

最近在看关于惯性导航技术方法的综述,在此整理下。惯性导航技术涉及惯性传感器、算法、控制系统方面的知识,与材料、机电、控制理论等学科息息相关。
一、惯性传感器
惯性传感器是惯性导航系统的骨架,分为陀螺仪和加速度计,其中陀螺仪开发难度高,是惯性传感器的核心。
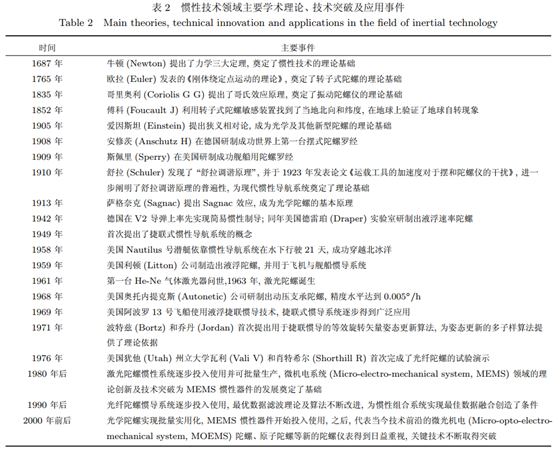
牛顿定律是惯性传感器的原理核心。其中,早期转子陀螺就是利用了转轴的定轴特性的工作原理。著名的傅科摆试验利用了这一原理证明了地球自转方向与角速度大小,其设计的仪表装置也就是陀螺仪的雏形。而德国的安修茨于1908年设计的陀螺罗经则开创了陀螺仪在航海史上应用的新纪元。同时期的舒勒调谐周期的提出,为实现高精度、实用性的惯性导航系统提供了充分的理论依据。
第二代惯性技术开始于上世纪40年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。首先是冯.布劳恩将惯导技术成功应用于德国V2火箭上。到50年代中后期, 0.5n mile/h的单自由度液浮陀螺平台惯导系统研制并应用成功。 1968年,漂移约为0.005º/h的G6B4型动压陀螺研制成功。这一时期,还出现了另一种惯性传感器-加速度计(对,加速度计出现时间比陀螺仪晚,但发展速度却大大超过陀螺仪)。 在技术理论研究方面,为减少陀螺仪表支承的摩擦与干扰,挠性、液浮、气浮、磁悬浮和静电等支承悬浮技术被逐步采用; 1960年激光技术的出现为今后激光陀螺(RLG)的发展提供了理论支持;捷联惯性导航(SINS)理论也正是在激光陀螺上被首先应用和发展。
第三代惯性技术的研究目标是进一步提高INS(Inertial Navigation Systerm)的精度。这一时期,各式的陀螺频出,摆脱了传统的利用转子定轴性原理的束缚,出现了静电陀螺(ESG)、动力调谐陀螺(DTG)、环形激光陀螺(RLG)、干涉式光纤陀螺IFOG等多个种类,根据工作原理大致可分为传统的转子式陀螺、光学陀螺、振动陀螺。80年代,伴随着半导体工艺的成熟和完善,采用微机械结构和控制电路工艺制造的微机电系统(MEMS)开始出现。
当前,惯性技术正处于第四代发展阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。著名的研究机构或公司如:Draper实验室、 perry、原Litton、 Delco、 Honeywell、 Kearfott、 Rockwell、 GE。而当前热门的MEMS陀螺,主要研制机构有:美国Sperry 、Draper 实验室、通用电器和Watson,包括韩国的三星公司和日本的一些研究机构在微机械陀螺的研究方面也取得了一定的成果。而更为前沿的原子陀螺尚处于样机研制或实验室探索阶段。


二、MEMS-INS研究内容
MEMS具有体积小、寿命长、抗干扰能力强等优势,但精度尚有待提高,当前主要应用于民用领域。纯惯性导航算法基于积分的方法进行状态更新,具有误差不收敛的缺陷。惯导系统的误差来源于传感器误差、算法误差、初始误差、数学模型误差等方面,因此,为解决这些方面问题,MEMS-INS当前的研究重点主要集中在MEMS 惯性器件的配置、测试标定、误差补偿以及组合算法与系统应用。
组合算法涉及到滤波技术的发展和应用。卫星导航的更新频率低、误差不累积、信号易受干扰的特点,而惯导自主性强、更新频率高、误差累积,二者之间可以优势互补,被认为是目前最理想的组合方式,但是目前关于紧耦合的组合方式的研究尚有待完善。除此以外,惯性/地形、惯性/星光、惯性/地磁、惯性/视觉等组合方式也都各具特点。
新型的滤波技术:自适应滤波、 联邦滤波、 _H 1_滤波、 小波滤波、 模糊逻辑、神经网络等滤波技术的发展,也将推导组合算法的进一步加强。
三、未来展望
① 单独MEMS 惯性传感器向高性能发展。
②MEMS 传感器的模块集成,即研制芯片级的MEMS IMU 将会是新的研究方向,实现微小惯性测量单元与微处理器的集成设计。
③系统算法方面,组合导航仍是研究方向,高性能的组合算法和组合方式将是研究热点。随着北斗三号的正式投入使用,北斗将会是比较适合与惯性导航系统进行组合的卫星导航系统。
④在应用领域,超小型的芯片级惯性、组合导航系统将主要应用于微型飞行器、微型机器人等对导航系统体积有特殊要求的微小型系统,并将用于民用领域和军用领域的战术级导航。
参考文献:
[1]基于MEMS技术的微型惯性导航系统的发展现状;
[2]惯性导航技术的新进展及发展趋势;
[3]惯性技术研究现状及发展现状;
[4]基于MEMS 的微型惯性导航技术综述
Original: https://blog.csdn.net/qq_44903985/article/details/124362452
Author: 空白不对照
Title: 惯性导航技术发展
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/597858/
转载文章受原作者版权保护。转载请注明原作者出处!