

文章目录
本文仅记录仿真指令,搭建安装不在此…
一. PX4
首先给飞控源码和子目录权限
chmod -R 777 PX4-Autopilot
1. gazebo 仿真
PX4 中 使用 gazebo 仿真,一般对应机型的指令如下:
Quadrotor make px4_sitl gazebo
Quadrotor with Optical Flow make px4_sitl gazebo_iris_opt_flow
3DR Solo (Quadrotor) make px4_sitl gazebo_solo
Typhoon H480 (Hexrotor) (supports video streaming) make px4_sitl gazebo_typhoon_h480
Standard Plane make px4_sitl gazebo_plane
Standard Plane (with catapult launch) make px4_sitl gazebo_plane_catapult
Standard VTOL make px4_sitl gazebo_standard_vtol
Tailsitter VTOL make px4_sitl gazebo_tailsitter
Ackerman vehicle (UGV/Rover) make px4_sitl gazebo_rover
HippoCampus TUHH (UUV: Unmanned Underwater Vehicle) make px4_sitl gazebo_uuv_hippocampus
Boat (USV: Unmanned Surface Vehicle) make px4_sitl gazebo_boat
Cloudship (Airship) make px4_sitl gazebo_cloudship
1)旋翼测试:
make px4_sitl gazebo
执行后,将会直接弹出如下:
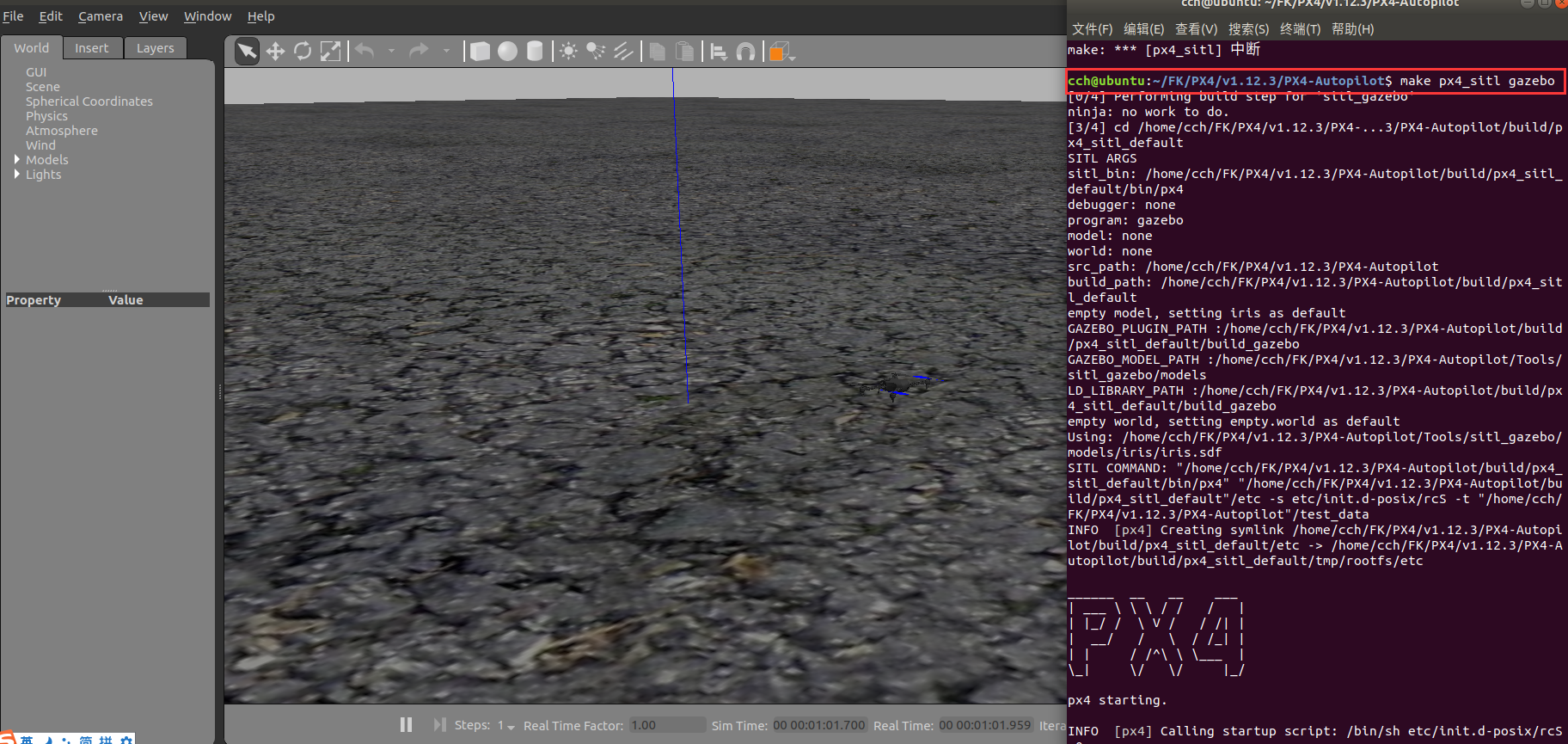

第一次可能会卡主,不行的话,重新执行一遍就好
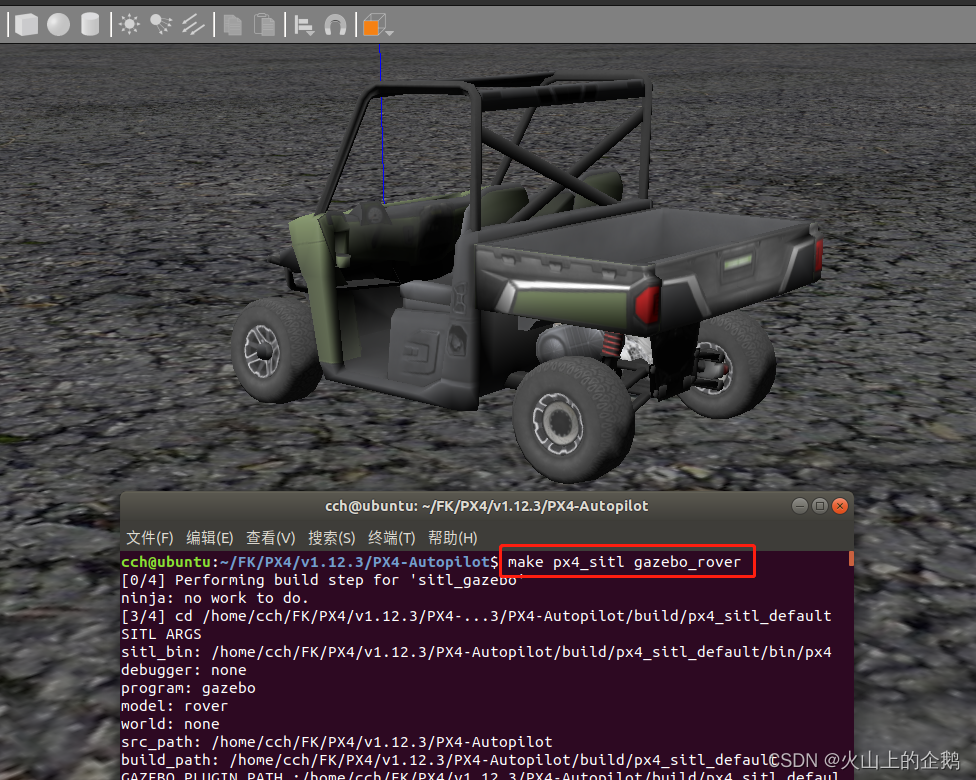
2)小车测试:
make px4_sitl gazebo_rover
执行后,将会直接弹出如下:
2. 连接地面站
与APM连接相似,命令略有不同
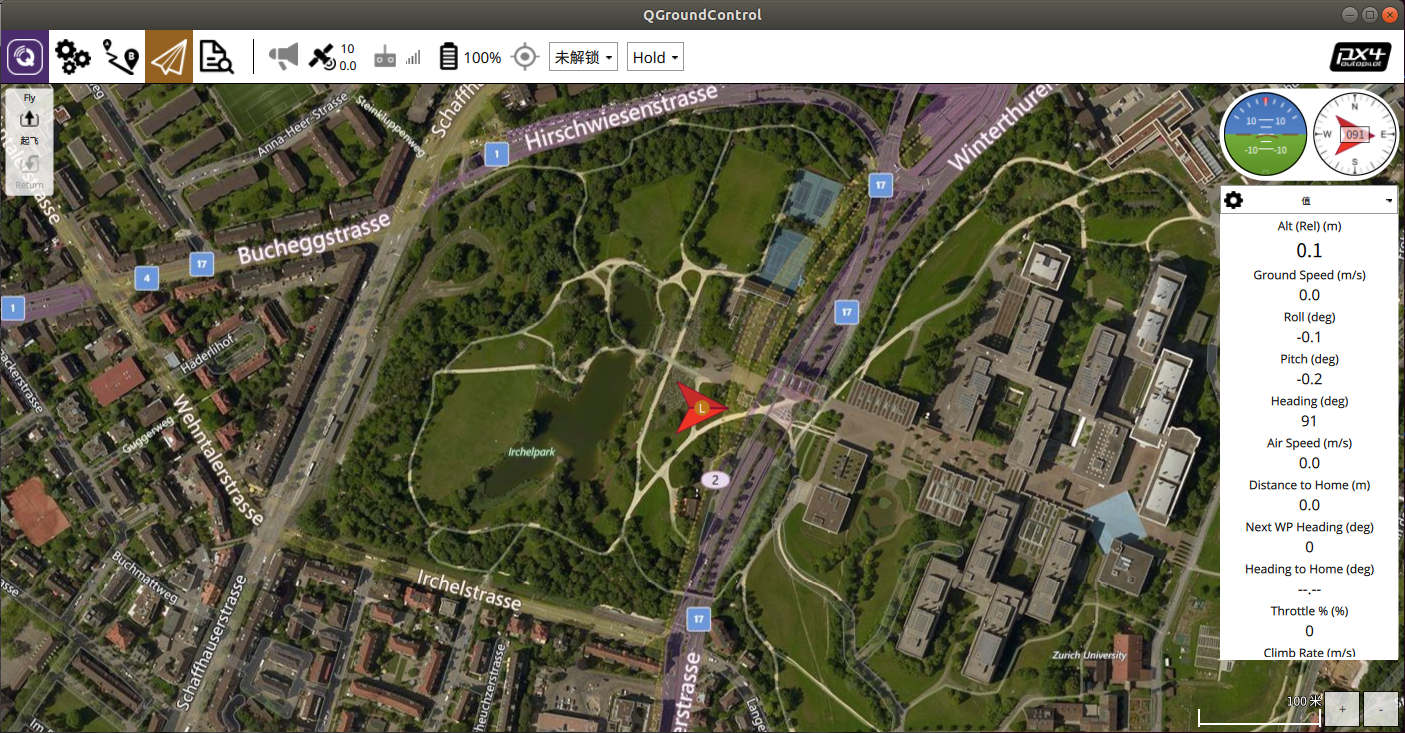
① Ubuntu 平台
ubuntu 中运行QGC地面站软件,勾选了udp会自动连接的:

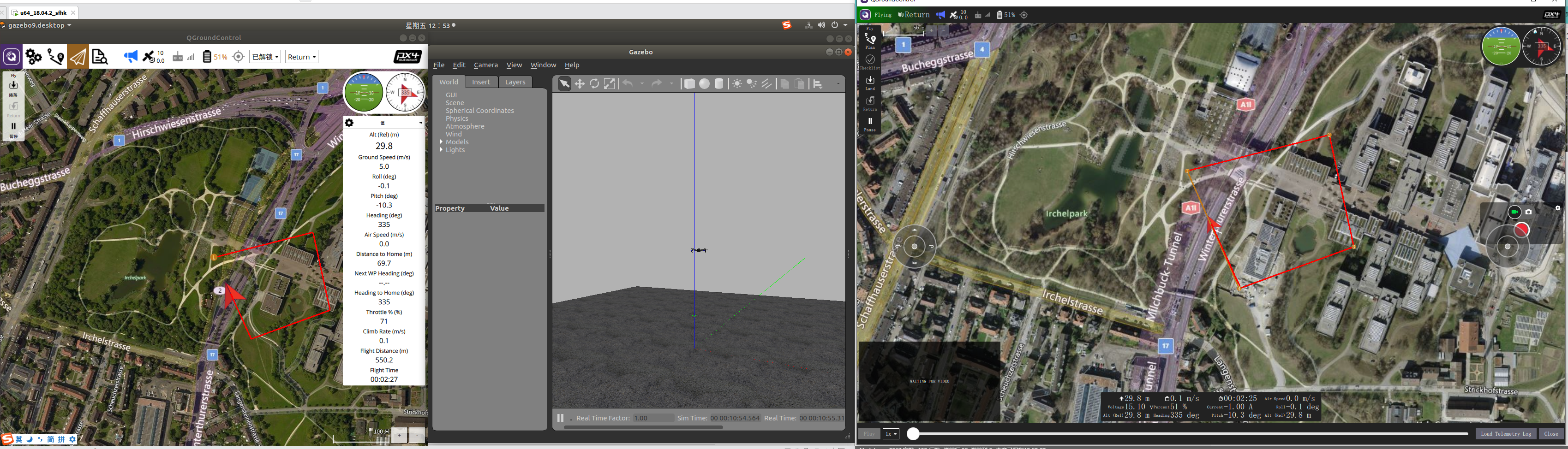
② Windows、Android 手机等平台(暂时没测试过不在同一网段的设备)
首先地面站也需要勾选udp的自动连接
然后创建Windows的 UDP 连接:(也可Android 手机等)
mavlink start -t 192.168.85.248 -u 14444
192.168.85.248 为Windows IP , 14444 为端口号,记得不能14550,因为会重复

QGC 连接后如下,截个双屏的:
3. 更改 Home点
此处定位到长沙的经纬度:
export PX4_HOME_LAT=28.197539
export PX4_HOME_LON=112.903970
export PX4_HOME_ALT=0
make px4_sitl gazebo //执行仿真
其它命令如更改飞行速度、风速参考官方:
官方参考的 http://docs.px4.io/master/zh/simulation/gazebo.html
二、APM 仿真
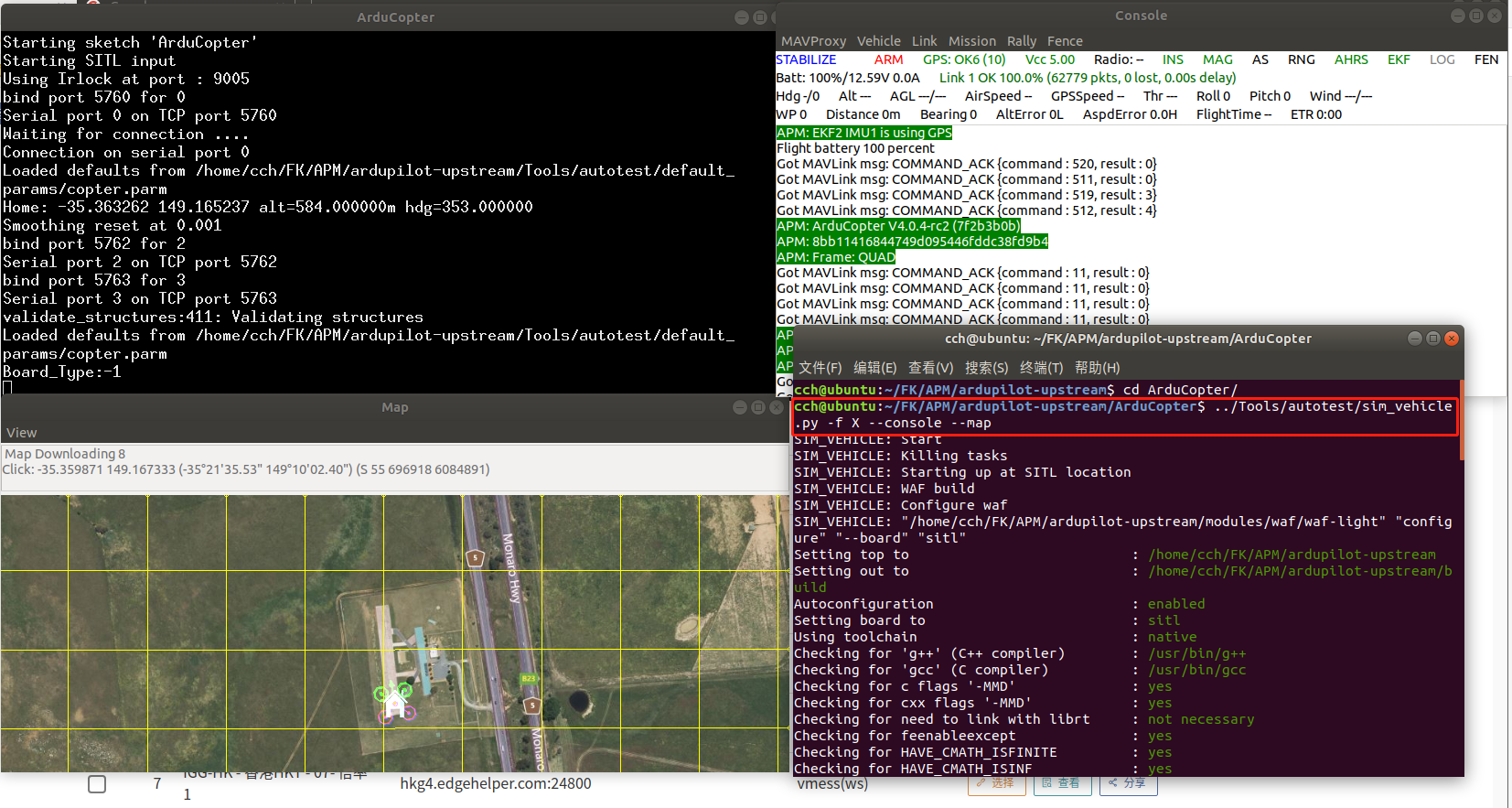
1. 执行仿真指令
在APM源码,ArduCopter 下:
../Tools/autotest/sim_vehicle.py -f X --console --map
执行后:
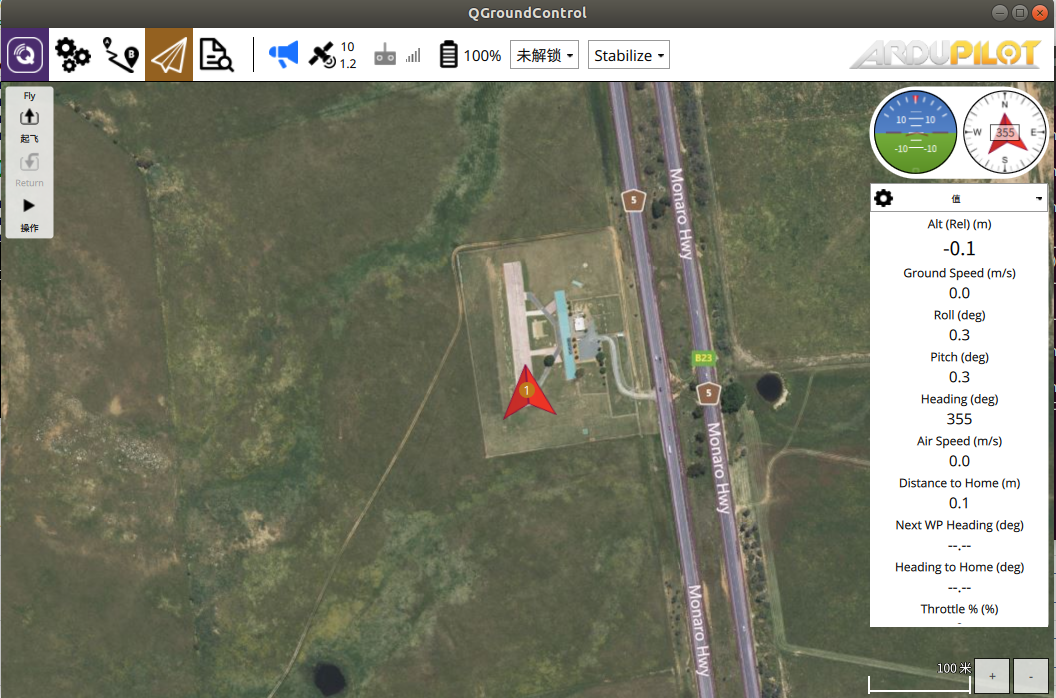
2. 连接地面站
① Ubuntu 平台
ubuntu 中运行QGC地面站软件,勾选了udp会自动连接的:
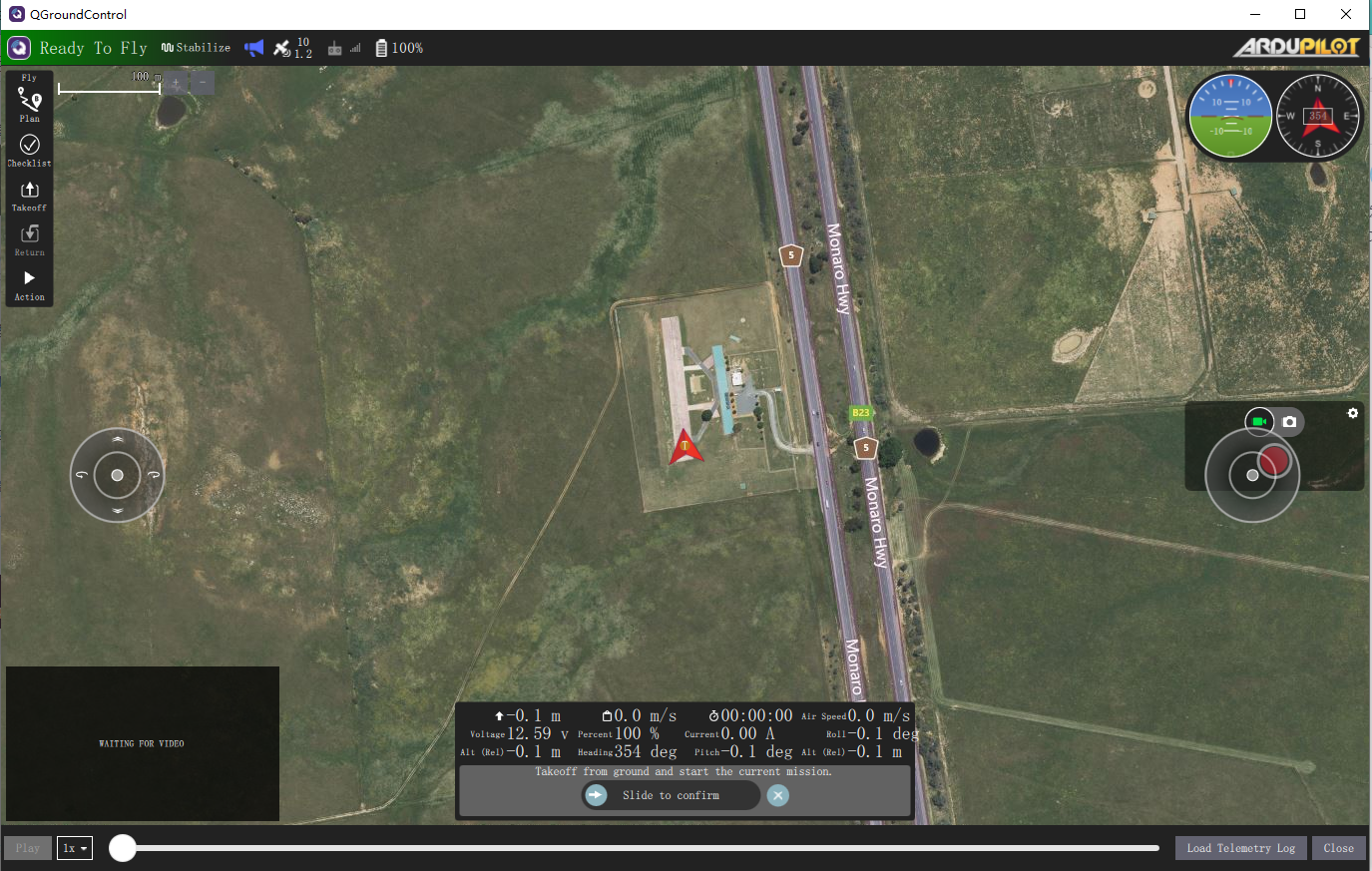
② Windows、Android 手机等平台(暂时没测试过不在同一网段的设备)
首先地面站也需要勾选udp的自动连接
然后创建 UDP 连接:(IP 为Windows、手机下的 IP 地址,端口号默认14550)
output add 192.168.85.148:14550

Windows下自动连接:
可以添加多个udp,同时连接多个地面站。
● 连接gazebo
记得都安装好后,
① 在APM源码中执行:
../Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map
../Tools/autotest/sim_vehicle.py -f gazebo-iris --console --map -L Changsha
② 另开终端启动 gazebo:
gazebo --verbose worlds/iris_arducopter_runway.world
之后,QGC 会自动连接…
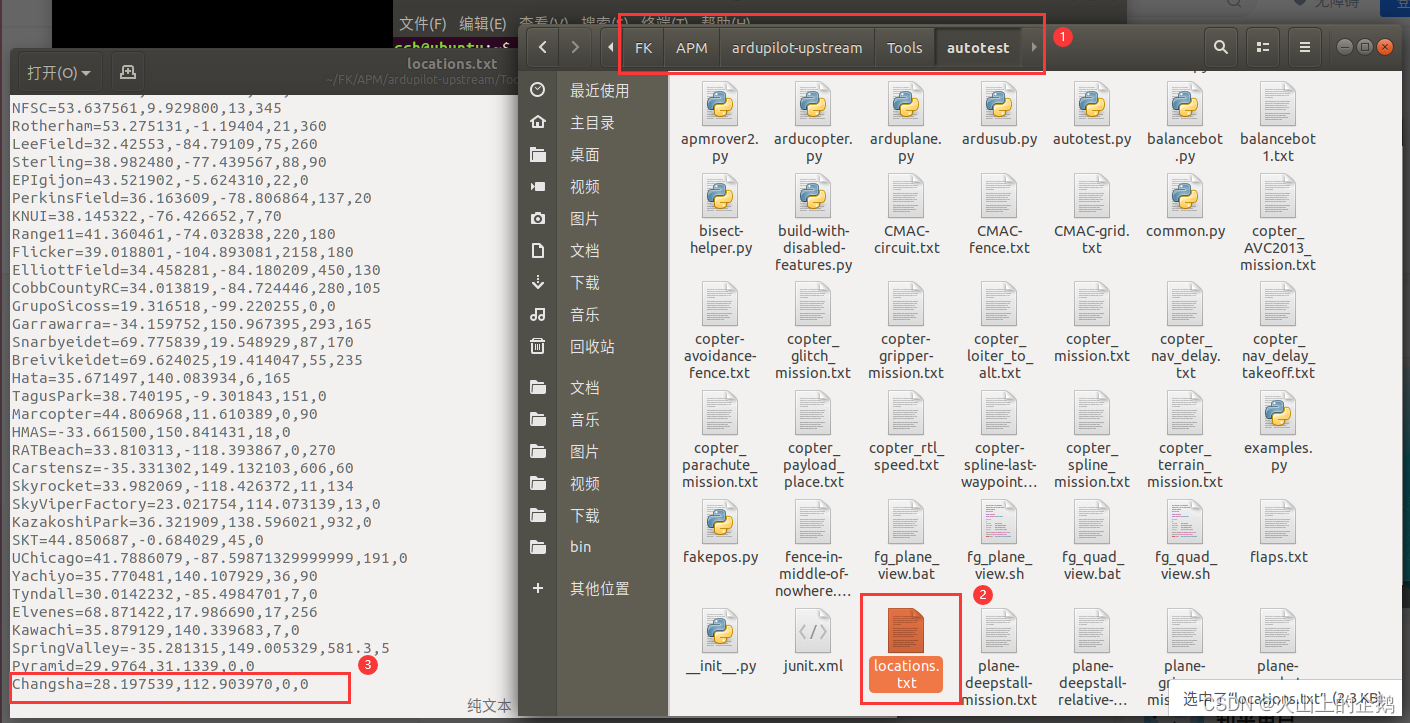
3. 更改 Home 点
如图所示 在 locations.txt 中添加新的定位点:
Changsha=28.197539,112.903970,0,0
执行命令:
../Tools/autotest/sim_vehicle.py -L Changsha -f x --console --map
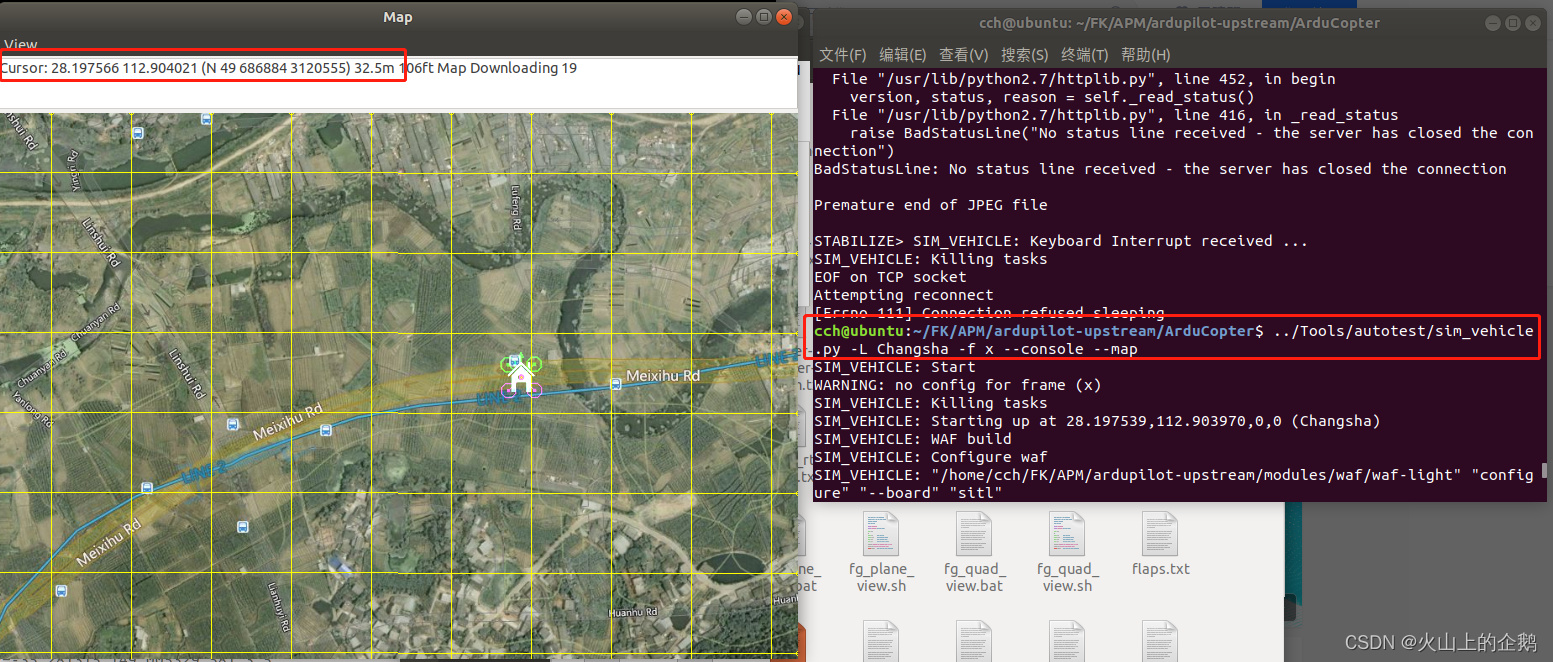
已经修改完定位点了,连接QGC即可!
可以参考这个:
ArduPilot+mavros+gazebo+QGC 联合仿真初体验
Original: https://blog.csdn.net/qq_16504163/article/details/121377348
Author: 火山上的企鹅
Title: PX4、APM无人机仿真连接QGC地面站记录(udp连接、更改home点等)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/597876/
转载文章受原作者版权保护。转载请注明原作者出处!