



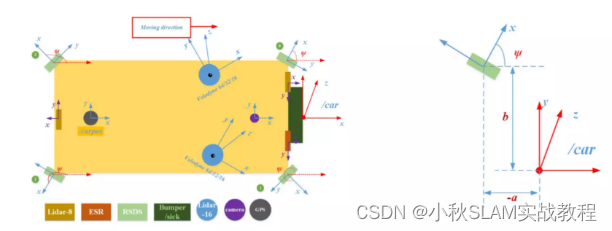




; 多传感器融合
相机内参
kalibr
IMU内参
imu_utils
相机+IMU外参
kalibr
雷达+相机外参
autoware
原理是选取不同时刻的激光雷达扫描点云以及对应最为接近的相机点云进行匹配得出相机和雷达之间的外参。选取的点云数量越多,计算的精度就越高。
雷达+IMU外参
直接标定
1、lidar_align不适用于
Original: https://blog.csdn.net/qq_21950671/article/details/126316113
Author: 小秋SLAM实战教程
Title: 【自动驾驶多传感器融合+多算法融合】
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/559440/
转载文章受原作者版权保护。转载请注明原作者出处!