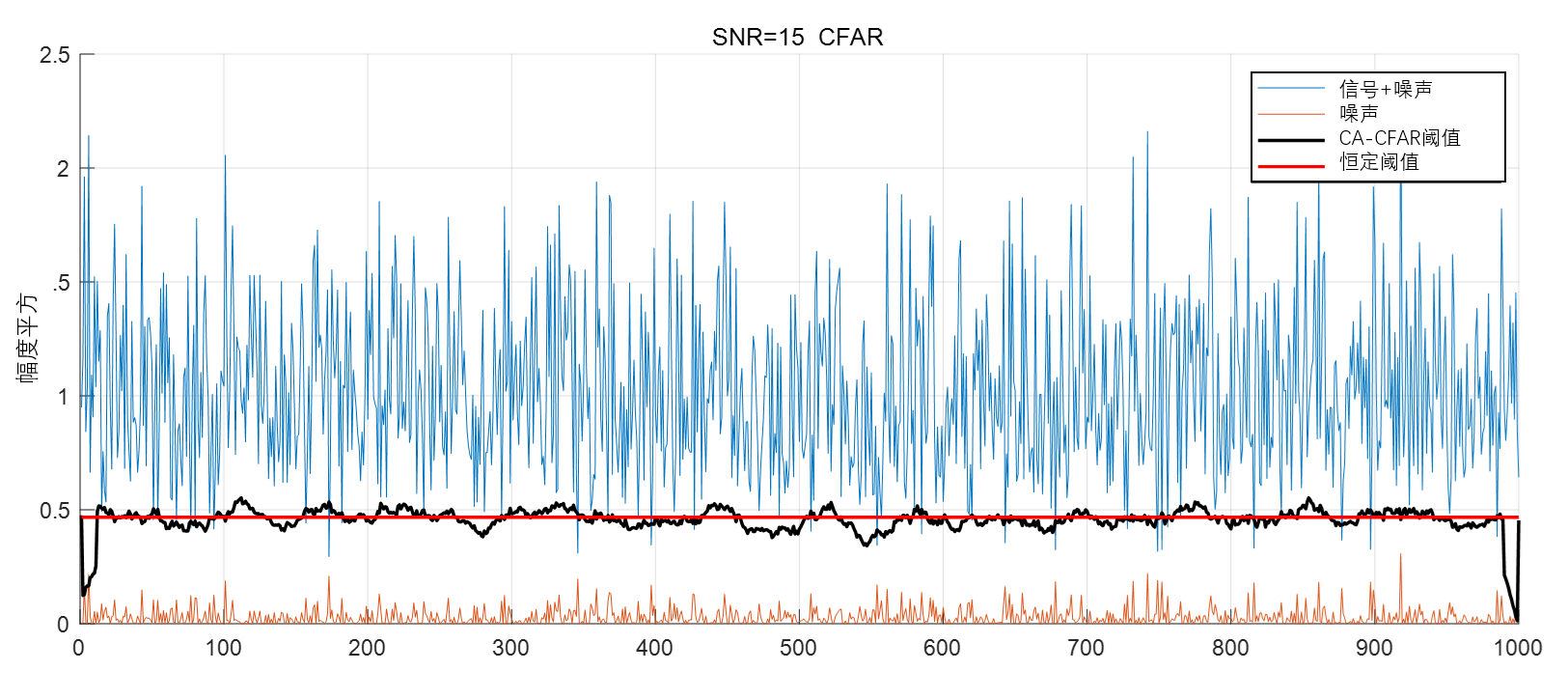
当信噪比相对较大时,即15dB,恒虚警阈值相当于恒定阈值,因此两种方案可能具有相同的检测率。
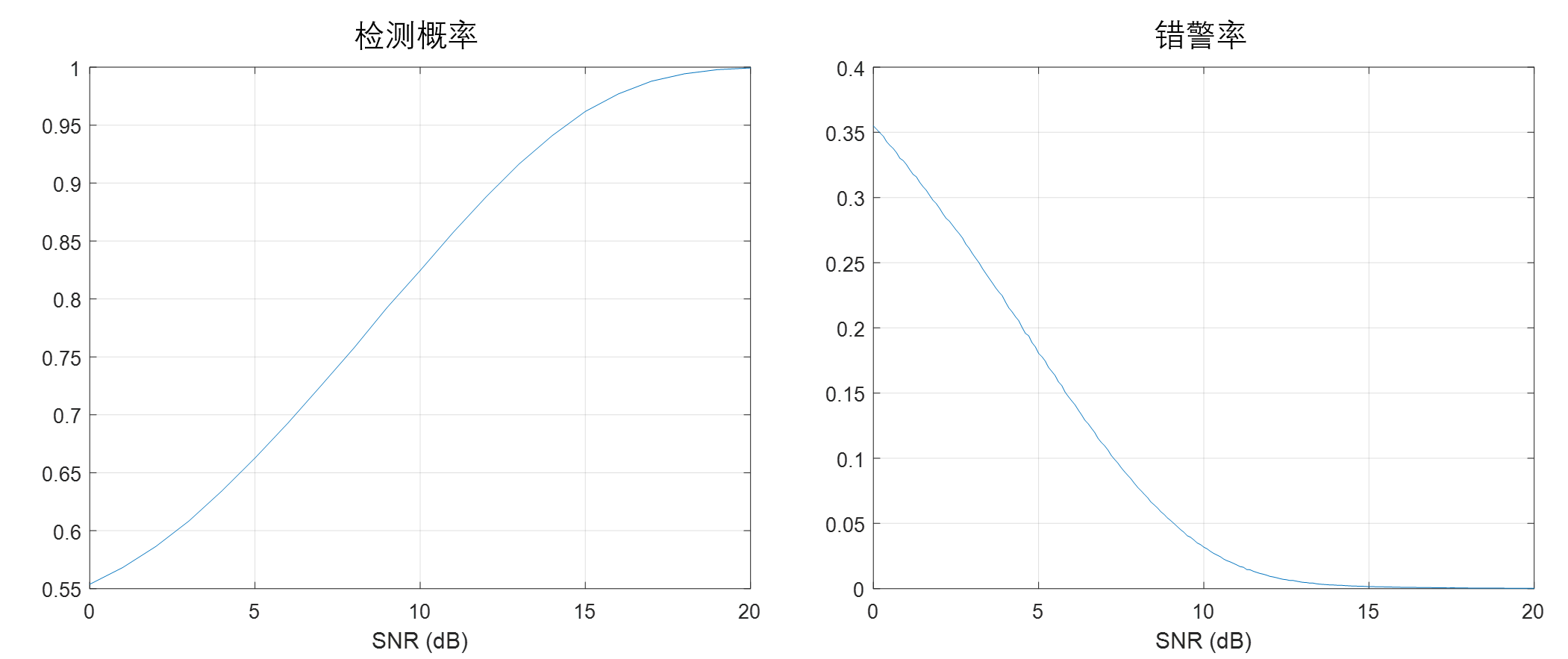
; 2.2.2 检测概率和错警率
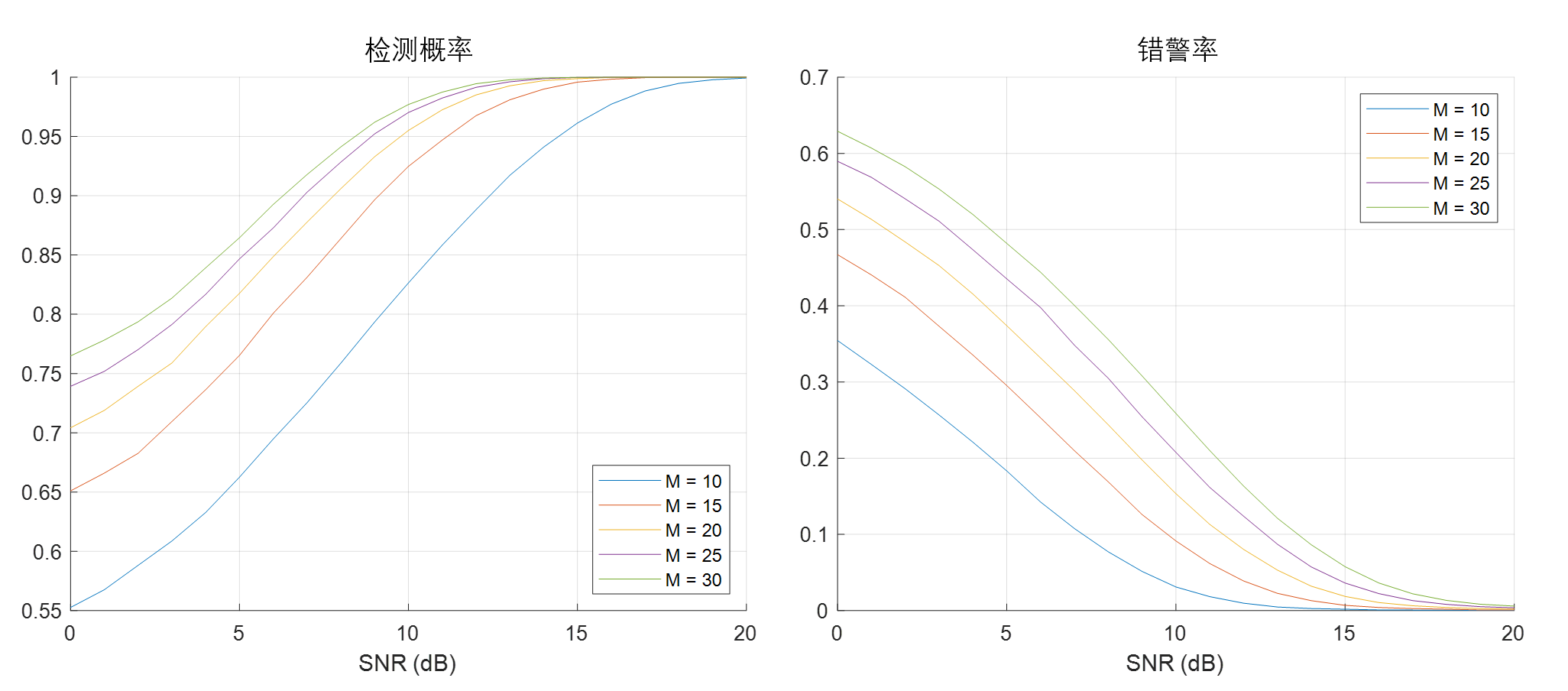
2.2.3 其他参数
窗口的长度会影响性能,我们对此进行了模拟。
M表示窗长。
; 2.2.4 CA-CFAR和恒定阈值比较
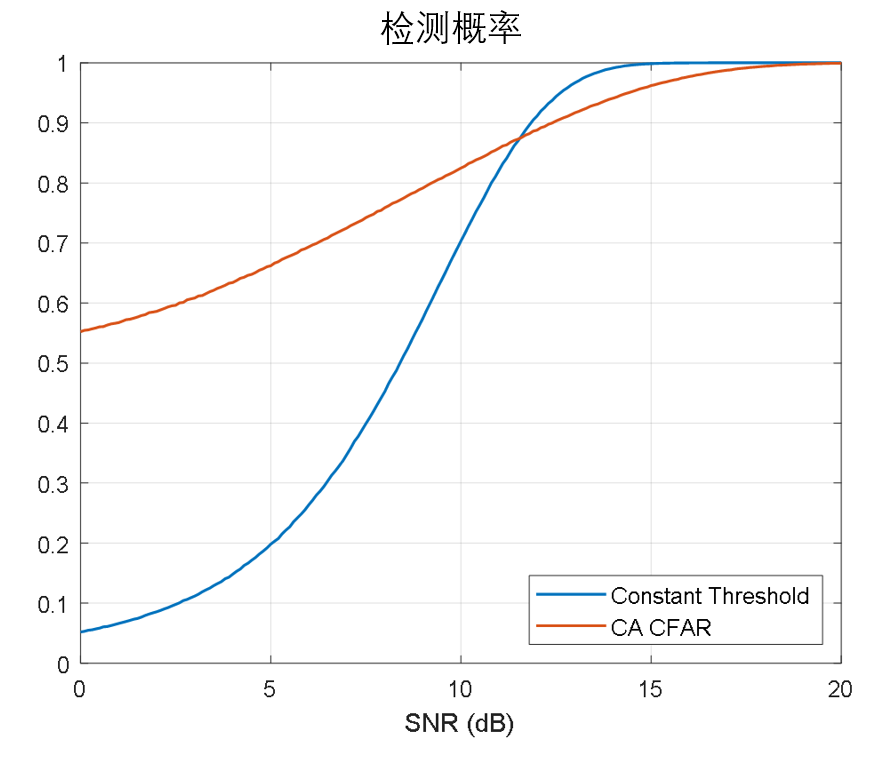
从图中可以看出,当信噪比相对较小时,CA-CFAR方法的$P D P_D P D 较高,而当信噪比相对较大时,恒定阈值方法较好。当信噪比大于18dB时,两种方法的检测概率都达到饱和。
例如,如果我们想要得到指定的P D P_D P D =0.8,我们需要要求恒定阈值的信噪比比比CA-CFAR方案高出约4.5dB。
正如我们在恒虚警检测的部分仿真中所述,当信噪比较小时,由于恒虚警方案可以充分利用干扰,因此我们可以获得更好的阈值。当信噪比较大时,这两种方案具有等效阈值,且信号和噪声具有很强的可分离性。
2.3 MATLAB实现
clc;clear;close all
% 参数
signal = 1;
SNR = 10:0.1:20;
Pfa = 1e-3;
N = 1000; % 信号长度
Q = 1000; % 重复实验次数
Pd = zeros(2,length(SNR)); % 检测概率
Pf = zeros(2,length(SNR)); % 错警率
T_a = zeros(2,length(SNR)); % 阈值
for r = 1:length(SNR)
snr = SNR(r);
for q = 1:Q
sigma2 = signal/(10^(snr/10)); % 噪声方差
x = ones(1,N)*sqrt(signal); % 信号
noise = sqrt(sigma2)*randn(1,N); % 噪声
x = x + noise; % 信号+噪声
% [fn,xn] = ksdensity(noise); % 噪声pdf
% [fs,xs] = ksdensity(x); % 噪声+信号的pdf
% ============== 恒定阈值 =================
T1 = sqrt(-1*sigma2*log2(Pfa)/log2(exp(1)));
T_a(1,r) = T_a(1,r)+T1;
t = 1:N;
Pd(1,r) = Pd(1,r) + sum(abs(x)>T1);
Pf(1,r) = Pf(1,r) + sum(abs(noise)>T1);
% =================== CA CFAR ===================
M = 10; % length of window (single side)
g = 1; % length of guard cells(single side)
% 平方律
y = abs(x).^2;
n = abs(noise).^2;
k = Pfa^(-1/2/M)-1;
T2 = zeros(1,N);
for i = 1:N
if i == 1
cell_right = 1/M*sum(y(i+g:i+g+2*M));
Z = cell_right/2;
end
if i>1 && i < M+g+1
cell_right = 1/2/M*sum(y(i+g:i+g+M-i-1));
cell_left = 1/M*sum(y(1:i-g));
Z = (cell_left+cell_right)/2;
end
if M+g+1i && i N-M-g
cell_left = 1/M*sum(y(i-g-M:i-g));
cell_right = 1/M*sum(y(i+g:i+g+M));
Z = (cell_left+cell_right)/2;
end
if i> N-M-g && i<N
cell_left = 1/M*sum(y(i-g-M+i+1:i-g));
cell_right = 1/M*sum(y(i+g:N));
Z = (cell_left+cell_right)/2;
end
if i == N
cell_left = 1/M*sum(y(i-g-M*2:i-g));
Z = cell_left/2;
end
T = k*Z;
T2(i) = T;
if y(i) >= T2(i)
Pd(2,r) = Pd(2,r)+1;
end
if n(i) >= T2(i)
Pf(2,r) = Pf(2,r)+1;
end
end
end
end
% 取平均
Pd(1,:) = Pd(1,:)/Q/N;
Pf(1,:) = Pf(1,:)/Q/N;
Pd(2,:) = Pd(2,:)/Q/N;
Pf(2,:) = Pf(2,:)/Q/N;
T_a = T_a/Q;
figure;
plot(SNR,Pd(1,:),'LineWidth',1.2);
title('Probability of Detection');
xlabel('SNR (dB)');
grid on
hold on
plot(SNR,Pd(2,:),'LineWidth',1.2);
legend('恒定阈值','CA CFAR');
参考文献
《雷达信号处理》
Original: https://blog.csdn.net/qq_43485394/article/details/123417527
Author: 邓哈哈哈哈
Title: 【雷达目标检测】恒定阈值法和恒虚警(CFAR)法及代码实现
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/629048/
转载文章受原作者版权保护。转载请注明原作者出处!