

系列文章目录
第一章 激光雷达介绍
第二章 脉冲型激光雷达
第三章 FMCW激光雷达
第四章 AMCW 激光雷达
第五章 激光雷达在自动驾驶中的安全问题
文章目录
- 系列文章目录
- 前言
- 一、LiDAR工作过程
- 二、LiDAR分类
- 二、重要的LiDAR参数
* - 1. 测距量程(Maximum Range)
- 2. 测距精度(Range Precision)和距离分辨率(Range Resolution)
- 3. 视场角和分辨率(FoV and Lateral Resolution)
- 市面LiDAR参数调研
- 总结
- 参考文献
前言
3D成像技术应用于众多领域,包括自动驾驶汽车、无人机和机器人,以及在先进的工业、医疗、科学、和消费市场。 3D 成像通常通过对目标物体的距离测量来生成环境点云,从而感知整个环境。可以使用不同的方法进行距离测量,包括双目相机(stero camera),超声波雷达(ultrasonic ),射频雷达(俗称Radar),以及本系列文章要着重介绍的激光雷达LiDAR( Light Detection And Ranging)。双目相机依赖对2D图片的处理来测距;超声波雷达能直接测距,但由于声波在空气中的衰减大,测距距离往往只有几米;Radar用射频信号(波长毫米级)测距,LiDAR用光波(波长在1微米左右)测距,两者本质上都是电磁波,但光波的波长更短,能够以更高的分辨率来成像,且激光的指向性更强,无疑是一种优秀的3D点云成像方式,这也是本系列文章想要介绍激光雷达的原因。
本系列文章预计会持续更新。
一、LiDAR工作过程


“High Level”的LiDAR工作过程非常简单,就是每秒百万次的测距过程。Velodyne公司1的描述简洁明了,我将其翻译并截图如上,虽然这是对脉冲型LiDAR的工作过程解释,但其他种类的LiDAR(除FLASH LiDAR外) 工作过程也大同小异。

基本的LiDAR组件如上图 2 所示,激光调制电路调制出射光的强度/频率/相位,光束操控(beam steering)电路控制出射光的方向以完成扫描,接收装置通常是一个光电传感器,收到回波信号后将其传送给信号处理电路进行信号的滤波、放大、计算等。
; 二、LiDAR分类
目前市面上的激光雷达按照 光束操控电路或光束扫描结构来分,一般会分为机械旋转式,半机械旋转式(如MEMS、棱镜),纯固态(如OPA、FLASH、FPSA 3)。

例如上图是我用过的LiDAR,其中VLP-16和RS-16是机械旋转式,RS-M1是MEMS。纯固态LiDAR虽然velodyne和quanergy的官网都有介绍,目前中国的小鹏和华为极狐车上也有搭载,但个人用户似乎没有购买渠道。
根据扫描结构来分类是自然且直观的,但仅知道这一种分类方式对LiDAR的了解是不够全面的。为了帮助读者对激光雷达的工作原理有更深入的理解,本系列根据LiDAR的 测距原理以及激光波形来分类,将LiDAR分为脉冲型(pulsed),调频连续波(FMCW),调幅连续波(AMCW)。
; 二、重要的LiDAR参数
在LiDAR选型和设计时,我们需要关注的LiDAR参数有测距量程,轴向精度,分辨率,视场角。
1. 测距量程(Maximum Range)
最大测距范围通常受到发射功率和接收器灵敏度的限制。为了保证人眼的安全,最大发射功率有一个限制。工业上,可以通过减小光束发散角及其旁瓣来提高工作范围。
在FMCW激光雷达类型中,激光束的相位噪声也会限制量程。
在所有激光雷达类型中,较大的接收孔径可以增加收集的光功率进而增加量程。
2. 测距精度(Range Precision)和距离分辨率(Range Resolution)
测距精度通常指对于固定距离目标的多个距离测量的标准差(记为δ R δ_{R}δR )。
在文献4中,特地引出了距离分辨率(range resolution,记为δ R δ{R}δR)的概念,并强调不要把测距精度和距离分辨率搞混。距离分辨率指LiDAR区分轴向多个距离相近的空间物体的能力。距离分辨率可由如下式子表示:
δ R = c 2 B δ{R}=\frac{c}{2B}δR =2 B c
其中c c c是光速,B B B是光波”携带信息”的带宽(原话是B B B is the bandwidth of the information they carry)。射频信号的带宽往往是MHz百级别,所以能达到厘米级的分辨率;而光波信号的带宽大得多,能够达到微米级的分辨率。
虽然测距精度和距离分辨率是两个概念,但他们之间也存在关系。
文献中用如下式子表示:
δ R 2 ∝ δ R 2 S N R δ_{R}^{2} \propto \frac{δ{R}^{2}}{SNR}δR 2 ∝S N R δR 2
其中S N R SNR S N R是接收到的信号的信噪比。
按我的理解以及工程实践,距离分辨率是一个理论概念,距离误差是一个工程统计上的概念。带宽B B B可以等效为信号处理电路的采样率,采样率越高,距离分辨率也就越高。信噪比越高,测距也能越准。
3. 视场角和分辨率(FoV and Lateral Resolution)
机械旋转式LiDAR的视场角(FoV,Fied of View)往往是 水平角*竖直角 = 360° * X 其中X和竖直方向的激光线束排布有关。由于LiDAR的扫描周期是固定的,水平方向的分辨率与LiDAR的转速有关,转速越快则水平分辨率越低。竖直方向的分辨率则是出厂设定好的。
半固态和固态相机的FoV和分辨率一般出厂就设定好了,无法人为更改。
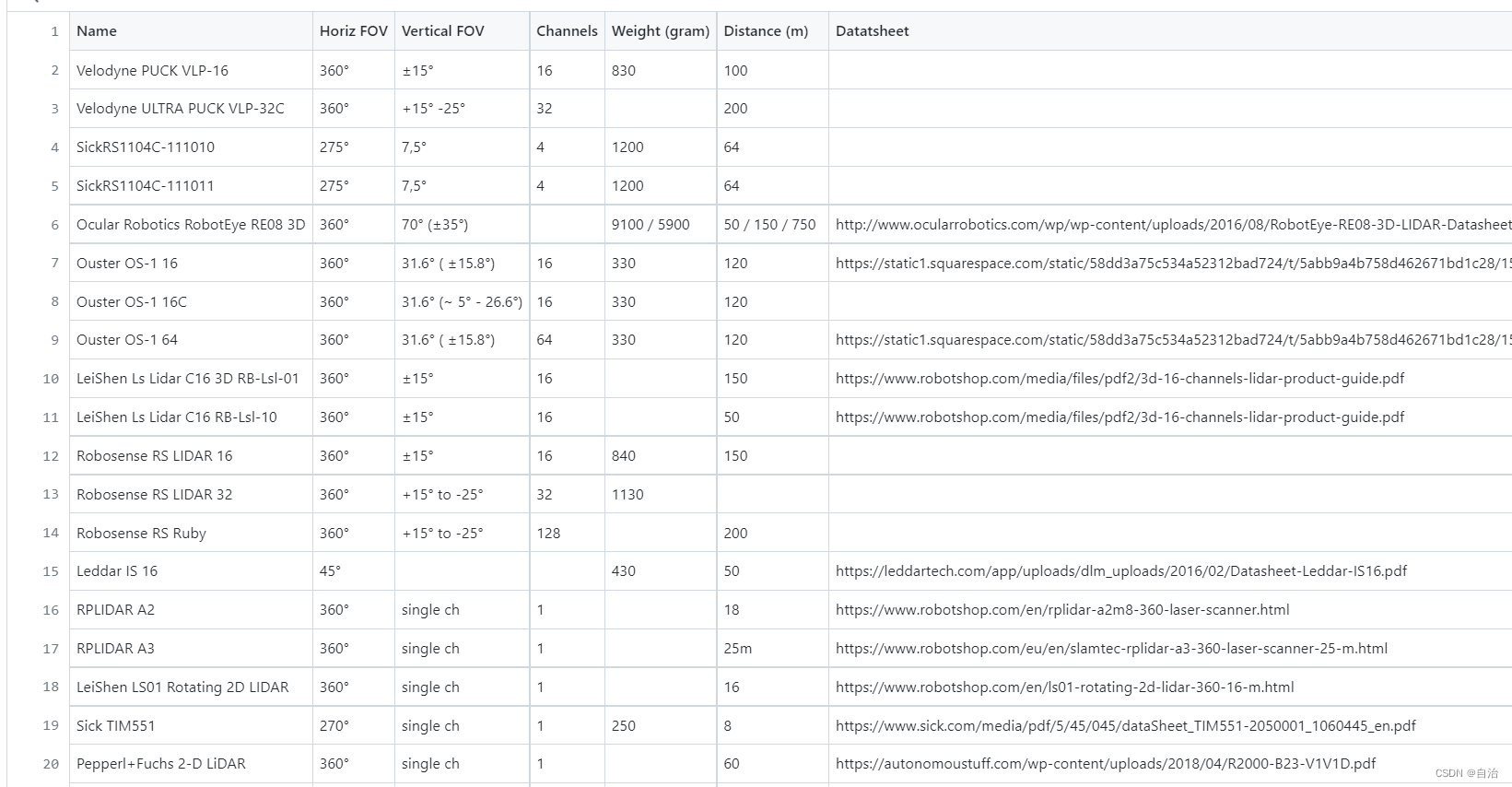
市面LiDAR参数调研
本文附赠市面上三十几款LiDAR的基本参数汇总报告,大致内容如下图所示,点击该链接可以下载。觉得有用的请点个赞哦!
; 总结
在书写过程中,发现LiDAR虽然依然还是一个新兴产业,但其结构及工作原理有比较清晰的发展脉络可以总结。尤其是工作原理的部分,得益于Radar的发展,LiDAR能够借鉴Radar中的许多信号调制技术,包括脉冲、AMCW和FMCW,在下面几篇文章中,我介绍这些技术。
参考文献
Original: https://blog.csdn.net/weixin_43744613/article/details/124466215
Author: 自治
Title: 激光雷达科普(1):激光雷达的分类及重要参数
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/559154/
转载文章受原作者版权保护。转载请注明原作者出处!