

前言
为了后面的视觉激光融合SLAM以及跑通VINS-Fusion,需要标定双目相机和IMU得内参以及它们得外参(变换矩阵)。
准备工作
- 双目相机:ZED-m
- IMU:realsense-t265(仅使用它的imu信息)
- 系统:Ubuntu16.04 + ROS kinetic *(ros推荐使用纯净的,就是新系统装ros,可以使用虚拟机)
双目相机标定
这里需要得到相机的内参矩阵,可以使用相机自带的标定信息,也可以使用标定工具包标定,比如VINS-Fusion,Kalibr,这里我以Kalibr为例。
Kalibr安装
因为后面联合标定也需要使用Kalibr,这里介绍一下它的安装。可以直接进Wiki看官方安装教程,教程写了两种安装方式,这里我们使用源码编译安装。官方使用的Ubuntu14.04+ ROS indigo,亲测Ubuntu16.04也行。
sudo apt install libv4l-dev
cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/Kalibr.git
cd ~/kalibr_workspace
catkin_make
安装完成后我们进行测试,是否安装成功,这里生成一张标定板,为了能够使用A4纸打印,命令如下
roscore
rosrun kalibr kalibr_create_target_pdf --type checkerboard --nx 6 --ny 7 --csx 0.05 --csy 0.05
在当前目录下能找到生成的pdf(如图),按实际大小打印出来,每个格子应该是2.92cm

新建target_6x7.yaml保存参数
target_type: 'checkerboard'
targetCols: 6
targetRows: 7
rowSpacingMeters: 0.029
colSpacingMeters: 0.029
标定过程
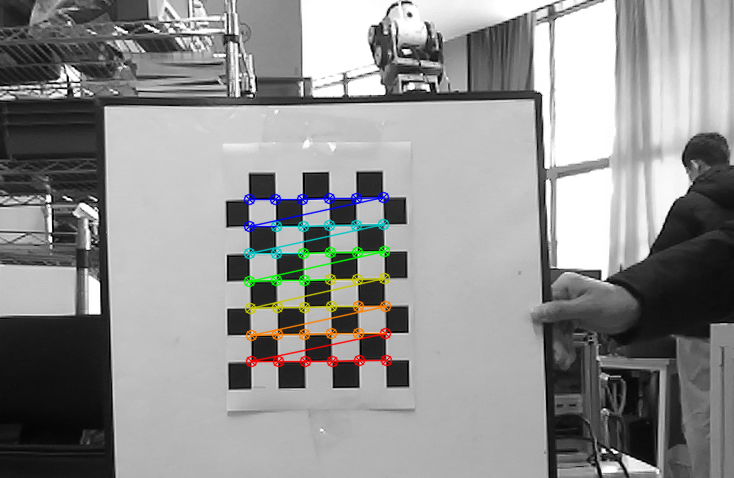
- 将相机固定,在前方移动标定板大概十几秒,记录下bag包:
rosbag record /cmaera/image_1 /camera/image_2 -O camera.bag
这里可以降低相机的发布频率,减小包的大小和后面处理时间
- 进行标定
rosrun kalibr kalibr_calibrate_cameras --target target_6x7.yaml --bag cameara.bag --models pinhole-radtan pinhole-radtan --topics /cmaera/image_1 /camera/image_2 --show-extraction --bag-from-to 5 20
- 标定结果在当前目录生成
yaml文件:
cam0:
cam_overlaps: [1]
camera_model: pinhole
distortion_coeffs: [0.0067221785223551735, 0.0006309071251854829, -0.0009206033732726818,
-0.005807607326385791]
distortion_model: radtan
intrinsics: [374.8798664259513, 376.62433296380203, 633.6382978832153, 368.203361863134]
resolution: [1280, 720]
rostopic: /zedm/zed_node/left/image_rect_color
cam1:
T_cn_cnm1:
- [0.9999958135540992, 0.0007219875640781401, 0.002802072131479685, -0.06140952719752661]
- [-0.0007241075974458178, 0.9999994523273698, 0.0007556541173352181, -0.0009541268599771967]
- [-0.0028015250239860137, -0.0007576799555491327, 0.9999957886804435, 0.0005387148522162342]
- [0.0, 0.0, 0.0, 1.0]
cam_overlaps: [0]
camera_model: pinhole
distortion_coeffs: [0.008041841705316074, 0.0003735182825901831, -0.001170616434022235,
-0.006061625440876723]
distortion_model: radtan
intrinsics: [373.7879644856689, 376.1467414780452, 632.7953296858204, 368.521883006889]
resolution: [1280, 720]
rostopic: /zedm/zed_node/right/image_rect_color
相机标定完成
IMU标定
IMU都有高斯白噪声和随机游走误差,这里使用港科大的imu_utils进行标定。
ceres-solver安装
因为工具需要ceres-solver支持,所以首先编译安装ceres-solver。
sudo apt-get install libgoogle-glog-dev libgflags-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libsuitesparse-dev
wget http://ceres-solver.org/ceres-solver-2.0.0.tar.gz
tar zxf ceres-solver-2.0.0.tar.gz
cd ceres-solver
mkdir build && cd build
cmake ..
make
sudo make install
code_utils安装
sudo apt-get install libdw-dev
cd kalibr_workspace/src
git clone https://github.com/gaowenliang/code_utils.git
cd ..
catkin_make
报错解决:
backward.hpp No such file
- 将报错文件的
#include "backward.hpp"改成#include "code_utils/backward.hpp"
‘integer_sequence’ is not a member of ‘std’
- 将CMakeLists.txt中的
set(CMAKE_CXX_FLAGS "-std=c++11")改成set(CMAKE_CXX_STANDARD 14)
imu_utils安装
cd kalibr_workspace/src
git clone https://github.com/gaowenliang/imu_utils.git
cd ..
catkin_make
注意一定要先编译code_utils再编译imu_utils
录取bag包
- 这里将IMU静置,录取bag包,官方建议是两个小时,时间短点也没事。
rosbag record /imu -O imu.bag
标定
- 在
imu_utils包中新建一个launch文件,格式如下:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
# imu topic的名字
# imu名字,和生成的标定结果文件名有关
#标定的时长,bag包时长
node>
launch>
- 开始标定
roslaunch imu_utils imu.launch
rosbag play -r 200 imu.bag
- 大概不到一分钟就能出结果了,生成的
yaml文件保存在imu_utils的data文件夹中,如下:
`yaml
%YAML:1.0
Original: https://blog.csdn.net/qq_34935373/article/details/122563824
Author: 合工大机器人实验室
Title: 双目相机与IMU联合标定
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558910/
转载文章受原作者版权保护。转载请注明原作者出处!