

1. 利用状态方程求传递函数公式


状态方程为(G(s)=\dfrac{Y(s)}{U(s)} = C(sI-A)^{-1}B+D)
例1:(m-c-k)系统,求(m\overset{··}{x}+c\overset{·}{x}+kx=f)传递函数。
解:
令(x_1 = x),(x_2=\overset{·}{x})则有:
[\begin{cases} \overset{·}{x_1}=x_2\ \overset{·}{x_2}=\dfrac{1}{m}[-c x_2-k x_1]+\dfrac{f}{m} \end{cases}]
根据状态方程的向量表达式和输出方程的向量表达式
[\begin{cases} \overset{·}{X} = AX+Bf \ Y = CX+Df \end{cases}]
可以得到:
[A=\left[\begin{matrix} 0 & 1\ -\dfrac{k}{m}& -\dfrac{c}{m} \end{matrix}\right]\qquad B = \left[\begin{matrix} 0\ \dfrac{1}{m} \end{matrix}\right]\qquad C=\left[ \begin{matrix}1&0\end{matrix}\right]\qquad D = 0 \qquad X = \left[\begin{matrix}x_1\x_2\end{matrix}\right] ]
所以
[(sI-A)^{-1} = \left[\begin{matrix} s&-1\ \dfrac{k}{m}&s+\dfrac{c}{m} \end{matrix}\right]^{-1}=\dfrac{1}{\left|\begin{matrix} s&-1\ \dfrac{k}{m}&s+\dfrac{c}{m} \end{matrix}\right|}\left[\begin{matrix} s+\dfrac{c}{m}&1\ -\dfrac{k}{m}&s \end{matrix}\right] ]
可以得到
[G(s)=\dfrac{1}{s^2+\dfrac{c}{m}s+\dfrac{k}{m}}\left[\begin{matrix}1&0\end{matrix}\right]\left[\begin{matrix} s+\dfrac{c}{m}&1\ -\dfrac{k}{m}&s \end{matrix}\right] \left[\begin{matrix} 0\ \dfrac{1}{m} \end{matrix}\right]=\dfrac{1}{ms^2+cs+k} ]
2. 反馈控制
2.1 状态反馈控制器设计
控制律为(u = -KX + v)
将控制律带入状态方程可以得到,闭环系统(\begin{cases} \overset{·}{X}=(A-BK)X+Bv\ Y = CX \end{cases})
传递函数为(G_K(s)=C(sI-A+BK)^{-1}B)
例2:(\overset{··}{x}=\overset{·}{x}+x+u) ,如何设计(u) ,使得(x \rarr x_d\quad(t\rarr\infty)) ,(x_d) 为常数。
解:
输入是(u),特征方程为(s^2-s-1=0)
可以看出该系统开环不稳定,因为有一个根在右半平面,可以设计(u=-2\overset{·}{x}-2x+x_d)
代入上述系统,可得(\overset{··}{x}+\overset{·}{x}+x=x_d)
对于此时的闭环系统,输入是(x_d),特征方程为(s^2+s+1=0),该方程两根为负,闭环稳定。
如果利用状态方程的方法,那么可以令(x_1 = x),(x_2=\overset{·}{x}),可以得到
[\begin{cases} \overset{·}{x_1}=x_2\ \overset{·}{x_2}=x_1+x_2+u \end{cases}]
那么可以得到:
[A=\left[\begin{matrix} 0 & 1\ 1&1 \end{matrix}\right]\qquad B = \left[\begin{matrix} 0\ 1 \end{matrix}\right]\qquad C=\left[ \begin{matrix}1&0\end{matrix}\right]\qquad D = 0 \qquad X = \left[\begin{matrix}x_1\x_2\end{matrix}\right] ]
控制律为(u = -KX + x_d),其中(K=[k_1, k_2]),那么
[\begin{aligned} (sI-A+BK)^{-1} &= \left( \left[ \begin{matrix} s&0\ 0&s \end{matrix}\right]-\left[\begin{matrix} 0 & 1\ 1&1 \end{matrix}\right]+\left[\begin{matrix} 0\ 1 \end{matrix}\right][k_1, k_2]\right)^{-1}\ &=\left[ \begin{matrix} s&-1\ -1+k_1&s-1+k_2 \end{matrix}\right]^{-1}\ &=\dfrac{1}{s^2+(k_2-1)s+k_1-1}\left[\begin{matrix} s-1+k_2&1\ 1-k_1&s \end{matrix}\right] \end{aligned} ]
传递函数为
[\begin{aligned} G_k(s)&=C(sI-A+BK)^{-1}B\ &=\dfrac{1}{s^2+(k_2-1)s+k_1-1}\left[ \begin{matrix}1&0\end{matrix}\right]\left[\begin{matrix} s-1+k_2&1\ 1-k_1&s \end{matrix}\right]\left[\begin{matrix} 0\ 1 \end{matrix}\right]\ &=\dfrac{1}{s^2+(k_2-1)s+k_1-1} \end{aligned} ]
如果令(k_1=k_2=2),那么得到的特征方程为(s^2+s+1=0),与上面开始做的一样。
下图为状态反馈系统结构图

2.2 输出反馈控制器设计
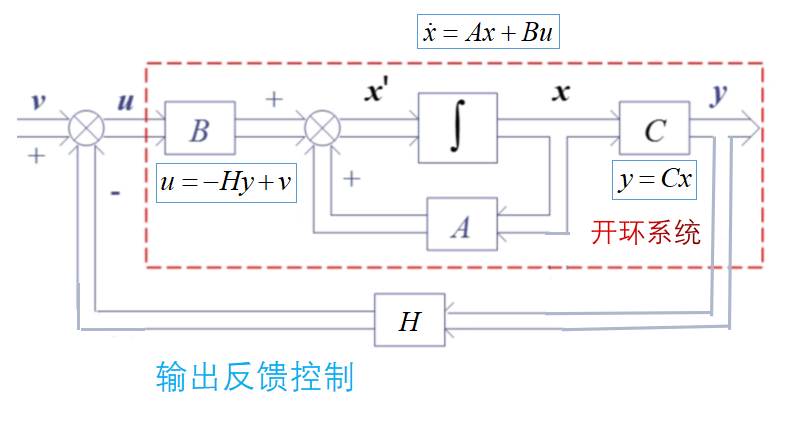
控制律为(u = -HY + v)
将控制律带入状态方程可以得到,闭环系统(\begin{cases} \overset{·}{X}=(A-BHC)X+Bv\ Y = CX \end{cases})
传递函数为(G_H(s)=C(sI-A+BHC)^{-1}B)
输出反馈可看作状态反馈的特例,比如当y=x时,C=1。
下面是输出反馈系统结构图
该控制器就是PID控制器的设计原理。
3. 反馈线性化
例3:(\overset{··}{x}=\overset{·}{x}\ ^2+x+u) ,如何设计(u) ,使得(x\rarr x_d\quad(t\rarr \infty)) ,其中(x_d) 为常数。
设计 (u=-\overset{·}{x}\ ^2-x+v)
代入系统 (\overset{··}{x}=\overset{·}{x}\ ^2+x+u)
可以 去掉非线性项,得到(\overset{··}{x}=v)
上面的方程已经完成线性化,但是 开环不稳定。利用 反馈控制的方法,设计:(v=-\overset{·}{x}-x+x_d)
得到 闭环稳定的系统:(\overset{··}{x}+\overset{·}{x}+x=x_d)
我们可以写出闭环系统的跟踪误差方程。令(\epsilon=x-x_d),则系统可以转化为
[\overset{··}{\epsilon}+\overset{·}{\epsilon}+\epsilon=0 ]
该方程有两个复根,可以描述成(s_{1,2}=\alpha\plusmn\beta i)的形式,其中(\alpha
解可以表示为:(\epsilon_{1,2}=e^{\alpha t}(c_1cos\beta t\plusmn c_2isin\beta t))
可以得出分析出(\epsilon_{1,2}\rarr0),说明该系统稳定。
反馈线性化方法归纳: 输入-状态线性化和 输入-输出线性化:

- 对于前者,本例中可以令(z=z(x)=\overset{·}{x}\quad \overset{··}{x}=v),则可以解得(u=u(x, v)=-\overset{·}{x}\ ^2-x+v),此时的线性系统就是(\overset{··}{x}=v)
- 对于后者,本例中可以令(y=h(x)=x),故(\overset{··}{y}=g(x,u)=\overset{··}{x}=\overset{·}{x}\ ^2+x+u),这样就得到了输出(y)与输入(u)的关系,令(\overset{··}{y}=v),同样得到(u=-\overset{·}{x}\ ^2-x+v)。
可以看出,本例两种方法解的过程是一致的。
Original: https://www.cnblogs.com/hitwherznchjy/p/16187898.html
Author: 静候佳茵
Title: 汽车控制理论数学基础——状态方程
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/567919/
转载文章受原作者版权保护。转载请注明原作者出处!