

UR10驱动包安装过程:
workspace
mkdir -p ur_ws/src && cd ur_ws
package https://github.com/UniversalRobots/Universal_Robots_ROS_Driver
https://github.com/fmauch/universal_robot
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
git clone -b calibration_devel https://github.com/fmauch/universal_robot.git src/fmauch_universal_robot
sudo apt update -qq
rosdep update
rosdep install --from-paths src --ignore-src -y
catkin_make
source devel/setup.bash
sudo apt install ros-kinetic-industrial-robot-status-interface
sudo apt
解决con find ur_msgs问题,在工作区ur_ws下执行
git clone https://github.com/ros-industrial/ur_msgs.git src/ur_msgs
https://github.com/UniversalRobots/Universal_Robots_ROS_controllers_cartesian
https://github.com/UniversalRobots/Universal_Robots_ROS_cartesian_control_msgs
https://github.com/UniversalRobots/Universal_Robots_ROS_passthrough_controllers
sudo apt install ros-noetic-ur-client-library
#
#
参考:
(76条消息) UR驱动包安装过程及遇到问题的解决方案_走过路过不要错过-CSDN博客
UR机械臂学习(5-3):驱动ur机械臂实物——问题及解决 (icode9.com)
上述步骤完成后,开始RVIZ,moveit,Gazebo联合仿真
- Gazebo加载模型
加载机械臂模型
roslaunch ur_gazebo ur10_bringup.launch
- 启动moveit
roslaunch ur10_moveit_config ur10_moveit_planning_execution.launch sim:=true
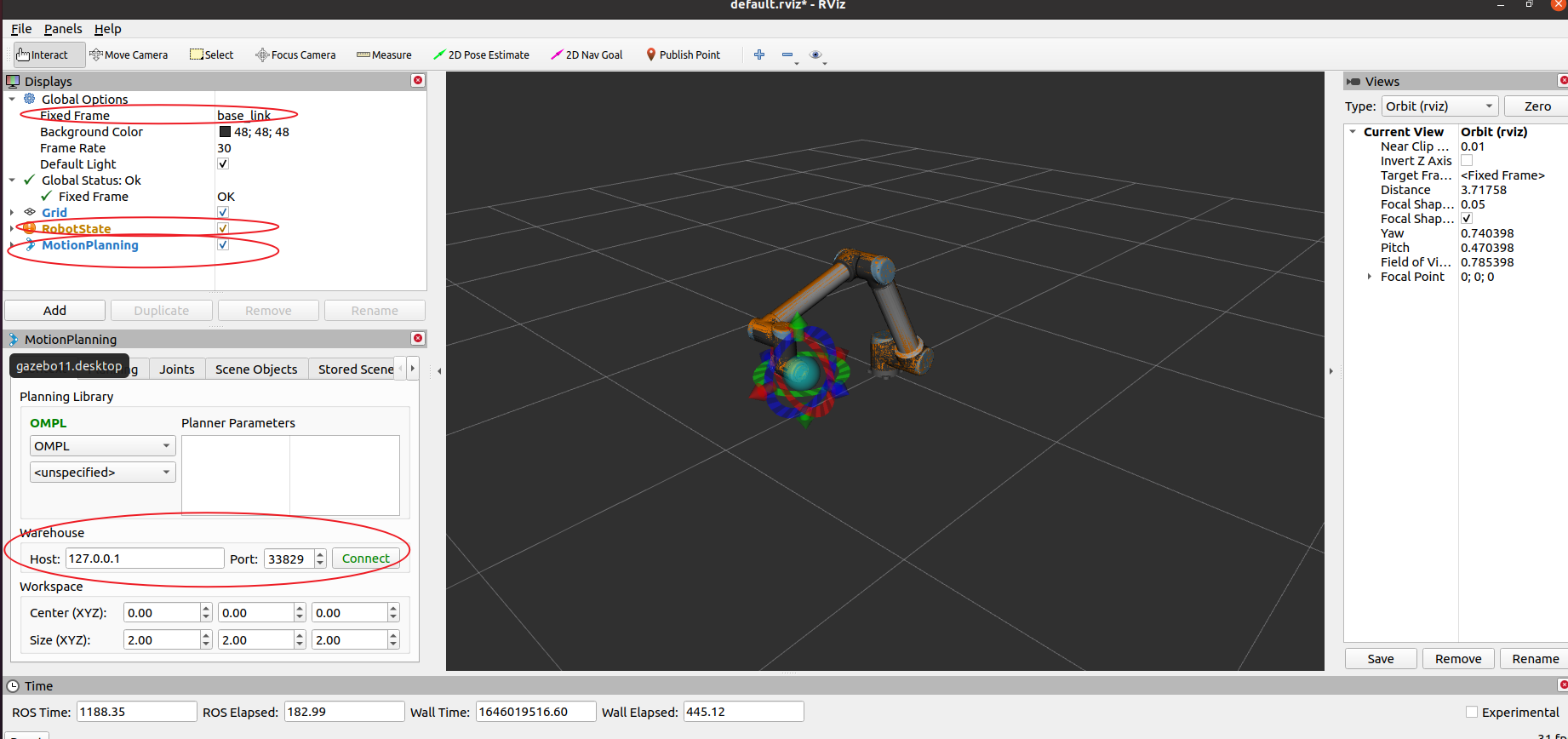
- 启动RVIZ
roslaunch ur10_moveit_config moveit_rviz.launch config:=true
修改RVIZ配置后,在rviz中规划后,点击Execute后,Gazebo中模型也会一起运动


配置UR示教器
将 Universal_Robots_ROS_Driver/ur_robot_driver/resources路径下的 externalcontrol.urcap文件拷贝到U盘安装到示教器上。

配置VM网络:

- 配置Ubuntu网络


配置主机网络


主机、VM虚拟机、UR控制柜,要处于统一同一网段;(将笔记本的WIFI关闭,避免不必要的麻烦)
#先启动Ubuntu中的节点ur_robot_driver,再在示教器上运行UR External Control
roslaunch ur_robot_driver ur10_bringup.launch limited:=true robot_ip:=192.168.1.102
#新终端
roslaunch ur10_moveit_config ur10_moveit_planning_execution.launch limited:=true
#新终端
roslaunch ur10_moveit_config moveit_rviz.launch config:=true
若报关于控制器的错误,可以在工作空间中下载这个包,编译,若编译遇到问题,可以把不用的包删除,再编译即可;
ros-controls/ros_controllers: Generic robotic controllers to accompany ros_control (github.com)
Original: https://blog.csdn.net/m0_48432283/article/details/123175514
Author: 小辉U
Title: UR10 ROS(noetic)驱动安装过程及操控实际机械臂过程
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/597453/
转载文章受原作者版权保护。转载请注明原作者出处!