

提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
ROS发布与订阅处理顺序以及多线程使用
一、前言
记录ROS发布与订阅处理顺序以及多线程使用,由于情况很多,所以不一一细讲,有需要的可以自己尝试。这里简单讲解两个话题以及两个订阅者的情况。
二、发布者
发布方发布两个话题:
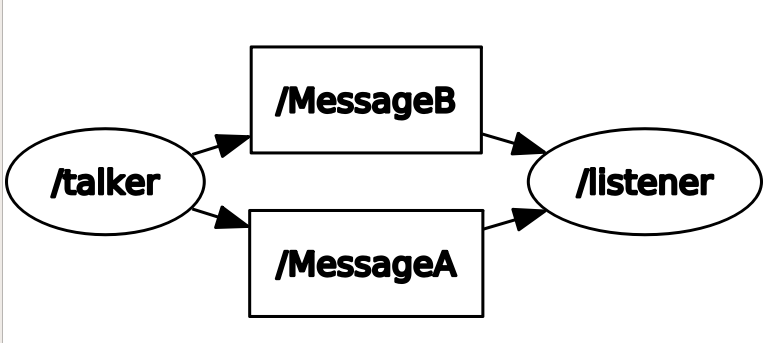

talker发布两个话题,然后每个话题都各自开辟自己的队列
(有一些人说之开辟一个队列,个人觉得不严谨,只是因为话题处理是单线程,所以和简化成一个队列类似。这里可以去了解以下话题通讯协议)。如何队列被占满,就会丢弃旧的信息。可以修改参数:
1、话题1的队列长度
2、话题2的队列长度
3、话题1的发布频率
4、话题2的发布频率
#include "ros/ros.h"
#include "std_msgs/String.h"
#include
int main(int argc, char **argv) {
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher message_a_pub = n.advertise<std_msgs::String>("MessageA", 1000);
ros::Publisher message_b_pub = n.advertise<std_msgs::String>("MessageB", 1000);
int message_a_count = 0;
int message_b_count = 0;
while (0 == message_a_pub.getNumSubscribers() || 0 == message_b_pub.getNumSubscribers()) {
ROS_INFO("Waiting for subscribers to connect");
ros::Duration(0.1).sleep();
}
ros::Timer timer_a = n.createTimer(ros::Duration(0.1), [&](const ros::TimerEvent&) {
std_msgs::String msg;
std::stringstream ss;
ss << "Messages A: " << message_a_count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
message_a_pub.publish(msg);
message_a_count++;
});
ros::Timer timer_b = n.createTimer(ros::Duration(0.1), [&](const ros::TimerEvent&) {
std_msgs::String msg;
std::stringstream ss;
ss << "Messages B: " << message_b_count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
message_b_pub.publish(msg);
message_b_count++;
});
ros::spin();
return 0;
}
三、订阅者
订阅者订阅两个信息,并在回调函数处理。
由于订阅者是没有所谓的订阅频率的(和程序的处理速度有关),这里使用简单的休眠来模拟”订阅频率”。 简单的话题订阅频率默认和发布频率一样。
可以修改参数:
1、订阅话题1的队列长度
2、订阅话题2的队列长度
3、订阅话题1的发布”频率”(在回调函数设置休眠来模拟)
4、订阅话题2的发布”频率”(在回调函数设置休眠来模拟)
#include
#include
#include
#include "ros/ros.h"
#include "std_msgs/String.h"
using namespace std::chrono_literals;
void CallbackA(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
ros::Rate rate(1);
rate.sleep();
}
int main(int argc, char **argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::NodeHandle n_a;
ros::Subscriber sub_a = n_a.subscribe("MessageA", 100, CallbackA);
ros::Subscriber sub_b = n.subscribe("MessageB", 10, CallbackB);
ros::MultiThreadedSpinner spinner(2);
spinner.spin();
return 0;
}
四、测试结果
1、单线程
- 测试1
发布者参数设置(1000,1000,0.1,0.1) //分别表示话题1队列长度,话题2队列长度,发布频率,发布频率
订阅者参数设置(1,1,0,0) //分别表示话题1队列长度,话题2队列长度,订阅频率(0表示不设置休眠),订阅频率(设置休眠0s)
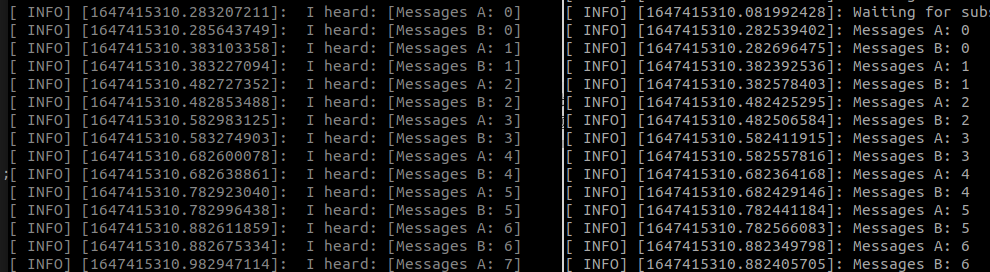
话题交替出现。
如果回调函数是简单数据处理,基本都是按这种理想方式出现,但是如果回调函数处理速度比发布频率慢,那么就对出现各种情况。在这时候,话题的队列长度就可以体现作用。(如果想了解的,可以修改休眠时间和队列长度,去看看实际效果)2. 测试2
参数:
发布者参数设置(1000,1000,0.1,0.1) //分别表示话题1队列长度,话题2队列长度,发布频率,发布频率
订阅者参数设置(1,1,0,1) //分别表示话题1队列长度,话题2队列长度,订阅频率(0表示不设置休眠),订阅频率(设置休眠1s)
结果:
订阅话题是按照1Hz频率来订阅,虽然订阅话题1没有设置休眠,但是还是和话题2一样,主要原因是,订阅话题是单线程。就像将订阅话题放进一个队列来处理一样,处理完一个,才能处理下一个。所以导致两个话题发布频率一样。解决方法办法是使用多线程(少量数据的时候都ok,但是长时间处理没去试)。
2、多线程
订阅者代码:
#include
#include
#include
#include "ros/ros.h"
#include "std_msgs/String.h"
using namespace std::chrono_literals;
void CallbackA(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
ros::Rate rate(1);
rate.sleep();
}
int main(int argc, char **argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::NodeHandle n_a;
ros::Subscriber sub_a = n_a.subscribe("MessageA", 1, CallbackA);
ros::Subscriber sub_b = n.subscribe("MessageB", 1, CallbackB);
ros::MultiThreadedSpinner spinner(2);
spinner.spin();
return 0;
}
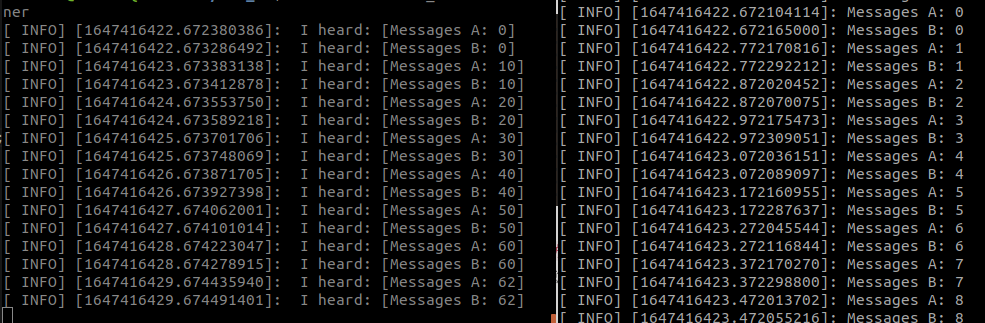
结果:
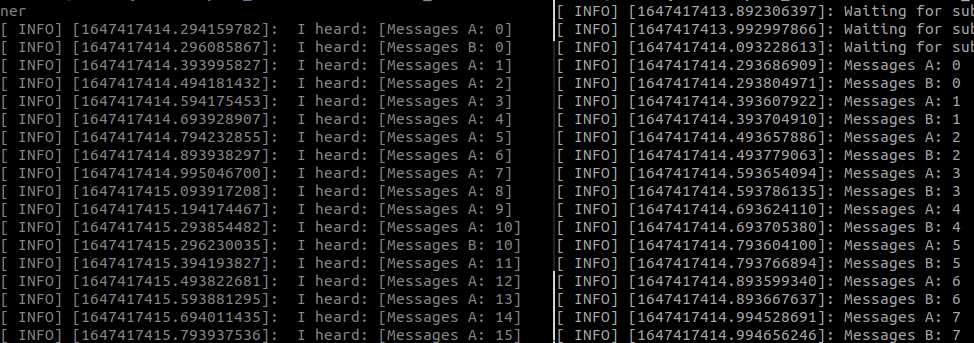
话题A的频率变成10Hz,而话题B的频率是1Hz。
3、单独为某个话题开辟线程
#include
#include
#include
#include "ros/ros.h"
#include "std_msgs/String.h"
using namespace std::chrono_literals;
void CallbackA(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
ros::Rate rate(1);
rate.sleep();
}
int main(int argc, char **argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::NodeHandle n_a;
ros::CallbackQueue callback_queue_a;
n_a.setCallbackQueue(&callback_queue_a);
ros::Subscriber sub_a = n_a.subscribe("MessageA", 1, CallbackA);
ros::Subscriber sub_b = n.subscribe("MessageB", 1, CallbackB);
std::thread spinner_thread_a([&callback_queue_a]() {
ros::SingleThreadedSpinner spinner_a;
spinner_a.spin(&callback_queue_a);
});
ros::spin();
spinner_thread_a.join();
return 0;
}
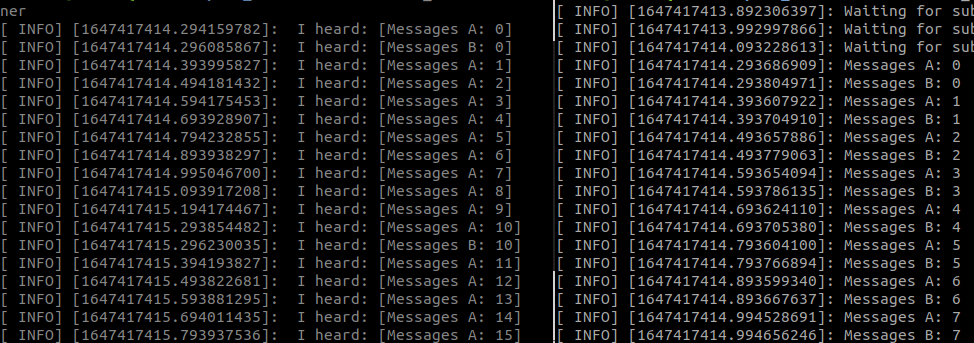
结果:
和多线程一样。
五、总结
- 话题发布基本流程:每一个话题都各自开辟自己队列,然后把数据发布到队列中,等待订阅者读取,如果订阅者来不及处理,那么当发布者队列被沾满后,就会将旧的数据覆盖。
- 订阅者的订阅频率取决于回调函数的处理速度,单线程时,回调函数的频率是一样的,等于所有回调函数处理时间之和的倒数。
- 如果多线程,可以避免部分数据丢失。
注:实际代码可能会出现更复杂情况,而不是简单的休眠来替代回调函数处理时间。
Original: https://blog.csdn.net/qq_16539009/article/details/123526165
Author: 柯藤
Title: ROS发布与订阅处理顺序以及多线程使用
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/559248/
转载文章受原作者版权保护。转载请注明原作者出处!