

1、毫米波雷达介绍
1.1 什么是毫米波雷达
通常将波长为1~10毫米的电磁波称毫米波,车载毫米波雷达工作的频段为24GHz和77GHz,少数国家(如日本)采用60GHz频段。车载毫米波雷达通过天线向外发射毫米波,接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息,然后根据所探知的物体信息进行目标追踪和识别分类,进而结合车身动态信息进行数据融合,最终通过(ECU)进行智能处理。
电磁波有几种特性,当电磁波遇到不同介质时会发生反射、吸收、透射、衍射等现象,毫米波主要是利用电磁波的反射,通过发送和接收电磁波的时间计算反射物体的位置,波长越长,越容易发生透射和衍射现象,而波长越短,则很容易被反射。目前主要是24HZ,未来会采用77HZ和79HZ的,频率越高,波长越短,反射性越好,分辨率越高。
特点:
1)工作在毫米波波段(millimeter wave )探测的雷达。工作频段一般为30GHz ~ 300 GHz, 波长 1~10mm,介于微波和厘米波之间,兼具有微波雷达和光电雷达的一些优点;
2)毫米波雷达具有体积小、质量轻和空间分辨率高的特点。与红外、激光、摄像头等光学传感器相比,毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候全天时的特点。另外,毫米波雷达的抗干扰能力也优于其他车载传感器。
3)车载毫米波雷达的工作频率为一般为 24GHz 和77GHz ;
1.2 毫米波雷达种类
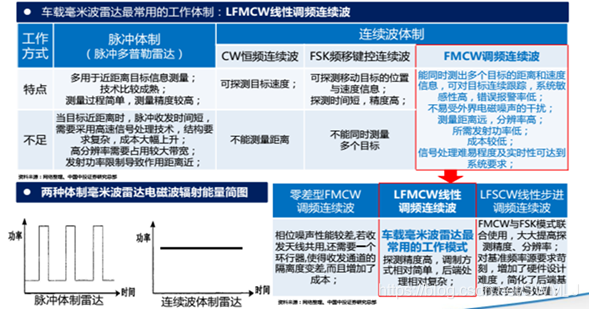
根据辐射电磁波方式不同,毫米波雷达主要有 脉冲体制以及 连续波体制两种工作体制。
连续波可以分为:FSK(频移键控)、PSK(相移键控)、CW(恒频连续波)、FMCW(调频连续波)等方式。

1.3 毫米波雷达测距、侧速、测方位角
毫米波和大多数微波雷达一样,有波束的概念,也就是发射出去的电磁波是一个锥状的波束,而不像激光是一条线。这是因为这个波段的天线,主要以电磁辐射,而不是光粒子发射为主要方法。优点,可靠,因为反射面大,缺点,就是分辨力不高。
测距:(TOF)通过给目标连续发送毫米波信号,然后用传感器接收从物体返回的毫米波,通过探测毫米波的飞行(往返)时间来得到目标物距离;电磁波在空气中传播时间3*10^8m/s。
测速:第一种方法基于dopler原理,根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单地说就是相对速度正比于频率变化量;第二种方法通过跟踪位置,进行微分得到速度。
测方位角:通过并列的接收天线收到同一目标反射的雷达波的相位差计算得到目标的方位角;
1.4 毫米波雷达目标特性解读
1.目标探测能力具有独特优势:
a、纵向目标探测距离与速度探测能力强;
b、可实现远距离感知与探测;
c、对于静态和动态目标均能作出高精度测量;
2.当前毫米波雷达目标探测劣势:
1)无法成像,无法进行图像颜色识别;
2)对横向目标敏感度低,例如:对横穿车辆检测效果不佳;
3)行人反射波较弱,对行人分辨率不高,探测距离近;
4)对高处物体以及小物体检测效果不佳;
3.相比于摄像头和激光雷达,毫米波雷达的优势:
1)全天候、全天时工作特性 – 不论昼夜,不受天气状况限制,即使雨雪天都能正常工作;
2)环境适应性强,不良天气环境下仍能正常工作 – 穿透能力强,雨、雾、灰尘等对毫米波雷达干扰较小;
3)测速,测距能力强;
2、FMCW雷达
FMCW雷达是最常用的车载毫米波雷达。能同时测出多个目标的距离和速度信息,可对目标连续跟踪,系统敏感性高,错误报警率低;不易受外界电磁噪声的干扰;测量距离远,分辨率高;所需发射功率低;成本较低;信号处理难易程度及实时性可达到系统要求。
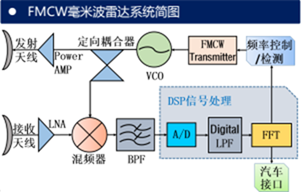
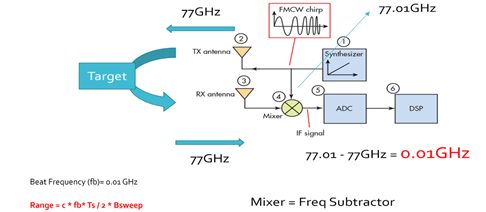
FMCW雷达系统主要包括收发天线、射频前端、调制信号源和信号处理模块等。
1.FMCW调制信号发生器经过压控振荡器(VCO)产生高频信号(GHz级别),一部分能量耦合输入混频器作为本振信号,另一部分能量经功率放大器(PA)由发射天线以电磁波的方式向空中辐射。
2.电磁波在空气中向前方传播过程中如遇到目标则会小部分反射,反射回来的回波信号被接收天线截获形成电信号。
3.回波信号经低噪声放大器(LNA)放大,与本振信号在混频器进行混频, 输出一个较低的差拍频率(一般为MHz级别),差频信号含有目标和雷达之间的距离和相对速度等信息。
4.然后通过带通滤波器(BPF)放大滤波,A/D转换,对所得到的数字信号作FFT(快速傅氏运算),进行频谱分析,便可以获得目标和雷达之间的距离、相对速度及方位角等信息。
5.最后经由控制电路做出危险状况的判断,向驾驶员发出预警,或结合环境情况对汽车做出主动干预。
2.1 FMCW扫频波基础
毫米波是电磁波,现在我们首先简单回顾一下电磁波的基础知识。
波形公式

波长λ:播完整周期电磁波所走过的距离;
频率:单位时间内传播的波数;汽车雷达通常工作在W波段(76GHz – 81GHz);
幅值A:信号强度/能量,单位为dB/dBm,1 dBm=1 mW;
相位ϕ:波传播过程中该时刻所在的位置点;
雷达通常发射扫频信号(三角波或锯齿波),红色的为发射的扫频信号,绿色的为接收的回波信号,通过这两个信号,我们就可以获得距离和速度信号(下图为目标物静止时的回波信号,有相对速度时会有多普勒频移),B为扫频带宽,Ts为扫频周期(chirp time)。
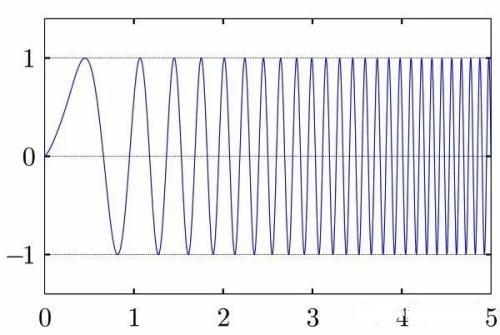
扫频信号

FCWM waveform source: emagtech
2.2 FMCW测距原理
根据Trip time t可以获取距离信息。由于t无法直接测量,因此我们通过FMCW扫频波进行测量。
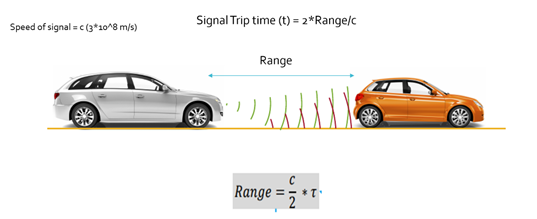
Signal trip time for a radar signal
暂时不考虑多普勒频移(相对静止),距离公式推导如下图所示。
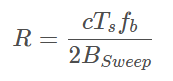
其中fb: beat frequency(静止时频偏 fd = 0,fb=fr),Ts: Sweep time 扫频时间,BSweep: Sweep bandwidth 扫频带宽;
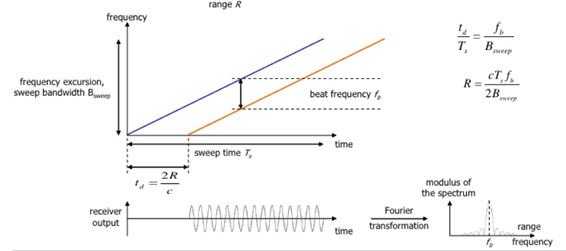
Range Estimation using FMCW source : Delft University of Technology
Range Calculation – System Level
多普勒频移公式

雷达主要利用多普勒频移来直接测量移动物体的速度,即雷达向前发射毫米波波段的电磁波,并接收其回波;如遇到移动物体,则回波频率与发射频率会出现偏差,即多普勒频移;利用此频移即可获得相对速度。多普勒频移公式如下:
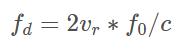
其中fd为多普勒频移,vr为相对速度,f0为发射频率(24GHz/77GHz/79GHz),c为光速;由此公式可以推导出,对于77GHz毫米波雷达,f0=76.5GHz,vr=1m/s相对速度约对应fd=510Hz频移以及1km/h相对速度约对应fd=0.1418kHz频移。

FMCW Doppler Estimation source : Delft University of Technology
2.3 运动目标测距测速原理
FMCW调频连续波雷达的不同调制形式:
a、正弦波调制 b、锯齿式波调制 c、三角波调制
不同调频方式的雷达硬件构成基本相同,只有小部分电路模块、电路参数与信号处理算法有所区别;对于单个静止物体的测量,锯齿波调制方式即可满足;对于运动物体,多采用三角波调制方式。
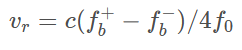
三角波是由两个对称的线性调频连续波(Linear Frequency Modulated Continuous Wave,LFMCW)组成,分为上、下扫频,利用上、下扫 频差拍信号频谱对称的性质,对距离和速度进行解耦,算法简单,在此进行介绍。对于锯齿波,一个周期内无法解算出多普勒频移fd和相对静止时的频率fr,需要连续观测多个周期进行解算。
对称三角波雷达发射对称的上、下扫频段线性调频信号,对每一扫频段,通过将发射信号与接收信号进行混频获得回波差拍信号,差拍信号包含目标的距离和径向速度信息,利用上、下扫频段差拍信号频谱对称的性质,得到目标的距离和速度参数。
对称三角波雷达发射信号、回波信号及差拍信号时频关系如下图所示:

三角波雷达测距测速
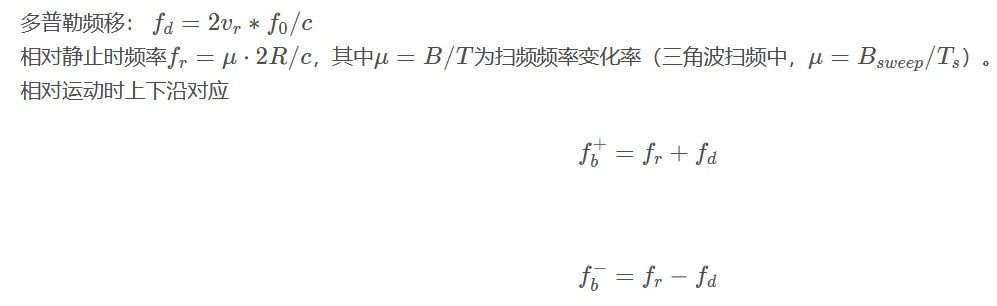
距离

相对速度
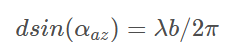
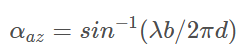
2.4 雷达相位法测角原理
目前雷达普遍采用平面阵列天线,多发多收(比如2Tx 4Rx天线),通过监测同一目标物反射回来的毫米波的相位差b,就可以解算出被测目标的方位角;
回波到达不同Rx天线有dsin(α)的波程差,对应空间距离为λb/2π,求解过程如下:

3、雷达天线
FCMW硬件定义中,天线是一个收发器,实现电能和电磁波的转换。天线发射信号后,这些电磁波向外扩散,遇到障碍物后反射回来。根据目标表面类型和形状,部分电磁波反射回雷达接收天线,然后雷达放大接受的信号并送回混频器进行进一步处理。
天线有很多类型,汽车77GHz毫米波雷达最常用的是贴片天线,具有成本低,制造工艺简单,尺寸小等优点。
天线方向图
天线方向图(antenna pattern)是天线发射强度的几何模型。
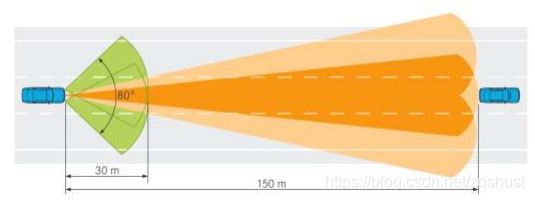
天线水平波束宽度(beamwidth)决定雷达传感器的FOV视角。如果雷达只需要探测当前车道的物体,则波束宽度要窄以保证覆盖当前车道期望的距离。如果波束宽度较大则会探测到相邻车道的目标物。

天线辐射时,不仅包括主瓣,还包括旁瓣。旁瓣对雷达感知影响较大,天线旁瓣指向不同的方向,可能会感知到主瓣外的目标导致误报。为避免旁瓣误检通常要求主瓣峰值能量超过旁瓣30dB。
4、RCS雷达截面积
RCS(Radar Cross Section )雷达截面积σ(m^2),是指目标物反射雷达能量的大小和能力,雷达RCS截面积取决于:
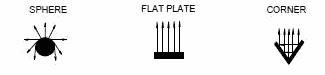
1.目标物的物理属性和外部特征;光滑的边或平面会将雷达波散射到各个方向,因此RCS较低,而尖锐边角会将发射的雷达波聚焦反射回雷达接收天线,因此RCS较高;
2.雷达探测方向;
3.雷达发射频率;
4.目标物(乘用车,卡车,自行车,行人的衣服材料等)的材料。
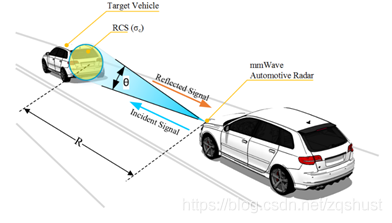
如果目标为对入射雷达波均匀反射至各个方向,则雷达截面积等于雷达所看到的目标物截面积。但实际上,入射雷达波不是均匀反射(下图是不同目标几何形状的反射波),而且部分能量被吸收。因此,雷达截面积很难进行估计,通常通过测试得到。
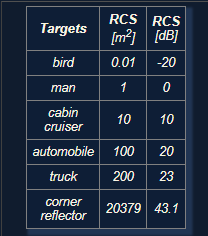
RCS单位除 m^2 外,也可以是dB,换算公式如下:

以下是不同目标RCS值。
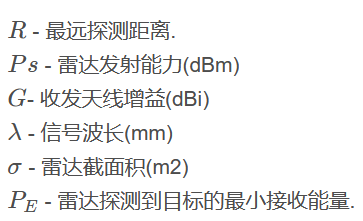
5、雷达方程
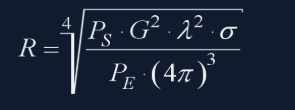
雷达方程用于设计雷达收发器,天线以实现预定的能量,增益,和噪声性能以达到雷达要求。
长距离雷达最远可探测300m距离,为检测较小截面积的目标,长距离雷达相对短距离雷达(如探测距离50m)需要较高的发射能量和天线增益。如果目标物RCS较大,则雷达可以在较远的距离探测到。以下是雷达方程:
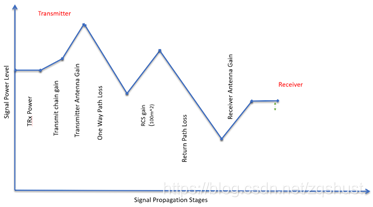
下图显示了雷达波发射传播反射过程中的信号强度值变化。
能量变化过程包括:
发射器信号能量
发射链能量增益:功放增益信号能量;
发射天线进一步增益信号能力;
雷达波从雷达传播到目标物时的能量损失;
根据目标物RCS的不同,反射不同能量的回波;
雷达回波传播回目标物时的能量损失;
接收天线放大器在发射给处理单元前增益回波信号。
6、雷达性能参数



Tc为chirp总周期(包括active chirp time+idle time)



FOV 探测视角范围
FOV Field of View探测视角范围。
————————————————
版权声明:本文部分采用了CSDN博主「庐陵小子」的文章内容。
原文链接:https://blog.csdn.net/zqshust/article/details/115587922
Original: https://blog.csdn.net/xucc21/article/details/121406192
Author: 爱钓鱼的小点点
Title: 自动驾驶目标识别—–毫米波雷达学习笔记(1)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/559388/
转载文章受原作者版权保护。转载请注明原作者出处!