

请注意:成功是有条件的,也就是你的melodic安装已完毕,并且rosdep update成功,才能使用该教程,如果仅是rosdep update失败,可以尝试参考我的另一篇文章rosdep update更新超时问题解决
以下为上面连接的搬运和部分改动:
一、为cartographer安装依赖
sudo apt-get update
sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-melodic-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev
sudo apt-get install -y python-wstool python-rosdep ninja-build stow
二、安装cartographer、cartographer_ros和ceres-solver
1.初始化工作空间(工作空间名称注意不要重复)
mkdir catkin_google_ws
cd catkin_google_ws
wstool init src
2.从原作者的gitee上下载安装cartographer和cartographer_ros
cd src
git clone https://gitee.com/liu_xiao_eu/cartographer.git
git clone https://gitee.com/liu_xiao_eu/cartographer_ros.git
3.在上述建好的src文件夹下,获取ceres-solver源码
版本为ceres-solver-1.13.0,其他的没试过,其他的有可能会出现版本匹配不对的问题
wget ceres-solver.org/ceres-solver-1.13.0.tar.gz
4.解压
tar xvf ceres-solver-1.13.0.tar.gz
5.编译
cd ceres-solver-1.13.0
mkdir build
cd build
cmake ..
make
6.测试并安装依赖
make test
sudo make install
三、安装 cartographer_ros 的依赖
(注意:这里与原文有区别,原文用的是rosdepc,因为我只有rosdep所以改成了rosdep,具体安装方式请自行解决)
返回到工作空间的目录下,并在工作空间的目录下进行后面操作(逐行输入):
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
四、 安装库并编译
Cartographer 需要 abseil-cpp library,方式如下:
src/cartographer/scripts/install_abseil.sh
catkin_make_isolated --install --use-ninja
五、 下载测试包测试建图
1.下载官网提供2D数据包测试:
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
2.此时的应在工作空间的目录下,执行测试:
source install_isolated/setup.bash
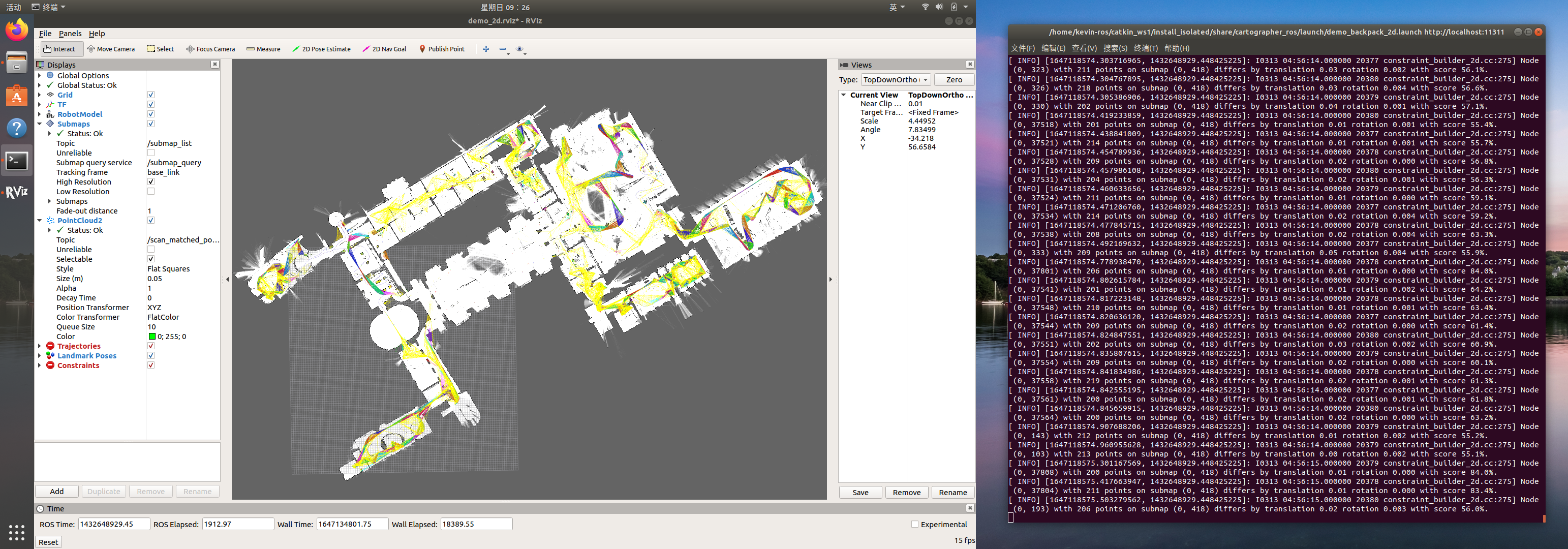
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
最后配一张我跑了差不多的图:

官方同时提供了3D数据包,感兴趣的可以下载跑跑看,步骤同上
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/with_intensities/b3-2016-04-05-14-14-00.bag
在工作空间的目录下,执行测试:
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/b3-2016-04-05-14-14-00.bag
Original: https://blog.csdn.net/qq_46387453/article/details/123455219
Author: KevinXT
Title: 【Ubuntu18.04+melodic+cartographer安装并跑通官方测试例程】(2022.3.13跑通)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/598212/
转载文章受原作者版权保护。转载请注明原作者出处!